一种容器的起竖控制参数的确定方法、装置及设备与流程
本发明涉及乏燃料后处理,特别是指一种容器的起竖控制参数的确定方法、装置及设备。
背景技术:
1、装载有乏燃料运输容器的车辆在抵达后处理厂乏燃料接收与贮存设施卸料大厅后,需要通过桥式起重机及垂直吊具将容器从水平状态起竖到垂直状态,然后再吊运至冷却坑内对容器进行内腔冷却。
2、目前对乏燃料运输容器的起竖,都是基于在运输容器的车辆具备自由移动功能的情况下进行,即运输容器的车辆能够根据受力方向自行向前或向后移动;
3、某乏燃料后处理厂在容器调试时,如果由于运输容器的车辆的自由移动功能故障等原因,导致运输容器的车辆不具备自由移动功能,则使得容器无法起竖到垂直状态,如果强行起竖容器,桥式起重机吊索会随着容器起吊出现偏离角度,最终造成歪拉斜吊现象,存在极大的安全风险,因此,当遇到突发情况导致运输容器的车辆不能自由移动的工况下,没有相应的方法能够解决乏燃料运输容器无法起竖的问题。
技术实现思路
1、本发明要解决的技术问题是如何提供一种容器的起竖控制参数的确定方法、装置及设备。能够通过确定控制容器起竖过程中的起重机吊索的起升次数,以及起重机吊索的目标偏移角度,使得在遇到突发情况导致运输容器的车辆不能自由移动的工况下,控制乏燃料运输容器进行起竖动作。
2、为解决上述技术问题,本发明的技术方案如下:
3、一种容器的起竖控制参数的确定方法,所述方法包括:
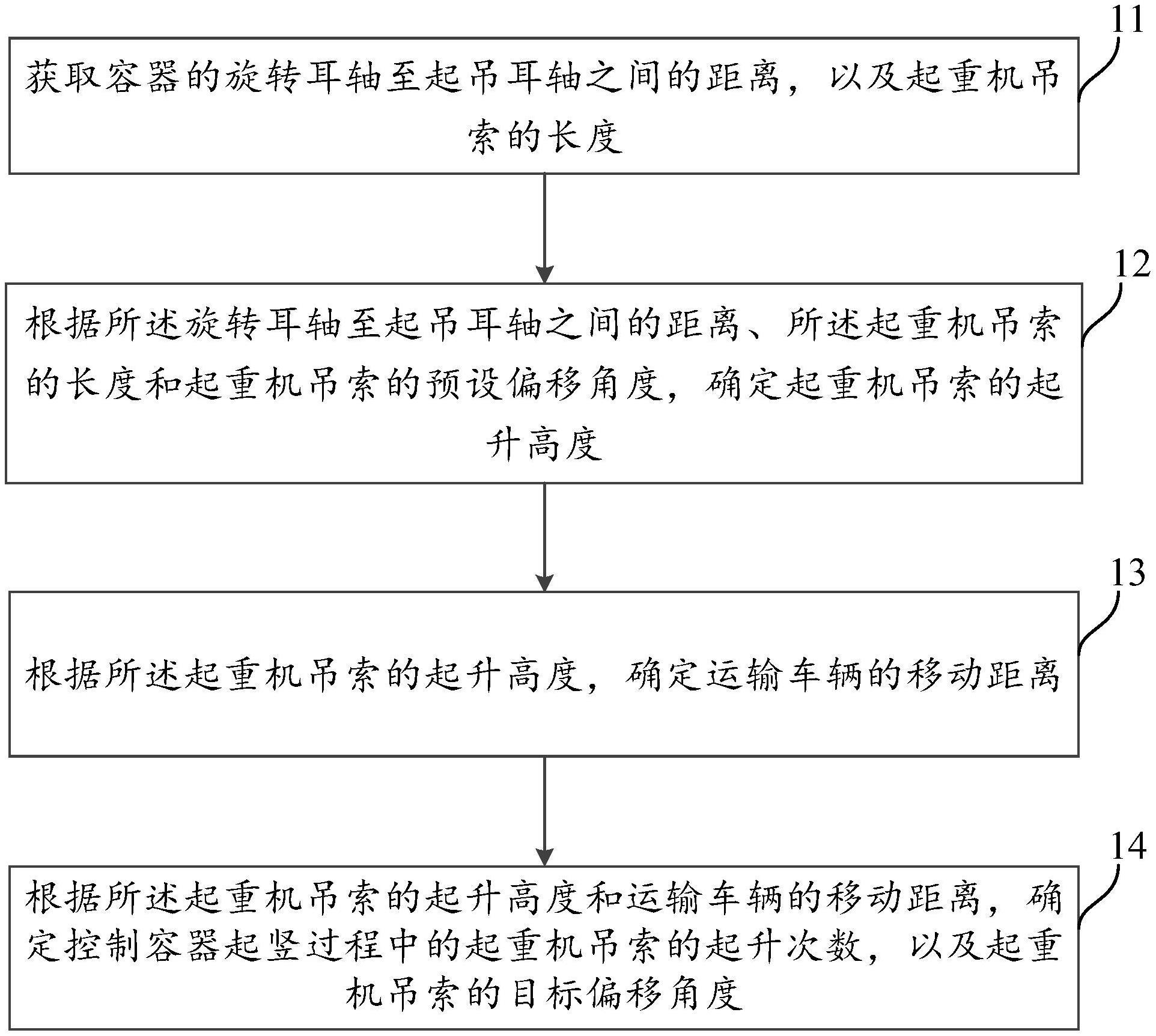
4、获取容器的旋转耳轴至起吊耳轴之间的距离,以及起重机吊索的长度;
5、根据所述旋转耳轴至起吊耳轴之间的距离、所述起重机吊索的长度和起重机吊索的预设偏移角度,确定起重机吊索的起升高度;
6、根据所述起重机吊索的起升高度,确定运输车辆的移动距离;
7、根据所述起重机吊索的起升高度和运输车辆的移动距离,确定控制容器起竖过程中的起重机吊索的起升次数,以及起重机吊索的目标偏移角度。
8、可选的,根据所述旋转耳轴至起吊耳轴之间的距离、所述起重机吊索的长度和起重机吊索的预设偏移角度,确定起重机吊索的起升高度,包括:
9、根据确定起重机吊索的起升高度;
10、其中,h为起重机吊索的起升高度,ly为起重机吊索的长度,lx为容器的旋转耳轴至起吊耳轴之间的距离,α为起重机吊索的预设偏移角度。
11、可选的,根据所述起重机吊索的起升高度,确定运输车辆的移动距离,包括:
12、根据确定运输车辆的移动距离;
13、其中,l为运输车辆的移动距离,ly为起重机吊索的长度,lx为容器的旋转耳轴至起吊耳轴之间的距离,α为起重机吊索的预设偏移角度。
14、可选的,根据所述起重机吊索的起升高度和运输车辆的移动距离,确定控制容器起竖过程中的起重机吊索的起升次数,以及起重机吊索的目标偏移角度,包括:
15、根据所述旋转耳轴至起吊耳轴之间的距离和所述运输车辆的移动距离,确定旋转耳轴至起吊耳轴之间的水平距离;
16、将第i次旋转耳轴至起吊耳轴之间的水平距离,作为第i+1次起吊容器时的旋转耳轴至起吊耳轴之间的距离,确定第i+1次起吊容器时的起重机吊索的起升高度;
17、根据所述起重机吊索的起升高度,确定控制容器起竖过程中的起重机吊索的起升次数,以及起重机吊索的目标偏移角度;
18、其中,i=1,2,3,…,n,n为容器的起升次数。
19、可选的,根据所述旋转耳轴至起吊耳轴之间的距离和所述运输车辆的移动距离,确定旋转耳轴至起吊耳轴之间的水平距离,包括:
20、根据lx1=lx-l,确定旋转耳轴至起吊耳轴之间的水平距离;
21、其中,lx1为旋转耳轴至起吊耳轴之间的水平距离,lx为旋转耳轴至起吊耳轴之间的距离,l为运输车辆的移动距离。
22、可选的,根据所述起重机吊索的起升高度,确定控制容器起竖过程中的起重机吊索的起升次数,以及起重机吊索的目标偏移角度,包括:
23、当所述起重机吊索的起升高度大于或者等于所述起重机吊索的长度时,完成容器的起竖动作,确定控制容器起竖过程中的起重机吊索的起升次数,以及起重机吊索的目标偏移角度。
24、可选的,在根据所述旋转耳轴至起吊耳轴之间的距离和所述运输车辆的移动距离,确定旋转耳轴至起吊耳轴之间的水平距离之前,还包括:
25、控制运输车辆按照运输车辆的移动距离进行移动,使得起重机吊索的预设偏移角度归为0°。
26、本发明还提供一种乏燃料运输容器的起竖装置,所述装置包括:
27、获取模块,用于获取容器的旋转耳轴至起吊耳轴之间的距离,以及起重机吊索的长度;
28、处理模块,用于根据所述旋转耳轴至起吊耳轴之间的距离、所述起重机吊索的长度和起重机吊索的预设偏移角度,确定起重机吊索的起升高度;根据所述起重机吊索的起升高度,确定运输车辆的移动距离;根据所述起重机吊索的起升高度和运输车辆的移动距离,确定控制容器起竖过程中的起重机吊索的起升次数,以及最优的起重机吊索的偏移角度。
29、本发明还提供一种计算设备,包括:处理器,存储器及存储在所述存储器上并可在所述处理器上运行的程序或指令,所述程序或指令被所述处理器执行时实现如上所述的方法的步骤。
30、本发明还提供一种可读存储介质,所述可读存储介质上存储程序或指令,所述程序或指令被处理器执行时实现如上所述的方法的步骤。
31、本发明的上述方案至少包括以下有益效果:
32、本发明的上述方案,通过获取乏燃料运输容器的旋转耳轴至起吊耳轴之间的距离;根据所述旋转耳轴至起吊耳轴之间的距离和起重机吊索的预设偏移角度,确定起重机吊索的起升高度;据所述起重机吊索的起升高度,确定运输车辆的移动距离;根据所述起重机吊索的起升高度和运输车辆的移动距离,控制乏燃料运输容器进行起竖动作。能够通过确定控制容器起竖过程中的起重机吊索的起升次数,以及起重机吊索的目标偏移角度,使得在遇到突发情况导致运输容器的车辆不能自由移动的工况下,控制乏燃料运输容器进行起竖动作。
技术特征:
1.一种容器的起竖控制参数的确定方法,其特征在于,所述方法包括:
2.根据权利要求1所述的容器的起竖控制参数的确定方法,其特征在于,根据所述旋转耳轴至起吊耳轴之间的距离、所述起重机吊索的长度和起重机吊索的预设偏移角度,确定起重机吊索的起升高度,包括:
3.根据权利要求2所述的容器的起竖控制参数的确定方法,其特征在于,根据所述起重机吊索的起升高度,确定运输车辆的移动距离,包括:
4.根据权利要求1所述的容器的起竖控制参数的确定方法,其特征在于,根据所述起重机吊索的起升高度和运输车辆的移动距离,确定控制容器起竖过程中的起重机吊索的起升次数,以及起重机吊索的目标偏移角度,包括:
5.根据权利要求4所述的容器的起竖控制参数的确定方法,其特征在于,根据所述旋转耳轴至起吊耳轴之间的距离和所述运输车辆的移动距离,确定旋转耳轴至起吊耳轴之间的水平距离,包括:
6.根据权利要求4所述的容器的起竖控制参数的确定方法,其特征在于,根据所述起重机吊索的起升高度,确定控制容器起竖过程中的起重机吊索的起升次数,以及起重机吊索的目标偏移角度,包括:当所述起重机吊索的起升高度大于或者等于所述起重机吊索的长度时,完成容器的起竖动作,确定控制容器起竖过程中的起重机吊索的起升次数,以及起重机吊索的目标偏移角度。
7.根据权利要求1所述的容器的起竖控制参数的确定方法,其特征在于,在根据所述旋转耳轴至起吊耳轴之间的距离和所述运输车辆的移动距离,确定旋转耳轴至起吊耳轴之间的水平距离之前,还包括:
8.一种容器的起竖控制参数的确定装置,其特征在于,所述装置包括:
9.一种计算设备,其特征在于,包括:处理器,存储器及存储在所述存储器上并可在所述处理器上运行的程序或指令,所述程序或指令被所述处理器执行时实现如权利要求1-7任一项所述的方法的步骤。
10.一种可读存储介质,其特征在于,所述可读存储介质上存储程序或指令,所述程序或指令被处理器执行时实现如权利要求1-7任一项所述的方法的步骤。
技术总结
本发明提供一种容器的起竖控制参数的确定方法、装置及设备。容器的起竖控制参数的确定方法,包括:获取容器的旋转耳轴至起吊耳轴之间的距离,以及起重机吊索的长度;根据所述旋转耳轴至起吊耳轴之间的距离、所述起重机吊索的长度和起重机吊索的预设偏移角度,确定起重机吊索的起升高度;根据起重机吊索的起升高度,确定运输车辆的移动距离;根据所述起重机吊索的起升高度和运输车辆的移动距离,确定控制容器起竖过程中的起重机吊索的起升次数,以及起重机吊索的目标偏移角度。本发明的方案能够通过起重机吊索的起升次数和起重机吊索的目标偏移角度,使得在遇到突发情况导致运输容器的车辆不能自由移动的工况下,控制乏燃料运输容器进行起竖动作。
技术研发人员:杨鸿杰,李经海,乔登平,董春华,易手凯,黄乾程,王明丛,雷星星,李园,高岗,丁志林,刘雪花
受保护的技术使用者:中核四0四有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!