一种用于全自动智能灌装产线的码垛机的制作方法
1.本实用新型涉及一种用于全自动智能灌装产线的码垛机。
背景技术:
2.现有的智能灌装产线的码垛机大多采用对称式设计,即码垛机一般包含对称的抓桶机构,以确保码垛机的平衡,而码垛机在工作时需要旋转完整的一圈,因此上述设置方式导致码垛机工作时的覆盖范围极大,因而产线的整体占地面积就会随之上升。
技术实现要素:
3.本实用新型的目的是提供一种用于全自动智能灌装产线的码垛机,其占地面积小能够在小范围内实现灌装桶的码垛,且整体重心与其主体部分的物理中心靠近,在运行时较为平稳。
4.为达到上述目的,本实用新型采用的技术方案是:一种用于全自动智能灌装产线的码垛机,其包括驱动装置以及夹持定位装置,所述夹持定位装置包括用于夹取灌装桶的抓桶部、以及用于抓取放置在各层灌装桶之间的支撑板的抓板部;所述驱动装置包括底座、转动连接于所述底座上的机架,所述机架具有垂直于底座的左侧壁、右侧壁、前侧壁和后侧壁,所述驱动装置还包括用于驱动所述抓桶部沿所述机架的左侧壁上下运动的第一驱动部、用于驱动所述抓板部沿所述机架的前侧壁上下运动的第二驱动部以及用于驱动所述机架在所述底座上转动的第三驱动部,所述机架与所述底座相对转动的轴线为第一轴线,所述第一驱动部的分布于所述第一轴线的左右两侧,所述第二驱动部与所述第三驱动部分布于所述第一轴线的前后两侧。
5.优化的,所述第一驱动部包括设置在所述机架的左侧壁的外侧的第一外滑动组件,设置在机架右侧壁上的第一内配重组件,连接于所述第一外滑动组件和所述第一内配重组件之间的第一传动件,直接带动所述第一传动件或第一外滑动组件或第一内配重组件运动的第一电机,所述抓桶部安装于所述第一外滑动组件上。
6.优化的,所述第一外滑动组件包括沿垂直所述底座的方向设置在所述机架的左侧壁的外侧的第一外导轨、滑动连接于所述第一外导轨上的第一外滑块、固定于所述第一外滑块上的第一外安装座。
7.优化的,所述第一内配重组件包括沿垂直所述底座的方向设置在所述机架的右侧壁上的第一内导轨、滑动连接于所述第一内导轨上的第一内滑块、固定于所述第一内滑块上的第一配重块。
8.优化的,所述第一传动件包括安装于所述机架左侧壁上且位于所述第一外导轨上方第一外换向轮,安装于所述机架右侧壁上且位于所述第一内导轨上方第一内换向轮,一端固定于所述第一内配重组件上且另一端依次绕过第一内换向轮和第一外换向轮后与所述第一外滑动组件固定连接的第一传动链条,所述第一电机上安装有第一齿轮箱组件,第一齿轮箱组件与所述第一传动链条啮合。
9.优化的,所述第二驱动部包括沿垂直所述底座的方向设置在所述机架前侧壁上的第二外导轨、滑动连接于所述第二外导轨上的第二外滑块、固定于所述第二外滑块上的第二外安装座、安装于所述机架上且位于所述第二外导轨上方的第二上换向轮、安装于所述机架上且位于所述第二外导轨下方的第二下换向轮、一端固定于所述第二外安装座的上方且另一端绕过所述第二上换向轮和第二下换向轮后固定于所述第二外安装座的下方的第二传动链条、安装于所述机架上的第二电机,所述第二电机上安装有第二齿轮箱组件,第二齿轮箱组件与所述第二传动链条啮合。
10.优化的,第三驱动部包括固定于底座的上的回转支承、安装于机架上的第三电机、连接于第三电机上的减速机、连接于减速机和回转支承之间的第三齿轮组件,回转支承包括与机架固定连接的内圈、套设于内圈外且与底座固定连接的外圈,回转支承外圈的外周面上布满轮齿,所述外圈上的轮齿与第三齿轮组件啮合。
11.优化的,所述轴承包括与所述机架固定连接的内圈、套设于所述内圈外且与所述底座固定连接的外圈,所述定齿轮环设于所述外圈的外周面上。
12.优化的,所述抓桶部包括第一挂臂、安装于所述第一挂臂上的若干第一挂接板、第一定位爪,所述第一定位爪包括若干个穿设于所述第一挂接板上且可上下滑动的第一滑杆、固定于各个所述第一滑杆上端部的防脱盖、固定于各个所述第一滑杆下端部的定位套、固定于各个所述第一滑杆中部且与所述第一滑杆垂直设置的第一连杆、转动连接于所述第一连杆两端部的第一摆杆、固定于所述第一滑杆同一侧的第一摆杆上且与所述第一挂接板相平行设置的第一卡爪、连接于所述第一卡爪之间的第一气缸,所述第一卡爪的下部形成朝向第一滑杆延伸的卡接部,当所述第一气缸收缩后,所述第一卡爪收缩夹紧灌装桶。
13.优化的,所述抓板部包括第二挂臂、固定于所述第二挂臂上的第二挂接板、设于所述第二挂接板上的若干吸盘组件、转动连接于所述第二挂接板上且分布于所述吸盘组件外周的收拢卡爪、安装于所述第二挂接板上用于带动所述收拢卡爪摆动的第二气缸。
14.由于上述技术方案运用,本实用新型与现有技术相比具有下列优点:本实用新型将抓桶部和抓板部大致呈直角位置布置,并将第三驱动部布置在抓桶部和抓板部的相对侧,确保在抓桶码垛时,码垛机整体的平衡与稳定。
附图说明
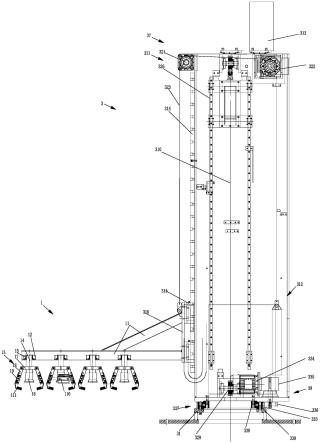
15.附图1为码垛机的主视图;
16.附图2为码垛机的右视图;
17.附图3为驱动部的俯视图;
18.附图4为抓桶部的结构示意图;
19.附图5为抓板部的结构示意图。
具体实施方式
20.下面结合附图所示的实施例对本实用新型作进一步描述。
21.如图1-5所示,用于全自动智能灌装产线的码垛机,其包括驱动装置以及夹持定位装置,夹持定位装置包括用于夹取灌装桶的抓桶部1、以及用于抓取放置在各层灌装桶之间的支撑板的抓板部2;驱动装置包括底座31、转动连接于底座31上的机架32,机架32具有垂
直于底座31的左侧壁33、右侧壁34、前侧壁35和后侧壁36,驱动装置还包括用于驱动抓桶部1沿机架32的左侧壁33上下运动的第一驱动部37、用于驱动抓板部2沿机架32的前侧壁35上下运动的第二驱动部38以及用于驱动机架32在底座31上转动的第三驱动部39,机架32与底座31相对转动的轴线为第一轴线310,第一驱动部37的分布于第一轴线310的左右两侧,第二驱动部38与第三驱动部39分布于第一轴线310的前后两侧。
22.第一驱动部37包括设置在机架32的左侧壁33的外侧的第一外滑动组件311,设置在机架32右侧壁34上的第一内配重组件312,连接于第一外滑动组件311和第一内配重组件312之间的第一传动件320,直接带动第一传动件320或第一外滑动组件311或第一内配重组件312运动的第一电机313,抓桶部1安装于第一外滑动组件311上。第一外滑动组件311包括沿垂直底座31的方向设置在机架32的左侧壁33的外侧的第一外导轨314、滑动连接于第一外导轨314上的第一外滑块315、固定于第一外滑块315上的第一外安装座316,抓桶部1安装于第一外安装座316上。第一内配重组件312包括沿垂直底座31的方向设置在机架32的右侧壁34上的第一内导轨317、滑动连接于第一内导轨317上的第一内滑块318、固定于第一内滑块318上的第一配重块319。第一传动件320包括安装于机架32左侧壁33上且位于第一外导轨314上方第一外换向轮321,安装于机架32右侧壁34上且位于第一内导轨317上方第一内换向轮322,一端固定于第一内配重组件上且另一端依次绕过第一内换向轮322和第一外换向轮321后与第一外滑动组件311固定连接的第一传动链条323,第一电机313上安装有第一齿轮箱组件324,第一齿轮箱组件324内孔穿入第一传动轴3241,第一传动轴3241上安装第一内换向轮322,第一内换向轮322与传动链条323啮合。
23.第二驱动部38包括沿垂直底座31的方向设置在机架32前侧壁35上的第二外导轨325、滑动连接于第二外导轨325上的第二外滑块326、固定于第二外滑块326上的第二外安装座327、安装于机架32上且位于第二外导轨325上方的第二上换向轮328、安装于机架32上且位于第二外导轨325下方的第二下换向轮329、一端固定于第二外安装座的327上方且另一端绕过第二上换向轮328和第二下换向轮329后固定于第二外安装座327的下方的第二传动链条330、安装于机架32上的第二电机331,第二电机331上安装有第二齿轮箱组件332,第二齿轮箱组件332内孔穿入第二传动轴3321,第二传动轴3321上安装第二上换向轮328,第二上换向轮328与第二传动链条330啮合,抓板部2安装于第二外安装座327上。
24.第三驱动部39包括固定于底座31的上的回转支承333、安装于机架32上的第三电机334、连接于第三电机334上的减速机335、连接于减速机335和回转支承333之间的第三齿轮组件336,回转支承333包括与机架32固定连接的内圈338、套设于内圈338外且与底座31固定连接的外圈339,回转支承333外圈339的外周面上布满轮齿,轮齿与第三齿轮组件336啮合。
25.抓桶部1包括第一挂臂11、安装于第一挂臂11上的若干第一挂接板12、第一定位爪13,第一定位爪13包括若干个穿设于第一挂接板12上且可上下滑动的第一滑杆14、固定于各个第一滑杆14上端部的防脱盖15、固定于各个第一滑杆14下端部的定位套16、固定于各个第一滑杆14中部且与第一滑杆14垂直设置的第一连杆17、转动连接于第一连杆17两端部的第一摆杆18、固定于第一滑杆14同一侧的第一摆杆18上且与第一挂接板12相平行设置的第一卡爪19、连接于第一卡爪19之间的第一气缸110,第一卡爪19的下部形成朝向第一滑杆14延伸的卡接部111,当第一气缸110收缩后,第一卡爪19收缩夹紧灌装桶。由于第一滑杆14
相对于第一挂臂11在水平方向的位置固定且能在竖直方向移动,定位套16与第一滑杆14相对固定,即定位套16相对于第一挂臂11在水平方向的位置固定且能在竖直方向移动,因此在定位套16套设在桶的上端部并下行的过程中能校正桶在水平方向上的位置,由于其具有一定向上移动的余量,能防止抓桶部1在下行时定位套16压坏桶。
26.抓板部2包括第二挂臂21、固定于第二挂臂21上的第二挂接板22、设于第二挂接板22上的若干吸盘组件23、转动连接于第二挂接板22上且分布于吸盘组件23外周的收拢卡爪24、安装于第二挂接板22上用于带动收拢卡爪24摆动的第二气缸25。抓板部2同时装有吸盘组件23和收拢卡爪24,可以根据需要吸取平板状的支撑板或抓取用于定位的套板式的支撑板。
27.上述实施例只为说明本实用新型的技术构思及特点,其目的在于让熟悉此项技术的人士能够了解本实用新型的内容并据以实施,并不能以此限制本实用新型的保护范围。凡根据本实用新型精神实质所作的等效变化或修饰,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1