一种储货系统及其调度方法与流程
本发明涉及仓储,特别是涉及一种储货系统及其调度方法。
背景技术:
1、在仓储领域,自动化储货可以大大提升出入库效率,现有技术中,大部分仓库的布局均较为传统,即采用多排货架平行排列的布局,两排货架之间具有巷道,通过自动化取放货设备进出巷道进行货物的取出、放入作业,如miniload方案,这种方案中,取放货设备每进出一次巷道只能完成一次取货或放货任务;现有技术中还有一种如专利cn210557148u所示的料箱机器人执行取放货任务,这种方案料箱机器人一次能够完成多次取放货作业,但是对于机器人的调度较为复杂,很多料箱机器人执行作业时,需要进行有效调度规划路径防止巷道拥堵,调度成本较高。
技术实现思路
1、发明目的:为了克服现有技术中存在的不足,本发明提供一种布局新颖、调度简单的储货系统及其调度方法。
2、技术方案:为实现上述目的,本发明的储货系统,其包括储货架与取放货装置;
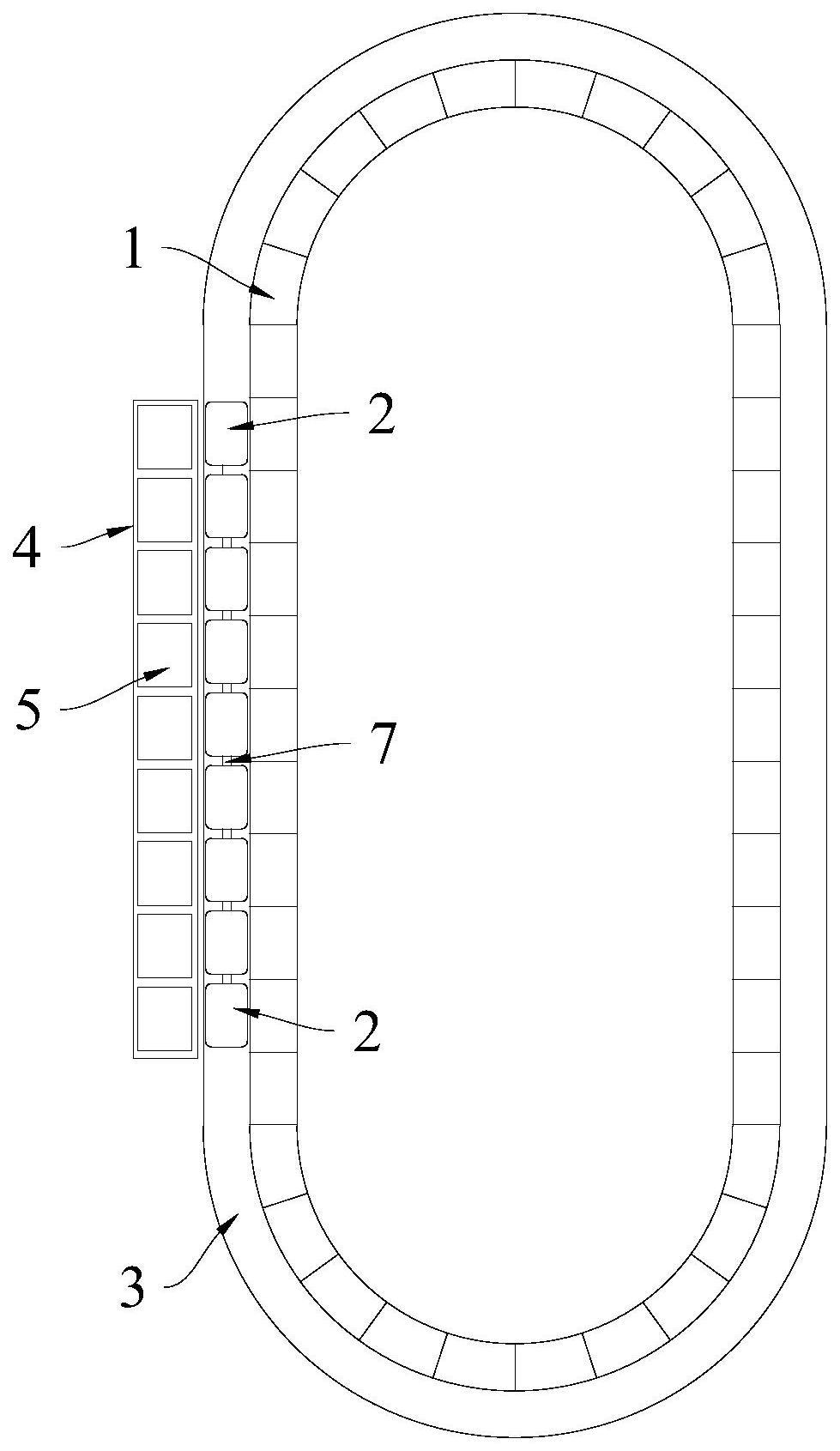
3、所述储货系统还包括外环线,所述取放货装置能够沿着所述外环线运动;
4、所述外环线的内、外两侧中,至少内侧设置有储货架;所述外环线的外侧具有进出货位;
5、所述取放货装置具有移动座体以及能够相对于所述移动座体可控升降的移送部;
6、所述移送部能够在所述进出货位及所述储货架之间转移货物。
7、进一步地,所述取放货装置的数量为多个,所有所述取放货装置以相同线速度沿着所述外环线运动。其中至少部分所述取放货装置具有主动行走机构,或者所有所述取放货装置被外设的牵引机构牵引运动。
8、进一步地,所述进出货位具有投货装置;或者所述储货系统还包括能够在所述外环线之外运动的运输机器人,所述运输机器人能够停靠至所述进出货位。
9、进一步地,所述外环线内还设置有能够在不同储货位之间转运货物的转运装置。
10、进一步地,所述外环线内还设置有内环线,所述转运装置沿着所述内环线运动;所述内环线的两侧均设置有所述储货架,所述内环线与所述外环线之间也设置有所述储货架。
11、一种储货系统的调度方法,调度方法由调度中心实施,调度中心能够与取放货装置通信,其应用于上述的储货系统,在入库流程中,所述方法包括:
12、控制所述取放货装置沿所述外环线运动;
13、当所述取放货装置到达目标进出货位,控制其停靠并从该进出货位获取货物;
14、当所述取放货装置到达目标储货位所在位置,控制其停靠并将货物投放至目标储货位;
15、在出库流程中,所述方法包括:
16、控制所述取放货装置沿所述外环线运动;
17、当所述取放货装置到达目标储货位所在位置,控制其停靠并从目标储货位取出货物;
18、当所述取放货装置到达目标进出货位,控制其停靠并将货物输出至所述目标进出货位。
19、进一步地,多个所述取放货装置组成装置阵列,所有所述取放货装置以相同线速度沿着所述外环线运动;所述方法包括:
20、判断所述装置阵列中是否有至少一个所述取放货装置到达目标储货位或目标进出货位,是则控制所述装置阵列停止运动,并控制到达目标储货位或目标进出货位的取放货装置执行取货或出货任务。
21、进一步地,所述方法还包括:
22、获取目标储货位的信息;
23、根据所有所述目标储货位的位置以及所述装置阵列的属性,对所述目标储货位进行分组,以使得所述装置阵列能够停靠最少的次数完成对所有所述目标储货位的放货作业或取货作业;
24、根据分组对所述进出货位对应的货物信息进行配置。
25、进一步地,所述根据所有所述目标储货位的位置以及所述装置阵列的属性,对所述目标储货位进行分组,以使得所述装置阵列能够停靠最少的次数完成对所有所述目标储货位的放货作业或取货作业,包括:
26、获取多个所述目标储货位的第一布局信息,以及所述装置阵列中闲置的所述取放货装置的第二布局信息;
27、对所述第二布局信息与所述第一布局信息进行匹配,使得最多数量的闲置的所述取放货装置能够匹配到所述目标储货位;
28、生成新的第一布局信息与第二布局信息。
29、进一步地,所述所述外环线内还设置有能够在不同储货位之间转运货物的转运装置;所述方法还包括:
30、控制所述转运装置将外层的所述储货位上的货物转运至内层的所述储货位;
31、更新所述储货位与货物的对应信息。
32、有益效果:本发明的储货系统及其调度方法,通过设置供取放货装置运行的外环线,并在外环线的内、外分别设置储货架与进出货位,取放货装置可以沿着外环线循环运行并执行进出货位与储货架之间的货物转运,这种储货系统布局新颖且调度方便,只需要控制取放货装置沿着外环线单向运行并在目标进出货位与目标储货位停靠即可,不存在路径规划、产生拥堵等问题,且可以根据需要配置不同数量的取放货装置以提升出入库效率。
技术特征:
1.一种储货系统,其包括储货架与取放货装置;其特征在于:
2.根据权利要求1所述的储货系统,其特征在于,所述取放货装置的数量为多个,所有所述取放货装置以相同线速度沿着所述外环线运动;
3.根据权利要求1所述的储货系统,其特征在于,所述进出货位具有投货装置;或者所述储货系统还包括能够在所述外环线之外运动的运输机器人,所述运输机器人能够停靠至所述进出货位。
4.根据权利要求1所述的储货系统,其特征在于,所述外环线内还设置有能够在不同储货位之间转运货物的转运装置。
5.根据权利要求4所述的储货系统,其特征在于,所述外环线内还设置有内环线,所述转运装置沿着所述内环线运动;所述内环线的两侧均设置有所述储货架,所述内环线与所述外环线之间也设置有所述储货架。
6.一种储货系统的调度方法,其应用于权利要求1所述的储货系统,其特征在于,在入库流程中,所述方法包括:
7.根据权利要求6所述的调度方法,其特征在于,多个所述取放货装置组成装置阵列,所有所述取放货装置以相同线速度沿着所述外环线运动;所述方法包括:
8.根据权利要求7所述的调度方法,其特征在于,所述方法还包括:
9.根据权利要求8所述的调度方法,其特征在于,所述根据所有所述目标储货位的位置以及所述装置阵列的属性,对所述目标储货位进行分组,以使得所述装置阵列能够停靠最少的次数完成对所有所述目标储货位的放货作业或取货作业,包括:
10.根据权利要求6所述的调度方法,其特征在于,所述所述外环线内还设置有能够在不同储货位之间转运货物的转运装置;所述方法还包括:
技术总结
本发明公开了一种储货系统及其调度方法,其中储货系统包括储货架与取放货装置以及外环线,所述取放货装置能够沿着所述外环线运动;所述外环线的内、外两侧中,至少内侧设置有储货架;所述外环线的外侧具有进出货位;所述取放货装置具有移动座体以及能够相对于所述移动座体可控升降的移送部;所述移送部能够在所述进出货位及所述储货架之间转移货物。本发明中,取放货装置可以沿着外环线运行并执行进出货位与储货架之间的货物转运,这种储货系统布局新颖且调度方便,只需要控制取放货装置沿着外环线运行并在目标进出货位与目标储货位停靠即可,不存在路径规划、产生拥堵等问题,且可以根据需要配置不同数量的取放货装置以提升出入库效率。
技术研发人员:高露,姚兴江
受保护的技术使用者:苏州牧星智能科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!