一种新型多卷智能拉布机构的制作方法
1.本实用新型涉及拉布机技术领域,具体是一种新型多卷智能拉布机构。
背景技术:
2.拉布机,是一种上世纪90年代初出现的制作布的机器。由于柔性材料,大部分是成卷生产、成卷运输,因此到了用户工厂,一个重要的工序是需要把卷状物料变成多层的平面状态,才能方便裁剪使用。自动拉布机、自动铺布机这样的自动化生产设备就应运而生了。市面现有经常使用的拉布机只能抓单层布匹,如:专利cn2018114887165一种使用稳定的自动拉布机及布料平整方法,在将布料铺设在操作平台上时,拉布机将成卷布料逐层平铺在操作平台上,压紧机构将布料压紧,此时第一固定杆、第二固定杆分别和布料表面相抵触,由于第一固定杆、第二固定杆均倾斜设置,第一固定杆对布料施加向第一安装杆方向移动的作用下,第二固定杆对布料施加向第二安装杆方向移动的作用力,即第一固定杆和第二固定杆对布料的两侧施加相反的作用力,从而实现对布料表面褶皱的抚平,并实现对布料卷边的展平,使布料平整的铺设在操作平台上,提高了自动拉布机使用的稳定性。
3.而且现有的拉布机中,在抓布过程中由于抓布位置(高度)无法统一,从而产生误差积累,抓布过程中的误差积累会导致布头无法裁剪整齐,人工调整会导致效率降低,并且机械操作无法实现多层铺布,存在效率低,布头裁剪不整齐,不能拉多层等缺陷,因此需要对其技术进行改进。
技术实现要素:
4.本实用新型的目的是为了克服现有技术存在的缺陷和不足,提供一种新型多卷智能拉布机构,解决了现有技术中存在的种种问题。
5.为实现上述目的,本实用新型提供如下技术方案:
6.一种新型多卷智能拉布机构,包括有操作平台,所述操作平台的进料端架设有固定机头,所述操作平台上安装有可移动的移动机头,所述固定机头包括有位于操作平台两侧的固定座,所述固定座的内侧面上分别安装有可升降的导板一,所述导板一的内侧面上分别固定有导板二,所述导板二的前端部设置有向出料端延伸的导向凸板,所述导向凸板的上端面为台阶面,台面面的前端部为斜坡面,所述移动机头包括有移动座,所述移动座的底端设置有行走滚轮,所述移动座的内侧安装有可导向移动的导板三,所述导板三的后端部内侧安装有沿导向凸板上端面导向滚动配合的滚轮一。
7.所述导板二之间通过横梁一连接固定,所述横梁一的下方连接有可升降的上夹板,所述上夹板对应的操作平台上固定安装有下夹板,所述上夹板的升降通过气缸驱动,所述气缸的缸体端通过连接座与横梁一连接,所述气缸的活塞杆伸出端与上夹板连接。
8.所述导板一的内侧面上分布有竖向导轨一,所述导板一的外侧面上安装有与竖向导轨一两侧导向配合的滚轮二,所述导板一侧升降通过固定座内的链轮链条组件一驱动。
9.所述链轮链条组件一包括有安装在导板一内侧的上下间隔设置的链轮,所述链轮
之间通过链条传动连接,所述链轮的转动通过其一链轮外端部的电机驱动,所述链条上设有连接块,所述连接块与导板一连接,所述固定座的内侧面上设有供连接块导向的导槽。
10.所述移动座的内侧面上分布有竖向导轨二,所述导板三的外侧面上安装有与竖向导轨二两侧导向配合的滚轮三,所述导板三的移动与导板一的驱动方式相同,所述移动座的前端部底端安装有抓布夹。
11.所述固定座和移动座上分别安装有天线和信号控制单元,通过无线通讯设备的交互,实现移动机头与固定机头的通信,实现移动机构的滚轮在固定机头的导向凸板上滚动,保证水平同一高度,抓布位置同步,自动弥补落差。
12.所述抓布爪包括有底部抓布爪和上部抓布爪,所述底部抓布爪固定在导板三之间的固定梁上,所述上部抓布爪固定在导板三之间的转轴上,所述转轴位于固定梁的正上方,所述转轴上安装有的端部安装有齿轮,所述转轴的转动通过一侧的电机驱动,所述上部抓布夹上安装有磁粉张力控制器,实现底部抓布爪和上部抓布爪的张力可调。
13.其原理是:固定机头的导板一和移动机头的导板三的升降均是通过电动驱动,实现进料端和出料端高低可调,可以同时抓取多层布料,虽然能够满足位置的要求,但在使用过程中,直接驱动自动上升过程中会产生一定的落差,长期工作会产生一定的误差累积,通本技术中通过导向导板与移动座上的滚轮一进行导向配合,当移动机头进行夹布时固定机头可对其高度位置进行限位辅助导向,使得移动机构的抓布夹永远处于同一高度,从而保证抓布位置统一,而且能够自动弥补落差,并且布头裁剪整齐,提高效率,满足使用要求。
14.与现有技术相比,本实用新型的有益效果是:
15.本实用新型结构设计合理,通过滚轮一沿导向凸板上端面进行导向滚动,实现移动机头进行夹布时固定机头可对其高度位置进行限位辅助导向,使得移动机构的抓布夹永远处于同一高度,从而保证抓布位置统一,而且能够自动弥补落差,并且布头裁剪整齐,提高效率,满足使用要求。
附图说明
16.图1为本实用新型的结构示意图。
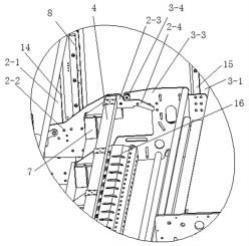
17.图2为图1中a处的局部结构放大图。
18.图3为本实用新型另一角度的结构示意图。
19.图4为去掉导板一、导板二、导板三后固定机头和移动机头端头处的结构示意图。
20.附图标记:
21.1、操作平台;2、固定机头;3、移动机头;2-1、固定座;2-2、导板一;2-3、导板二;2-4、导向凸板;3-1、移动座;3-2、行走滚轮;3-3、导板三;3-4、滚轮一;4、横梁一;5、上夹板;6、下夹板;7、气缸;8、竖向导轨一;9、滚轮二;10、链轮链条组件一;11、链轮;12、链条;13、连接块;14、导槽;15、竖向导轨二;16、抓布爪;16-1、底部抓布爪;16-2、上部抓布爪;16-3、转轴。
具体实施方式
22.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下
所获得的所有其他实施例,都属于本实用新型保护的范围。
23.参见附图1-4;
24.一种新型多卷智能拉布机构,包括有操作平台1,操作平台1的进料端架设有固定机头2,操作平台1上安装有可移动的移动机头3,固定机头2包括有位于操作平台两侧的固定座2-1,固定座2-1的内侧面上分别安装有可升降的导板一2-2,导板一2-2的内侧面上分别固定有导板二2-3,导板二2-3的前端部设置有向出料端延伸的导向凸板2-4,导向凸板2-4的上端面为台阶面,台面面的前端部为斜坡面,移动机头3包括有移动座3-1,移动座3-1的底端设置有行走滚轮3-2,移动座3-1的内侧安装有可导向移动的导板三3-3,导板三3-3的后端部内侧安装有沿导向凸板2-4上端面导向滚动配合的滚轮一3-4。
25.进一步,导板二2-3之间通过横梁一4连接固定,横梁一4的下方连接有可升降的上夹板5,上夹板5对应的操作平台上固定安装有下夹板6,上夹板5的升降通过气缸7驱动,气缸7的缸体端通过连接座与横梁一4连接,气缸7的活塞杆伸出端与上夹板5连接。通过气缸驱动上夹板移动从而控制布头的夹紧度,用于固定端头,当抓布夹移动过程中,气缸收缩驱动上夹板向上移动,从而不影响抓布夹的拉布过程,抓布夹移动到位之后,此时气缸伸出驱动上夹板向下移动,对此时位置的布料进行夹紧,从而实现对布头的定位,为下次拉布进行准确的定位。
26.进一步,导板一2-2的内侧面上分布有竖向导轨一8,导板一2-2的外侧面上安装有与竖向导轨一8两侧导向配合的滚轮二9,导板一2-2侧升降通过固定座内的链轮链条组件一10驱动。述链轮链条组件一10包括有安装在导板一2-2内侧的上下间隔设置的链轮11,链轮之间通过链条12传动连接,链轮11的转动通过其一链轮外端部的电机驱动,链条12上设有连接块13,连接块13与导板一2-2连接,固定座2-1的内侧面上设有供连接块13导向的导槽14。高度通过电机带动链轮转动,从而实现链条带动连接块移动,导板二沿着固定座的竖向导轨一进行导向移动,导向移动过程中通过滚轮二与竖向导轨一的两侧进行限位导向,保证了导板二在升降过程中的稳定性。
27.进一步,移动座3-1的内侧面上分布有竖向导轨二15,导板三3-3的外侧面上安装有与竖向导轨二15两侧导向配合的滚轮三,导板三3-3的移动与导板一2-2的驱动方式相同,移动座3-1的前端部底端安装有抓布爪16。导板三的升降高度位置与导板二的升降导向方式一样。抓布爪16包括有底部抓布爪16-1和上部抓布爪16-2,底部抓布爪16-1固定在导板三3-3之间的固定梁上,上部抓布爪16-2固定在导板三3-3之间的转轴16-3上,转轴16-3位于固定梁的正上方,转轴上安装有的端部安装有齿轮,转轴的转动通过一侧的电机驱动,上部抓布爪16-2上安装有磁粉张力控制器,实现底部抓布爪和上部抓布爪的张力可调。通过电机驱动齿轮转动,齿轮转动带动转轴转动,转轴带动上部抓布爪转动,从而实现夹布的过程,通过磁粉张力控制器,可根据需要对上部抓布爪的张力进行调整控制。
28.进一步,固定座2-1和移动座3-1上分别安装有天线和信号控制单元,通过无线通讯设备的交互,实现移动机头与固定机头的通信,实现移动机构的滚轮在固定机头的导向凸板上滚动,保证水平同一高度,抓布位置同步,自动弥补落差。通过在进料端和出料端分别设置天线及信号控制单元,通过无线通讯设备的交互,从而实现移动机头出料端与固定机头进料端的通信;另外两个机头通过攀爬连接结构,能够同时保证水平同一高度,抓布位置统一,自动弥补落差。抓布夹磁粉张力控制器,张力可调,实现同时拉六层到十层,实现多
层铺布,从而提升1.5-2倍的效率。固定机头为气动装置,移动机头为电动装置,两个机头上各安置一个天线,实现无线通讯。固定机头与移动机头通过攀爬连接,保证位置的固定,不易产生误差。
29.虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
30.故以上所述仅为本技术的较佳实施例,并非用来限定本技术的实施范围;即凡依本技术的权利要求范围所做的各种等同变换,均为本技术权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1