一种无菌物品运输用搬运机器人的制作方法
1.本实用新型涉及搬运机器人技术领域,尤其涉及一种无菌物品运输用搬运机器人。
背景技术:
2.在进行物品运输过程中一般会使用到搬运机器人,专利号为cn201921224946.0公开的一种自主导航搬运机器人,其通过物料架,可有效的防止物品,从而能够使得搬运机器人主体对物品进行搬运,同时,通过防滑垫,可有效的防止物品在搬运时,物品在物料架上滑动,提高了物品搬运的安全,通过无线控制主板,可有效的接收外界无线控制信号,从而能够控制搬运机器人主体自主导航运行,进而按照指定的路线搬运物品。
3.但上述专利公开的一种自主导航搬运机器人仍存在一定不足,由于在搬运物品中,物品可能重量较大,而上述搬运机器人缺乏缓冲结构,可能使得重物对搬运机器人本体造成一定损坏,且上述搬运机器人也不具备减震功能,当发生碰撞时,很有可能因震动较大而导致物品掉落。
技术实现要素:
4.本实用新型的目的是针对背景技术中存在的现有的运输用搬运机器人不具备缓冲减震功能的问题,提出一种具有缓冲减震功能的无菌物品运输用搬运机器人。
5.本实用新型的技术方案:一种无菌物品运输用搬运机器人,包括搬运机器人及装设于搬运机器人顶壁的缓冲减震盒,所述缓冲减震盒开设有空腔,且所述缓冲减震盒的空腔中设有物品摆放盒,所述物品摆放盒的两侧壁与相邻的所述缓冲减震盒的内腔侧壁之间均设有缓冲弹簧,所述物品摆放盒的底部设有减震机构。
6.优选的,所述减震机构包括固定套筒、活动杆、抵接块、减震弹簧b。
7.优选的,所述固定套筒固定安装于所述缓冲减震盒的内腔中部底壁,且所述固定套筒的内腔设有空腔,所述活动杆的杆体插接至所述固定套筒的空腔中,所述抵接块固定安装于所述活动杆的顶部杆体,且所述抵接块的顶壁与所述物品摆放盒的底壁相抵接。
8.优选的,所述减震弹簧b套设于所述活动杆的杆体表面,且所述减震弹簧b设于所述抵接块的底壁与所述固定套筒的顶壁之间。
9.优选的,所述固定套筒的两侧壁均固定安装有固定杆,固定杆的两端杆体均活动套设有活动块。
10.优选的,所述活动块的外侧设有减震弹簧a,且减震弹簧a套设于所述固定杆的杆体表面,所述活动块的一侧壁与所述物品摆放盒的底壁之间铰接有铰接杆,且相邻的铰接杆之间呈交叉设置。
11.与现有技术相比,本实用新型具有如下有益的技术效果:
12.通过设置缓冲弹簧,在物品摆放盒的底部设置减震结构,当搬运机器人承载重物时,活动杆下降使得减震弹簧a发生弹性形变,活动块挤压减震弹簧b使其发生弹性形变,从
而对承载的重物起到良好的缓冲减震效果,提升了无菌药品的运输稳定性。
附图说明
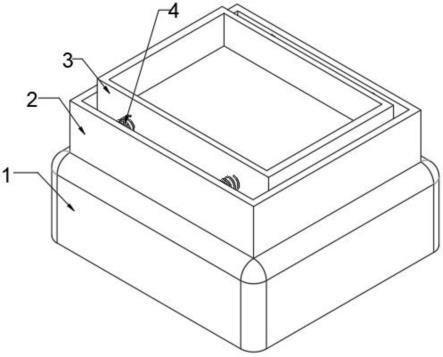
13.图1给出本实用新型一种实施例的立体结构示意图;
14.图2为图1的正视剖面结构示意图;
15.图3为图2的a处放大结构示意图。
16.附图标记:1-搬运机器人;2-缓冲减震盒;3-物品摆放盒;4-缓冲弹簧;5-铰接杆;6-固定杆;7-活动块;8-固定套筒;9-减震弹簧a;10-活动杆;11-抵接块;12-减震弹簧b。
具体实施方式
17.下文结合附图和具体实施例对本实用新型的技术方案做进一步说明。
18.实施例一
19.如图1-3所示,本实用新型提出的一种无菌物品运输用搬运机器人,包括搬运机器人1及装设于搬运机器人1顶壁的缓冲减震盒2,缓冲减震盒2开设有空腔,且缓冲减震盒2的空腔中设有物品摆放盒3,物品摆放盒3活动安装于缓冲减震盒2的空腔中。物品摆放盒3的前后两侧壁与相邻的缓冲减震盒2的内腔侧壁之间均连接有缓冲弹簧4,且缓冲弹簧4平行设置有两组,其目的是为了提升该搬运机器人1的运输稳定性。物品摆放盒3的底部设有减震机构用以对运输的物品进行减震。
20.本实施例中,通过设置缓冲弹簧4,在物品摆放盒的底部设置减震结构,当搬运机器人1承载重物时,减震机构可对承载重物的物品摆放盒3起到良好的缓冲减震效果,提升了无菌药品的运输稳定性,当该搬运机器人1受到碰撞而导致震动或者晃动时,使得缓冲弹簧4产生弹性形变,从而利用缓冲弹簧4的弹性形变产生的作用力将震动产生的作用力进行抵消,增强了的搬运机器人1的物品运输稳定性。
21.实施例二
22.如图1、图2、图3所示,本实用新型提出的一种无菌物品运输用搬运机器人,相较于实施例一,本实施例还包括减震机构包括固定套筒8、活动杆10、抵接块11、减震弹簧b12,固定套筒8固定安装于缓冲减震盒2的内腔中部底壁,且固定套筒8的内腔设有空腔,活动杆10的杆体插接至固定套筒8的空腔中,抵接块11固定安装于活动杆10的顶部杆体,且抵接块11的顶壁与物品摆放盒3的底壁相抵接,减震弹簧b12套设于活动杆10的杆体表面,且减震弹簧b12设于抵接块11的底壁与固定套筒8的顶壁之间,固定套筒8的左右两侧壁均固定安装有固定杆6,固定杆6的远离固定套筒8的一端的杆体固定安装于缓冲减震盒2的内腔侧壁。固定杆6的左右两端杆体均活动套设有活动块7,活动块7的外侧设有减震弹簧a9,远离固定杆6杆体中心处的一侧即为活动块7的外侧,且减震弹簧a9套设于固定杆6的杆体表面,活动块7的前侧壁与物品摆放盒3的底壁之间铰接有铰接杆5,且相邻的铰接杆5之间呈交叉设置。
23.本实施例中,当物品摆放盒3承载重物时,物品摆放盒3下压抵接块11,进而使得抵接块11挤压活动杆10,使得活动杆10的部分杆体回缩至固定套筒8的空腔中,在此过程中抵接块11将挤压减震弹簧b12,使得其发生弹性形变,进而其弹性形变产生的作用力将部分重力抵消,同时物品摆放盒3下降的过程中,由于铰接杆5的作用,使得铰接杆5推动活动块7向
外侧移动,并在移动的过程中挤压减震弹簧a9使其产生弹性形变,从而进一步物品摆放盒3受到的压力进行分摊。
24.上述具体实施例仅仅是本实用新型的几种优选的实施例,基于本实用新型的技术方案和上述实施例的相关启示,本领域技术人员可以对上述具体实施例做出多种替代性的改进和组合。
技术特征:
1.一种无菌物品运输用搬运机器人,包括搬运机器人(1)及装设于搬运机器人(1)顶壁的缓冲减震盒(2),其特征在于:所述缓冲减震盒(2)开设有空腔,且所述缓冲减震盒(2)的空腔中设有物品摆放盒(3),所述物品摆放盒(3)的两侧壁与相邻的所述缓冲减震盒(2)的内腔侧壁之间均设有缓冲弹簧(4),所述物品摆放盒(3)的底部设有减震机构。2.根据权利要求1所述的一种无菌物品运输用搬运机器人,其特征在于:所述减震机构包括固定套筒(8)、活动杆(10)、抵接块(11)、减震弹簧b(12)。3.根据权利要求2所述的一种无菌物品运输用搬运机器人,其特征在于:所述固定套筒(8)固定安装于所述缓冲减震盒(2)的内腔中部底壁,且所述固定套筒(8)的内腔设有空腔,所述活动杆(10)的杆体插接至所述固定套筒(8)的空腔中,所述抵接块(11)固定安装于所述活动杆(10)的顶部杆体,且所述抵接块(11)的顶壁与所述物品摆放盒(3)的底壁相抵接。4.根据权利要求3所述的一种无菌物品运输用搬运机器人,其特征在于:所述减震弹簧b(12)套设于所述活动杆(10)的杆体表面,且所述减震弹簧b(12)设于所述抵接块(11)的底壁与所述固定套筒(8)的顶壁之间。5.根据权利要求4所述的一种无菌物品运输用搬运机器人,其特征在于:所述固定套筒(8)的两侧壁均固定安装有固定杆(6),固定杆(6)的两端杆体均活动套设有活动块(7)。6.根据权利要求5所述的一种无菌物品运输用搬运机器人,其特征在于:所述活动块(7)的外侧设有减震弹簧a(9),且减震弹簧a(9)套设于所述固定杆(6)的杆体表面,所述活动块(7)的一侧壁与所述物品摆放盒(3)的底壁之间铰接有铰接杆(5),且相邻的铰接杆(5)之间呈交叉设置。
技术总结
本实用新型涉及搬运机器人技术领域,尤其涉及一种无菌物品运输用搬运机器人。主要解决了现有的运输用搬运机器人不具备缓冲减震功能的问题。其技术方案包括:搬运机器人及装设于搬运机器人顶壁的缓冲减震盒,缓冲减震盒开设有空腔,缓冲减震盒的空腔中设有物品摆放盒,物品摆放盒的两侧壁与相邻的缓冲减震盒的内腔侧壁之间均设有缓冲弹簧,物品摆放盒的底部设有减震机构。本实用新型通过设置缓冲弹簧,在物品摆放盒的底部设置减震结构,当搬运机器人承载重物时,活动杆下降使得减震弹簧A发生弹性形变,活动块挤压减震弹簧B使其发生弹性形变,从而对承载的重物起到良好的缓冲减震效果,提升了无菌药品的运输稳定性。主要应用于搬运机器人领域。用于搬运机器人领域。用于搬运机器人领域。
技术研发人员:张丽
受保护的技术使用者:上海康誉生物科技有限公司
技术研发日:2022.05.05
技术公布日:2022/12/30
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1