辅助塔机作业的方法、装置及系统与流程
本公开涉及工程机械,尤其是一种辅助塔机作业的方法、装置及系统。
背景技术:
1、塔式起重机(简称塔机)是建筑施工过程中广泛应用的设备,主要用于大型施工材料、设备的吊装。
2、相关技术中,塔机在运行过程中装载和卸载目标物品时,需要依靠负责现场指挥的工作人员通过目测指挥负责控制吊钩的工作人员移动吊钩至目标位置。
技术实现思路
1、发明人注意到,相关技术中,吊钩的移动需要依靠负责现场指挥的工作人员对吊钩和目标区域的相对位置进行目测,并根据目测结果进行指挥,不仅无法实现快速的吊装,导致塔机的作业效率低,而且吊钩移动过程中,仅依靠肉眼进行观察,吊装精度差,还可能产生安全隐患。
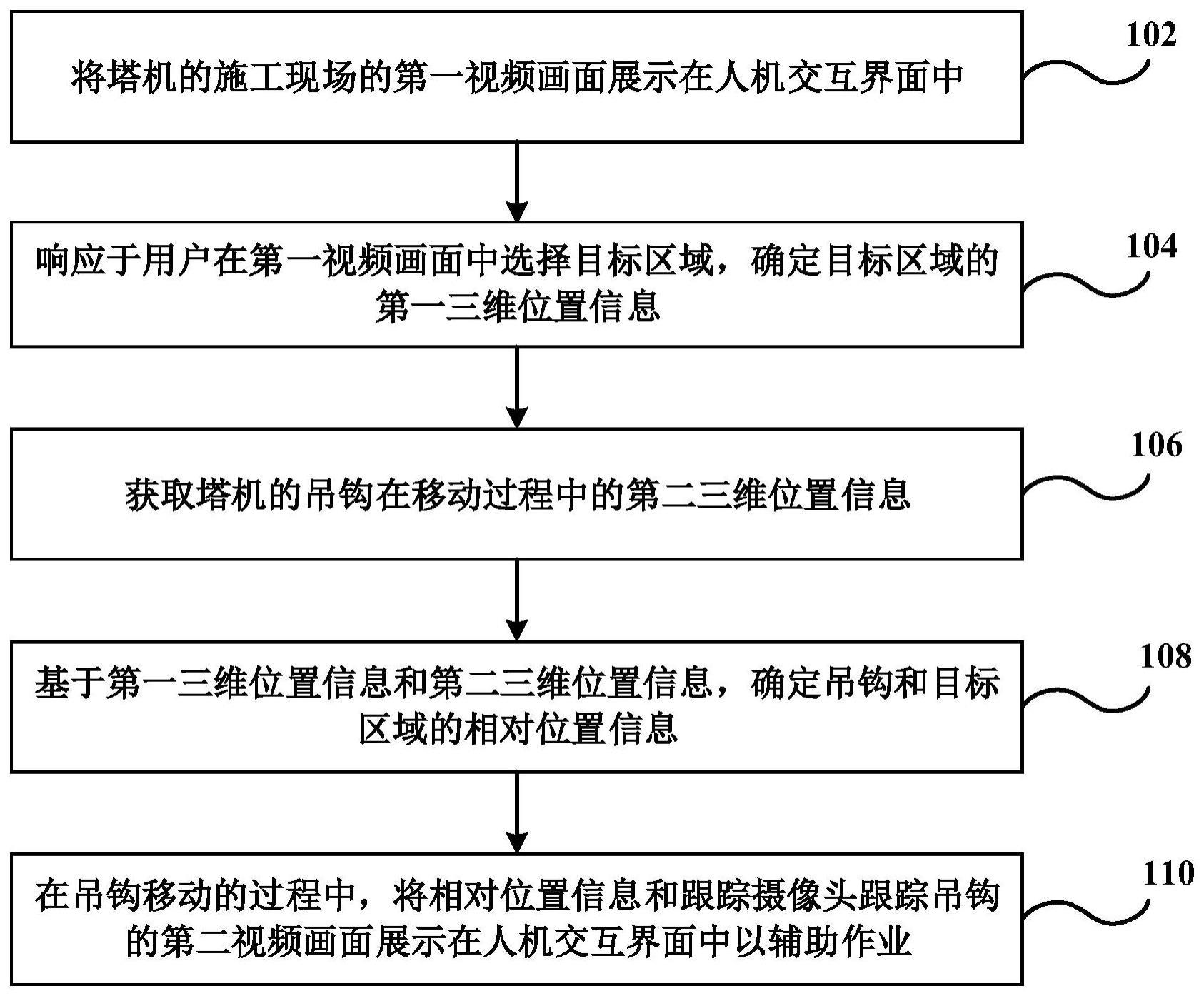
2、根据本公开实施例的一方面,提供一种辅助塔机作业的方法,包括:将塔机的施工现场的第一视频画面展示在人机交互界面中;响应于用户在所述第一视频画面中选择目标区域,确定所述目标区域的第一三维位置信息,所述目标区域包括装载区域和卸载区域中的至少一个;获取塔机的吊钩在移动过程中的第二三维位置信息;基于所述第一三维位置信息和所述第二三维位置信息,确定所述吊钩和所述目标区域的相对位置信息;在所述吊钩移动的过程中,将所述相对位置信息和跟踪摄像头跟踪所述吊钩的第二视频画面展示在所述人机交互界面中以辅助作业,其中,在跟踪所述吊钩的过程中,根据所述吊钩与所述跟踪摄像头之间的第一距离、所述目标区域的尺寸和所述跟踪摄像头的靶面的尺寸实时调整所述跟踪摄像头的焦距。
3、在一些实施例中,所述目标区域的尺寸包括所述目标区域的宽度,所述目标区域的宽度为所述目标区域在与塔机的水平臂架的延伸方向垂直的方向上的尺寸;所述跟踪摄像头的靶面的尺寸包括所述跟踪摄像头的靶面的宽度,所述跟踪摄像头的焦距与所述第一距离正相关,与所述靶面的宽度成正相关,与所述目标区域的宽度负相关。
4、在一些实施例中,所述跟踪摄像头的靶面的宽度和高度的比值为第一比值,所述第二视频画面的宽度和高度的比值为第二比值;所述跟踪摄像头的焦距还与调节系数负相关,所述调节系数为所述第一比值和所述第二比值的比。
5、在一些实施例中,所述第一三维位置信息为所述目标区域在以所述塔机的回转中心为原点的第一坐标系下的第一三维坐标,所述第二三维位置信息为所述吊钩在所述第一坐标系下的第二三维坐标。
6、在一些实施例中,所述响应于用户在所述第一视频画面中选择目标区域,确定所述目标区域的第一三维位置信息包括:获取所述目标区域在以所述全景摄像机为原点的第二坐标系下的第三三维坐标;根据所述回转中心相对于所述全景摄像机的位置,将所述第三三维坐标转换为所述第一三维坐标。
7、在一些实施例中,所述响应于用户在所述第一视频画面中选择目标区域,确定所述目标区域的第一三维位置信息包括:根据所述目标区域中至少一个点在所述第一坐标系下的三维坐标确定所述目标区域的所述第一三维坐标。
8、在一些实施例中,所述目标区域为规则的几何区域,所述目标区域的所述第一三维坐标为所述目标区域的中心在所述第一坐标系下的三维坐标。
9、在一些实施例中,所述目标区域为矩形区域,所述至少一个点包括所述目标区域的顶点,所述根据所述目标区域中至少一个点在所述第一坐标系下的三维坐标确定所述目标区域的所述第一三维位置信息包括:根据所述目标区域的顶点在所述第一坐标系下的三维坐标计算所述目标区域的几何中心在所述第一坐标系下的三维坐标。
10、在一些实施例中,所述获取塔机的吊钩在移动过程中的第二三维位置信息包括:获取所述塔机的水平臂架的回转角度、所述水平吊臂上吊车与所述回转中心之间的第二距离和所述吊钩与所述水平臂架之间的第三距离;根据所述回转角度、所述第二距离和所述第三距离计算所述吊钩在所述第一坐标系下的所述第二三维坐标。
11、在一些实施例中,所述方法还包括:在所述吊钩移动的过程中,若所述吊钩与所述目标区域之间的距离缩小到预设范围内,则突出显示所述目标区域。
12、根据本公开实施例的还一方面,提供一种辅助塔机作业的方法,包括:将塔机的施工现场的第一视频画面展示在人机交互界面中;在塔机的吊钩移动的过程中,将跟踪摄像头跟踪所述吊钩的第二视频画面展示在所述人机交互界面中以辅助作业,其中,在跟踪所述吊钩的过程中,根据所述吊钩与所述跟踪摄像头之间的第一距离、目标区域的尺寸和所述跟踪摄像头的靶面的尺寸实时调整所述跟踪摄像头的焦距,所述目标区域由用户在所述第一视频画面中选择,所述目标区域包括装载区域和卸载区域中的至少一个。
13、在一些实施例中,所述目标区域的尺寸包括所述目标区域的宽度,所述目标区域的宽度为所述目标区域在与塔机的水平臂架的延伸方向垂直的方向上的尺寸;所述跟踪摄像头的靶面的尺寸包括所述跟踪摄像头的靶面的宽度,所述跟踪摄像头的焦距与所述第一距离正相关,与所述靶面的宽度成正相关,与所述目标区域的宽度负相关。
14、在一些实施例中,所述跟踪摄像头的靶面的宽度和高度的比值为第一比值,所述第二视频画面的宽度和高度的比值为第二比值,所述跟踪摄像头的焦距还与调节系数负相关,所述调节系数为所述第一比值和第二比值的比。
15、根据本公开实施例的还一方面,提供一种辅助塔机作业的装置,包括:第一展示模块,被配置为将塔机的施工现场的第一视频画面展示在人机交互界面中;第一确定模块,被配置为响应于用户在所述第一视频画面中选择目标区域,确定所述目标区域的第一三维位置信息,所述目标区域包括装载区域和卸载区域中的至少一个;获取模块,被配置为获取塔机的吊钩在移动过程中的第二三维位置信息;第二确定模块,被配置为基于所述第一三维位置信息和所述第二三维位置信息,确定所述吊钩和所述目标区域的相对位置信息;第二展示模块,被配置为在所述吊钩移动的过程中,将所述相对位置信息和跟踪摄像头跟踪所述吊钩的第二视频画面展示在所述人机交互界面中以辅助作业,其中,在跟踪所述吊钩的过程中,根据所述吊钩与所述跟踪摄像头之间的第一距离、所述目标区域的尺寸和所述跟踪摄像头的靶面的尺寸实时调整所述跟踪摄像头的焦距。
16、根据本公开实施例的还一方面,提供一种辅助塔机作业的装置,包括:第三展示模块,被配置为将塔机的施工现场的第一视频画面展示在人机交互界面中;第四展示模块,被配置为在塔机的吊钩移动的过程中,将跟踪摄像头跟踪所述吊钩的第二视频画面展示在所述人机交互界面中以辅助作业,其中,在跟踪所述吊钩的过程中,根据所述吊钩与所述跟踪摄像头之间的第一距离、目标区域的尺寸和所述跟踪摄像头的靶面的尺寸实时调整所述跟踪摄像头的焦距,所述目标区域由用户在所述第一视频画面中选择,所述目标区域包括装载区域和卸载区域中的至少一个。
17、根据本公开实施例的还一方面,提供一种辅助塔机作业的装置,包括:存储器;以及耦接至所述存储器的处理器,所述处理器被配置为基于存储在所述存储器的指令执行上述任意一个实施例所述的方法。
18、根据本公开实施例的还一方面,提供一种辅助塔机作业的系统,包括:全景摄像机,被配置为采集塔机的施工现场的第一视频画面;跟踪摄像头,被配置为在所述吊钩移动的过程中采集跟踪所述吊钩的第二视频画面;和上述任意一个实施例所述的装置。
19、根据本公开实施例的还一方面,提供一种塔机,包括上述任意一个实施例所述的系统。
20、根据本公开实施例的还一方面,提供一种计算机可读存储介质,包括计算机程序指令,其中,所述计算机程序指令被处理器执行时实现上述任意一个实施例所述的方法。
21、根据本公开实施例的还一方面,提供一种计算机程序产品,包括计算机程序,其中,所述计算机程序被处理器执行时实现上述任意一个实施例所述的方法。
22、本公开实施例中,根据用户在第一视频画面中选择的目标区域,确定装载区域或卸载区域,并根据目标区域的第一三维位置信息和吊钩在移动过程中的第二三维位置信息计算相对位置信息并进行展示以起到辅助塔机作业的作用。负责控制吊钩的工作人员无需通过其他工作人员的指挥即可根据人机交互界面中展示的第一视频画面确定目标区域的位置,提高了塔机作业的效率;且目标区域和吊钩的位置确定依靠的是二者的三维位置信息,而不是通过施工现场的工作人员进行目测获取,提高了吊装的精确度,减少了安全隐患发生的可能性,提高了塔机作业的安全性。此外,通过基于吊钩与跟踪摄像头的距离、目标区域尺寸和跟踪摄像头靶面尺寸实时调整跟踪摄像头的焦距,使跟踪摄像头拍摄的第二视频画面更清晰,提高了视频的质量,便于工作人员从第二视频画面中获取更多吊钩吊装的目标物品的相关信息,进一步提高了塔机作业的效率和安全性。
23、下面通过附图和实施例,对本公开的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!