一种自动避障移动装置以及垃圾桶的制作方法
1.本实用新型属于家居产品技术领域,特指一种自动避障移动装置以及垃圾桶。
背景技术:
2.现有垃圾桶都是固定置于房间的某一角落,用户在丢垃圾时需要起身靠近垃圾桶进行丢放,使用起来不够方便。
技术实现要素:
3.本实用新型的目的是提供一种自动避障移动装置以及垃圾桶。
4.本实用新型的目的是这样实现的:
5.一种自动避障移动装置,包括:
6.基座;
7.移动部件,设置在基座中,用于带动基座移动;
8.感应部件,周向设置在基座上,用于检测位于基座外沿是否存在阻挡物;以及
9.主控组件,设置在基座中,其电性连接所述移动部件与感应部件;主控组件用于当所述感应部件检测到阻挡物时,控制移动部件来使基座避让外界阻挡物。
10.进一步地,所述移动部件包括:
11.若干动力轮,设置在基座的一端上,所述基座上设有驱动动力轮转动的动力组件;以及
12.若干转向轮,设置在基座的一端上,所述基座上设有改变转向轮朝向的摆转组件;
13.所述主控组件分别控制动力组件以及摆转组件来使动力轮与转向配合动作,来使基座避让外界阻挡物。
14.进一步地,所述摆转组件包括:
15.摆转电机,固定在所述基座上;
16.联动杆,联动杆连接所述摆转电机,并由所述摆转电机带动做横向运动;以及
17.摇杆,摇杆的一端连接所述联动杆,另一端连接所述转向轮,摇杆的中部设有转动节;
18.当所述摆转电机工作时,摆转电机带动所述联动杆做横向运动,通过摇杆来改变转向轮朝向。
19.进一步地,所述基座上摆动设有摆动块,摆动块的一端设有联动齿,所述摆转电机带动有与所述联动齿啮合的驱动齿轮;
20.所述摆动块与联动杆上分别设有导向槽与导向销,所述导向销滑动位于所述导向槽内。
21.进一步地,所述摆转电机上设有护盖,护盖左右两端设有延伸臂,延伸臂的端部设有连接在所述摇杆中部上的转动节。
22.进一步地,所述动力组件包括驱动电机,驱动电机驱动在基座上,驱动电机的两端
通过传动轴连接所述动力轮。
23.进一步地,所述感应部件包括红外线感应器、雷达感应器、光电传感器中的一种或多种。
24.进一步地,所述移动部件包括:
25.左驱动轮以及右驱动轮,其设置在所述基座的一侧上,并分别左右设置;所述左驱动轮以及右驱动轮分别连接有独立的动力组件;以及
26.若干万向轮,设置在基座的另一侧上。
27.一种垃圾桶,其特征在于,包括:
28.上述的自动避障移动装置;以及
29.桶体,其固定在所述基座上;桶体内设有隔板,隔板的上方成形有用于容纳垃圾的置物腔。
30.进一步地,还包括排风扇,其安装在所述隔板的下方,所述隔板上设有与所述排风扇相对的出风口。
31.本实用新型相比现有技术突出且有益的技术效果是:
32.本实施例中的自动避障移动装置,其承载的是一桶体,当用户需要丢垃圾时,可遥控所述主控组件来使所述基座承载桶体到用户前,来进行垃圾丢放,从而通过主控组件、感应部件以及移动部件的相配合,实现垃圾桶的自动搬运,来方便用户使用垃圾桶。
33.本专利通过动力组件与摆转组件前后相配合来实现基座的前后运动,尤其是所本专利通过摆转电机带动所述驱动齿轮转动来带动所述转向轮转动,来控制基座的运动方向,整体结构紧凑,稳定性强。
附图说明
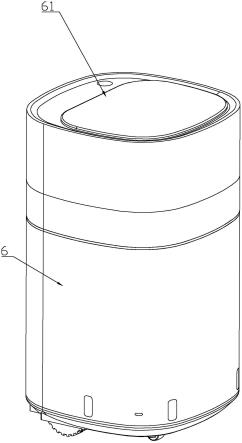
34.图1是实施例1的结构示意图。
35.图2是实施例1的侧面截断图。
36.图3是实施例1中基座处的结构示意图。
37.图4是动力轮以及动力组件的结构示意图。
38.图5是图4的爆炸示意图。
39.图6是动力组件中摇杆处的爆炸示意图。
40.图7是实施例1中基座与桶体的爆炸示意图。
41.图8是实施例2的结构示意图。
42.图9是实施例2中基座处的结构示意图。
43.图10是实施例2中基座的底部示意图。
44.图中标号所表示的含义:
45.1、基座;11、缺口部;
46.2、移动部件;21、动力轮;211、驱动电机;22、转向轮;23、摆转电机;24、联动杆;241、导向销;25、摇杆;26、转动节;27、摆动块;271、联动齿;272、导向槽;28、驱动齿轮;29、护盖;291、延伸臂;292、安装杆;
47.3、感应部件;4、主控组件;
48.51、左驱动轮;52、右驱动轮;53、万向轮;531、轮座;
49.6、桶体;61、隔板;611、出风口;62、置物腔;63、排风扇;64、安装腔;
50.7、桶盖;
具体实施方式
51.下面结合具体实施例对本实用新型作进一步描述:
52.实施例1:
53.一种垃圾桶,包括桶体6以及一种自动避障移动装置;结合图1、2所示,所述桶体6由塑料材质制成,其整体呈圆柱状;所述桶体6中空设置;桶体6内靠下设有一隔板61,隔板61与所述桶体6一体成形设置,通过隔板61向上分隔有一用于容纳垃圾的置物腔62,隔板61向下分隔有一安装腔64,所述安装腔64用于安装所述自动避障移动装置。所述置物腔62的上方还设有可开合的桶盖7,使用者可在所述置物腔62中设置垃圾袋,再通过打开或关闭所述桶盖7来投放垃圾。
54.本专利中的所述动搬运机器人包括有一基座1、移动部件2、感应部件3以及主控组件4,结合图3-6所示,所述基座1被设置成适配所述桶体6的圆形,且所述基座1整体呈平板状,基座1放置在所述桶体6的安装腔64中,并与安装腔64的边沿相固定,上述移动部件2、感应部件3以及主控组件4大部分均安装在所述基座1上,通过基座1来将上述移动部件2、感应部件3以及主控组件4封闭在桶体6的安装腔64中。
55.进一步地,所述移动部件2设置在基座1中,用于带动基座1移动,具体来说,所述移动部件2包括若干动力轮21、若干转向轮22、动力组件以及摆转组件,所述动力组件用于驱动动力轮21转动,所述摆转组件用于改变转向轮22朝向。
56.如图3所示,所述动力组件包括驱动电机211,所述基座1的一侧成形有一安装盒,所述驱动电机211固定在所述安装盒中,所述驱动电机211的两端设有传动轴;所述动力轮21设有两个,分别通过传动轴进行连接,通过所述驱动电机211来带动所述动力轮21转动。
57.结合图3、4所示,所述摆转组件包括摆转电机23、联动杆24以及摇杆25,所述摆转电机23通过支架悬设在所述基座1上,所述联动杆24连接所述摆转电机23,并由所述摆转电机23带动做横向运动,所述摇杆25的一端连接所述联动杆24,转向轮22与摇杆25的另一端转动连接,摇杆25的中部设有转动节26。摆转电机23工作时,摆转电机23带动所述联动杆24做横向运动,通过摇杆25来改变转向轮22朝向。
58.具体如图5所示,本实施例中,所述转向轮22设有两个,其分别设置在所述联动杆24的左右两端,至此,本专利中所述的自动避障移动装置供设有四个轮子,其刚好四周分布在所述基座1的四个角落上,所述基座1上也设有四个适配轮子的缺口部11。
59.本实施例中,所述联动杆24平置在悬设的摆转电机23下方,在联动杆24与摆转电机23之间设有对应的联动结构;如图4、5所示,所述摆转电机23带动有一驱动齿轮28,摆转电机23上的上方设有一护盖29,护盖29的前端与所述基座1之间相连接有一安装杆292,安装杆292上摆动设有一摆动块27,摆动块27朝向摆转电机23,并置于所述驱动齿轮28的下方,在摆动块27朝向摆转电机23的一端上设有与所述驱动齿轮28相啮合的联动齿271;除此以外,所述摆动块27与所述联动杆24之间还设有联动结构,其包括分别设置在动块与联动杆24上的导向槽272与导向销241,所述导向槽272呈条状,其开设在所述摆动块27的正中位置,所述导向销241设置在联动杆24的上端,并向上延伸,所述摆动块27与所述联动杆24上
下相贴合设置,从而使得所述导向销241置于所述导向槽272内。
60.本实施例中移动部件2的工作方式为:当所述自动避障移动装置需要运动时,所述驱动电机211工作带动所述动力轮21工作,由于所述转向轮22与所述摇杆25转动连接,动力轮21工作的同时会带动整个基座1运动,并使所述转向轮22转动,来保证基座1的正常前进;当该自动避障移动装置需要转向时,所述转向电机工作,转向电机带动所述驱动齿轮28转动,驱动齿轮28带动所述摆动块27绕所述安装杆292转动,摆动块27的转动会改变摆动块27上的导向槽272位置,从而改变导向销241的位置,来使所述联动杆24朝左或朝右运动,此时,由于联动杆24的两端分别连接在基座1两侧摇杆25的一端上,联动杆24的运动会带动所述摇杆25朝同一方向转动,从而使两个转向轮22朝同一方形偏转,转向轮22的偏转可以引导整个基座1的运动方向,从而使所述基座1转向。
61.进一步地,所述感应部件3用于检测位于基座1外沿是否存在阻挡物,其周向设置在基座1上,所述主控组件4设置在基座1中,其电性连接所述移动部件2与感应部件3;主控组件4用于当所述感应部件3检测到阻挡物时,控制移动部件2来使基座1避让外界阻挡物。具体如图2、3所示,所述主控组件4包括一电路板,电路板上集成有用于控制的单片机,所述感应部件3包括若干红外线感应器或雷达感应器或光电传感器,其设有四个,并分别安装在所述基座1外沿的桶体6上,对应基座1的四个方位;除此以外,在桶体6的置物腔62中也设有所述感应部件3;所述单片机分别控制所述摆转电机23、驱动电机211,并连接有上述感应部件3,当所述感应部件3检测到桶体6外存在阻挡物时,所述单片机会控制所述摆转电机23工作,从而对阻挡物进行躲避,以求可以运行到指定位置。
62.实际上,主控组件4中会设有通信部件,例如蓝牙,使用者可用手机app来对主控组件4进行控制,来使主控组件4朝指定方向移动,并同上所述感应部件3以及移动部件2的相配合,来躲避障碍物,来到达指定位置。具体来说,用户会配置多个遥控器或手机app来对主控组件4进行遥控,遥控器或手机app可以指示用户目前的所在的位置,结合预先录入的房间地图,当用户按压遥控器时,会给予主控组件4一触发信号,主控组件4自动计算出自动避障移动装置移动的直线路径,而后自动避障移动装置通过感应部件3以及移动部件2的相互配合,躲避障碍。由于本实施例中的自动避障移动装置,其承载的是一桶体6,当用户需要丢垃圾时,可遥控所述主控组件4来使所述基座1承载桶体6到用户前,来进行垃圾丢放,从而通过主控组件4、感应部件3以及移动部件2的相配合,实现垃圾桶的自动搬运,来方便用户使用垃圾桶。
63.此外,本专利通过动力组件与摆转组件前后相配合来实现基座1的前后运动,尤其是所本专利通过摆转电机23带动所述驱动齿轮28转动来带动所述转向轮22转动,来控制基座1的运动方向,整体结构紧凑,稳定性强。
64.进一步地,所述护盖29左右两端设有延伸臂291,延伸臂291的端部设有连接在所述摇杆25中部上的转动节26。如图4、5所示,所述护盖29左右两端的延伸臂291延伸至所述摇杆25的上方,通过转动节26与所述摇杆25相连接,通过护盖29来连接基座1以及转向轮22,来实现转向轮22的固定,从而进一步增加了整体结构的紧凑性,整体结构强度高、耐用。
65.进一步地,如图7所示,本专利中的桶体6上还设有排风扇63,其安装在所述隔板61的下方,所述隔板61上设有与所述排风扇63相对的出风口611,排风扇63与所述主控组件4相连接,并由主控组件4控制。排风扇63可以辅助桶体6的垃圾袋套设,即先将垃圾桶置于桶
体6的置物腔62内,而后启动所述排风扇63,通过排风扇63吸风来使垃圾袋贴合在置物腔62的内壁上。
66.实施例2:
67.如图8-10所示,本实施例大部分结构与实施例1相同,其不同点在于,所述移动部件2包括:
68.左驱动轮51以及右驱动轮52,其设置在所述基座1的一侧上,并分别左右设置,所述左驱动轮51以及右驱动轮52分别连接有独立的动力组件;
69.以及
70.若干万向轮53,设置在基座1的另一侧上。
71.具体如图9、10所示,本实施例中的动力组件包括马达,通过马达驱动有蜗轮,通过蜗轮再驱动有一蜗杆,通过所述蜗杆驱动来驱动座左驱动轮51/右驱动轮52;所述万向轮53设有两个,且万向轮53由两部分组成,其包括一转动设置在底座底部上的轮座531以及设置在轮座531上的轮子,通过轮座531以及轮子的配合来实现万向转动。此时,可通过同时左驱动轮51与右驱动轮52来进行前进,或驱动一侧的左驱动轮51或右驱动轮52来实现转向。
72.上述实施例仅为本实用新型的较佳实施例,并非依此限制本实用新型的保护范围,故:凡依本实用新型的结构、形状、原理所做的等效变化,均应涵盖于本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1