一种输送接料装置的制作方法
1.本实用新型涉及上料设备领域,尤其涉及一种自动吸料送料机构。
背景技术:
2.在生产或生活中,一些家电或者生产设备,经常需要实现自动取料、输料并送料的功能。
3.公告号为cn204264884u的中国专利公开洗碗机箱体输送接料装置,包括输送翻转装置和接料装置,接料装置设置于输送翻转装置末端,输送翻料装置包括顶部支架,顶部支架上安装顶部滑轨,顶部滑轨上滑动安装悬挂支撑座,顶部支架上安装输送驱动气缸,输送驱动气缸的活塞杆连接所述悬挂支撑座,悬挂支撑座两端分别安装箱体夹持架,箱体夹持架上安装夹持气缸,夹持气缸的活塞杆连接夹持座,夹持板上安装真空吸盘。
4.上述结构中,悬挂支撑座的移动受控于驱动气缸的伸缩,这就导致,悬挂支撑座移动精度较低,对于一些精密仪器中,设置气缸的驱动方式显然无法满足对精度的要求。
技术实现要素:
5.本实用新型针对现有技术利用气缸驱使部件移动的方式存在精度低的缺点,提供了一种能够增加控制精度的输送接料装置。
6.为了解决上述技术问题,本实用新型通过下述技术方案得以解决:
7.一种输送接料装置,包括架体,架体上沿其长度方向导向滑移设置有一移动座,移动座上设置有可拿取或释放物料的抓料部,移动座的移动受控于一带传输机构,带传输机构包括于架体两端转动设置的从动轮、设置于两从动轮之间呈三角分布的驱动轮以及分布于从动轮和驱动轮上驱使三者同步转动的同步带,同步带与移动座固定连接,在架体上设置有驱使驱动轮转动的第一控制电机。
8.采用上述方案,利用第一控制电机的转动带动驱动轮转动从而驱使同步带移动,同步带的移动带动与同步带固定的移动座移动,实现抓料部的移动,利用第一控制电机可以掌握移动座的移动距离,通过第一电机正反转的切换,可以实现移动座的往复移动,可以根据移动座的行程调节同步带的长度、架体的长度以及驱动轮和从动轮之间的间距,相较于气缸,控制精度显著增加,可以做到随行随止,可适用长距离传输。
9.作为优选,在架体上设置有可调节同步带张紧程度的张紧机构。
10.采用上述方案,张紧机构可避免同步带松弛,确保驱动轮的转动能够带动从动轮转动以及同步带的移动。
11.作为优选,张紧机构包括于架体上沿其长度方向设置的导槽、可沿导槽导向滑移并自转的张紧轮以及驱使张紧轮在仅能自转或可同步移动并自转之间进行切换的切换机构,同步带与张紧轮配合且随着张紧轮的移动调节张紧程度。
12.采用上述方案,利用切换机构可改变张紧轮在导槽内的移动距离,从而改变同步带的张紧程度,当同步带出现松弛时,可以及时调节以确保同步带始终处于张紧状态。
13.作为优选,切换机构包括沿导槽导向滑移的滑块、于滑块上设置的与导槽对应的螺纹槽以及穿过导槽与螺纹槽紧配的锁紧件,张紧轮转动设置于滑块上。
14.采用上述方案,滑块通过锁紧件可夹紧限位在架体的一侧或两侧上,实现滑块在架体上的限位,这样就确保了张紧后的同步带始终保持在张紧状态,而张紧轮转动设置在滑块上,能够确保同步带的流畅移动,确保移动座的流畅移动。
15.作为优选,张紧轮设置有至少一个。
16.采用上述方案,张紧轮设置一个以上,可以实现同步带的多重绕设,提高张紧效果。
17.作为优选,移动座通过第一导向机构滑移设置于架体上,第一导向机构包括在架体下端沿架体长度方向平行设置的两导杆,移动座上设置有两分别与两导杆导向配合的导孔,移动座上端面与同步带固定连接。
18.采用上述方案,移动座通过两导杆导向滑移,滑移稳定且流畅,移动座上端可预留空间便于与同步带连接。
19.作为优选,抓料部包括固定于移动座上的至少一个真空吸盘,真空吸盘通过气管与气泵连接。
20.采用上述方案,抓料部通过真空吸盘的吸力改变实现对物体的吸取或释放。
21.作为优选,架体导向升降设置于一固定架下方,在固定架上设置有控制架体升降的驱动部。
22.采用上述方案,利用驱动部,可实现架体沿固定架的升降,从而实现抓料部的升降。
23.作为优选,驱动部包括竖直固定于架体上端的齿条、转动设置于固定架上且与齿条啮合的齿轮以及驱使齿轮转动的第二控制电机,在固定架上设置有驱使齿条与齿轮处于啮合状态的配合部。
24.采用上述方案,利用第二控制电机驱使齿轮转动实现齿条的升降,从而带动架体的升降,最终实现抓料部的升降。
25.作为优选,配合部包括在固定架上沿齿条竖直方向间隔转动设置的至少一个与齿条远离齿轮的一侧抵压的抵压轮。
26.采用上述方案,利用抵压轮在实现对齿条的水平限位的同时,减少其与齿条之间的摩擦力,促进齿条的流畅移动。
27.本实用新型由于采用了以上技术方案,具有显著的技术效果:
28.1.利用第一控制电机的转动带动驱动轮转动从而驱使同步带移动,同步带的移动带动与同步带固定的移动座移动,实现抓料部的移动,利用第一控制电机可以掌握移动座的移动距离,通过第一电机正反转的切换,可以实现移动座的往复移动,可以根据移动座的行程调节同步带的长度、架体的长度以及驱动轮和从动轮之间的间距,相较于气缸,控制精度显著增加,可以做到随行随止,可适用长距离传输。
29.2.设置张紧机构,该张紧机构包括切换机构,利用切换机构可改变张紧轮在导槽内的移动距离,从而改变同步带的张紧程度,当同步带出现松弛时,可以及时调节以确保同步带始终处于张紧状态。
30.3.设置驱动部,实现架体相对固定架的升降,从而实现抓料部高度的调节。
附图说明
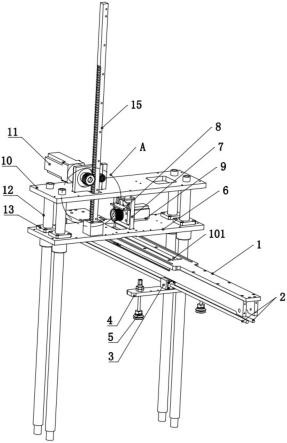
31.图1是本实施例的一种输送接料装置的轴测图;
32.图2是图1的a的放大图;
33.图3是本实施例的一种输送接料装置的主视图;
34.图4是图3的a-a的剖视图;
35.图5是图4的b的放大图;
36.图6是是本实施例的架体的轴测图;
37.图7是图6的c的放大图。
38.以上附图中各数字标号所指代的部位名称如下:1、架体;101、让位槽;102、导槽;103、容置槽;2、导杆;3、移动座;4、安装板;5、真空吸盘;51、气管;6、固定板;7、轴承座;8、驱动轮;9、第一控制电机;10、固定架;11、第二控制电机;12、导柱;13、导套;14、齿轮;15、齿条;16、抵压轮;17、从动轮;18、张紧轮;19、同步带;20、压块;21、紧固螺钉;22、滑块;23、连接轴;24、螺纹槽;25、紧固螺栓;26、配合板。
具体实施方式
39.下面结合附图与实施例对本实用新型作进一步详细描述。
40.实施例
41.一种输送接料装置,参照图1和图3所示,包括固定架10以及竖直导向升降于固定架10下方的架体1,架体1通过第二导向机构实现导向,且通过驱动部实现升降,在架体1上沿架体1长度方向导向滑移有一移动座3,移动座3的滑移受控于一带传输机构,在移动座3下端垂直固定有一安装板4,在安装板4上设置有可抓取或释放物料的抓料部,抓料部为两竖直固定于安装板4两侧的真空吸盘5,真空吸盘5通过气管51与气泵(未示出)连接。
42.在架体1下端向上凹陷有一贯穿架体1两端的容置槽103,参照图4和图6所示,容置槽103的上端设置有贯穿的让位槽101,带传输机构包括在架体1两端于容置槽103内转动设置的两从动轮17,在安装板4上端固定设置有第一控制电机9,第一控制电机9的电机轴上同轴固定有驱动轮8,在安装板4上竖直固定有一支撑电机轴的轴承座7,两从动轮17和驱动轮8之间通过同步带19实现同步,让位槽101的设置可供同步带19穿入容置槽103与从动轮17配合,驱动轮8和两从动轮17呈三角分布,结合图5所示,移动座3上端设置有一压块20,当同步带19局部位于压块20和移动座3之间后,利用紧固螺钉21穿过压块20和同步带19后与移动座3锁紧的方式将同步带19与移动座3固定,第一控制电机9为伺服电机,当第一控制电机9正转或反转时,就能带动同步带19正转或反转,实现移动座3的往复移动。
43.为了避免同步带19出现松弛现象,在架体1上设置有可调节同步带19张紧程度的张紧机构,结合图7所示,张紧机构包括于容置槽103的两侧沿其长度方向设置的导槽102,在容置槽103内设置有与两导槽102导向滑移的滑块22,滑块22之间通过连接轴23转动设置有张紧轮18,张紧轮18沿导槽102的长度方向平行设置有两个,张紧轮18为滚珠轴承,滚珠轴承滚动流畅且使用寿命长,滚珠轴承的内圈与连接轴23固定连接,滚珠轴承的外圈与同步带19配合,在滑块22和架体1之间设置有可实现滑块22移动或限位的切换机构,切换机构包括于滑块22的两侧设置的与导槽102正对的螺纹槽24,利用紧固螺栓25穿过导槽102后与螺纹槽24紧配,当紧固螺栓25的头部抵接在架体1的两侧后实现滑块22在导槽102上的锁
止,同步带19的布设可参照图4所示,随着滑块22在导槽102内位置的变化,可以改变同步带19的张紧程度,确保同步带19始终处于张紧状态。
44.参照图1所示,第二导向机构包括于架体1下端面四角处竖直固定设置的导柱12,架体1上端面垂直固定有一固定板6,固定板6的四角处对应设置有可供导柱12导向穿过的导套13。
45.结合图2所示,驱动部包括竖直固定于固定板6上端面的齿条15,固定架10上设置有可供齿条15穿过的过槽,在固定架10上端面固定有一与齿条15啮合的齿轮14,该齿轮14同轴固定于第二控制电机11的电机轴上,第二控制电机11固定在固定架10上端面,第二控制电机11为伺服电机,上述齿轮14为斜齿轮14,齿条15为斜齿条15,在固定架10上端面竖直固定有一配合板26,在配合板26上设置有驱使齿条15与齿轮14保持啮合状态的配合部,该配合部包括转动设置于配合板26上且与齿条15远离齿轮14的一侧抵压的抵压轮16,抵压轮16竖直间隔设置有至少一个,该抵压轮16为一滚珠轴承,滚珠轴承的内圈通过一轴与配合板26固定,且滚珠轴承的外圈与齿条15远离齿轮14的一侧滚动配合,通过该抵压轮16可驱使齿轮14始终与齿条15啮合且流畅升降。
46.第一控制电机9和第二控制电机11与plc控制器连接,当需要真空吸盘吸附产品并输送至下一工序释放时,先根据产品高度调节吸盘的高度,即驱使第二控制电机11转动至齿条15升降至所需高度(真空吸盘5下端与物料贴合或符合可吸附的吸附间隙);接着,驱使第一控制电机9正转,移动座移动至产品堆垛处,真空吸盘5负压增大,吸附产品;接着,第一控制电机9反转,移动座反向移动至产品释放工位;最后,真空吸盘5恢复常压,释放产品,通过第一控制电机9转动方向的变化,就能实现真空吸盘5的水平往复移动,通过第二控制电机11转动方向的变化,就能实现真空吸盘5高度的调节,真空吸盘5的吸附或释放为现有技术,原理不再赘述,本方案中,利用带传输机构和张紧机构,能够实现真空吸盘5远距离传输,且通过伺服电机转动行程可以控制真空吸盘5的移动精度,在具备移动精度的同时适应远距离传输。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1