一种储能集装箱内部电池组装卸装置的制作方法
本发明涉及机器人的,尤其涉及一种储能集装箱内部电池组装卸装置。
背景技术:
1、随着新能源的发展和普及,储能技术成为了解决能源供需平衡和电网稳定的关键手段。储能集装箱是一种用于集中存储和管理能量的设备,其内部配置有大量的电池组。在储能集装箱的生产、安装、维修及拆卸过程中,电池组的装配和拆卸是至关重要的一环。
2、目前,储能集装箱内电池组的装配与维修拆卸主要依靠人工操作。尽管这种方式在一定程度上满足了工作需求,但其存在以下几个方面的问题:
3、1、安全性问题:在储能集装箱内进行电池组的装配与维修拆卸时,操作人员需要面对高压电、重型设备等潜在危险因素,容易发生安全事故,对操作人员的生命安全造成威胁。
4、2、效率低下:由于人工操作的局限性,电池组装配与维修拆卸的速度和效率相对较低。在大批量储能集装箱管理的场景下,人力资源的不足和工作效率的低下将导致整体项目进度的延误。
5、3、费时费力:人工操作电池组装配与维修拆卸过程中,操作人员需要长时间保持高度集中,容易产生疲劳,进而影响工作质量。同时,人工操作还会消耗大量的时间和人力成本,导致整体项目成本的上升。
6、4、自动化程度低:目前市场上已有部分自动化设备用于电池组的装配和拆卸,但这些设备往往无法适应储能集装箱内狭小的空间和复杂的环境,因此自动化程度仍有待提高。
7、综上所述,针对储能集装箱内电池组装配与维修拆卸过程中存在的问题,迫切需要一种具有高自动化程度、安全性强、效率高且适应狭小空间的装配与拆卸设备,由此我们特别研发了一种储能集装箱内部电池组装卸装置,以满足上述需求。
技术实现思路
1、针对以上现有存在的问题,本发明提供一种储能集装箱内部电池组装卸装置,针对储能集装箱内部狭小的空间和复杂的环境,着力于解决目前储能集装箱内电池组的装配与维修拆卸一般都需要人工操作而产生人工操作安全性差、效率较低、费时费力等问题,特别适用于大批量储能集装箱管理,通过分别配置在每个储能集装箱内,能够极大提高储能集装箱管理的自动化。
2、本发明的技术方案在于:
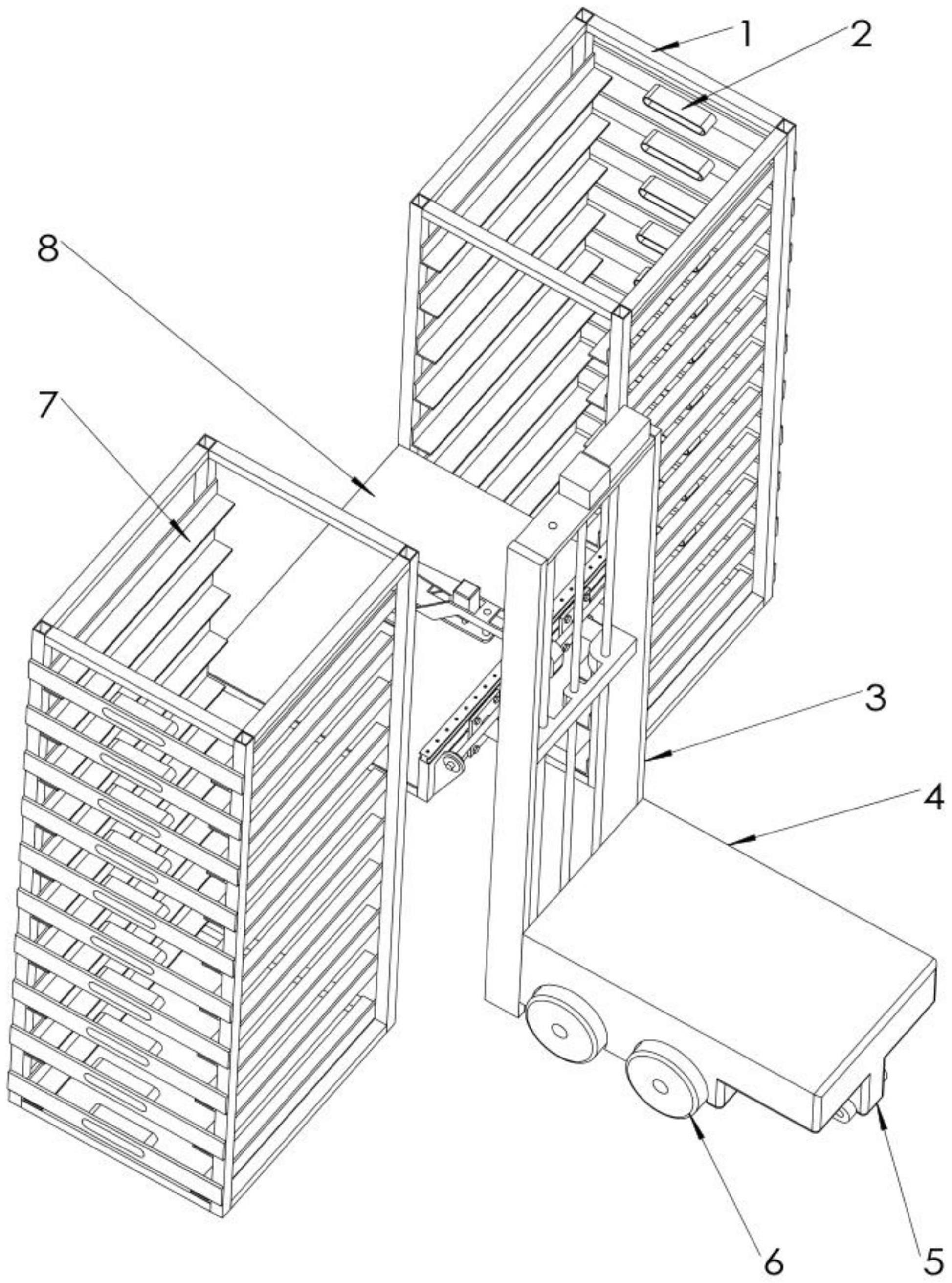
3、本发明提供一种储能集装箱内部电池组装卸装置,包括控制器、竖直框架、车体、升降驱动结构、升降台、前接承载结构、主悬臂、电池平移驱动结构、电池组牵拉结构、电池托盘和底部前展平衡结构,所述控制器设置在车体内,所述车体的前端设有竖直框架,所述竖直框架的中央设有竖直升降结构,所述车体的底部设有用于向前伸展支撑的底部前展平衡结构,所述竖直升降结构上设有用于由控制器控制并与底部前展平衡结构的行程进行配合的升降台,所述升降台的上升行程与底部前展平衡结构的向前伸展行程处于同一时间段,所述升降台的下降行程与底部前展平衡结构的向后收缩行程处于同一时间段,所述升降台的前端设有前接承载结构,所述前接承载结构上设有电池平移驱动结构且前端设有水平向前延伸的电池托盘,所述电池平移驱动结构上设有主悬臂,所述主悬臂向前延伸且前端处于电池托盘中央的上方,所述主悬臂上设有用于牵拉抓持电池组把手的电池组牵拉结构。
4、进一步地,所述底部前展平衡结构包括伸展撑块和电动推杆,所述车体的底部左右两侧分别设有电动推杆,两个所述电动推杆水平向前延伸且同步伸缩,两个所述电动推杆的前端穿过竖直框架并设有伸展撑块。
5、进一步地,所述伸展撑块的底部设有用于检测伸展撑块与地面之间相互作用力的第一压力传感器。
6、进一步地,所述电动推杆呈后端高、前端低的放置状态,所述电动推杆的轴线与水平面存在0-5°的夹角,所述电动推杆在最大伸展状态下伸展撑块的底部与地面接触。
7、进一步地,所述竖直升降结构包括第一伺服电机、直角减速器、竖直丝杠和竖直光杠,所述竖直框架内部中央设有设有竖直延伸的竖直丝杠,所述竖直丝杠的下端转动连接在竖直框架的底部且上端穿出竖直框架的上部并与竖直框架上端的直角减速器连接,所述直角减速器的一侧连接有第一伺服电机,所述第一伺服电机通过直角减速器驱动竖直丝杠转动,所述竖直丝杠上螺纹嵌套有升降台,所述升降台处于竖直框架内且左右两端分别贯穿有竖直光杠,所述竖直光杠的上下两端分别嵌入在竖直框架的两端。
8、进一步地,所述电池平移驱动结构包括水平丝杠、右端板、传动带、带轮、左端板、第二伺服电机、导轨和滑块,所述前接承载结构的上部左右两端分别设有水平向后延伸的左端板和右端板,所述左端板和右端板之间设有滚动的水平丝杠,所述左端板上处于水平丝杠下方的部分设有第二伺服电机,所述第二伺服电机的主轴和水平丝杠的左端分别向左伸出左端板且分别设有带轮,两个所述带轮之间设有传动带,所述第二伺服电机通过带传动驱动水平丝杠转动,所述水平丝杠上螺纹嵌套有主悬臂的后部,所述主悬臂处于水平丝杠前方的部分下侧设有滑块,所述滑块的下部左右贯穿有导轨,所述导轨设置在前接承载结构上且左右延伸。
9、进一步地,所述电池组牵拉结构包括电磁伸缩致动器、悬臂连板、前导杆、套拉弯块和悬臂托板,所述主悬臂的前端弯曲向下延伸且下端设有水平延伸的悬臂托板,所述主悬臂的中部上侧设有水平向前延伸的悬臂连板,所述悬臂连板与悬臂托板之间设有前导杆,所述前导杆上嵌套有用于套挂在电池组手柄上的套拉弯块,所述套拉弯块的后端穿过主悬臂的弯曲部分并由主悬臂后侧的后导杆贯穿,所述主悬臂的中部设有电磁伸缩致动器,所述电磁伸缩致动器的伸缩端朝下且与套拉弯块的中部相连,所述电磁伸缩致动器驱动套拉弯块上下移动。
10、进一步地,所述套拉弯块的前端中部呈水平板状结构且前端左右两侧分别向下弯曲形成用于自上而下钩挂在电池组手柄上的钩状弯曲结构,所述套拉弯块的钩状弯曲部分内侧设有第二压力传感器。
11、进一步地,所述车体采用agv小车,车体的后部设有用于平衡车体前后两端重量的配重块。
12、进一步地,所述控制器分别与车体的控制模块、第一伺服电机、第二伺服电机、第一压力传感器和第二压力传感器电性连接,所述控制器与车体的控制模块交互通信,所述控制器分别控制第一伺服电机和第二伺服电机的启闭、转速和转向动作,所述控制器分别接收第一压力传感器和第二压力传感器的压力传感信号。
13、本发明由于采用了上述技术,使之与现有技术相比具体的积极有益效果为:
14、1、本发明提高了提高储能集装箱内电池拆装的安全性,通过采用机械手进行电池组的装配与维修拆卸,避免了操作人员直接面对高压电、重型设备等潜在危险因素,从而降低了安全事故的发生概率,确保了操作人员的生命安全。
15、2、本发明提高了提高储能集装箱内电池拆装效率,储能箱内电池拆装机械手具有高度自动化程度,能够在短时间内完成电池组的装配与维修拆卸任务。相较于传统的人工操作方式,机械手可以显著提高整体工作效率,减少项目进度延误的风险。
16、3、本发明有效节省了时间与人力成本,储能箱内电池拆装机械手可自动进行电池组的装配与维修拆卸,大大减少了操作人员的工作疲劳程度。同时,其高效的工作性能也有助于降低项目的时间和人力成本,为企业节省资源。
17、4、本发明有效提高了储能集装箱内部电池组拆装的自动化程度,本发明针对储能集装箱内狭小空间和复杂环境进行了专门设计,能够在有限的空间内将电池组从电池支架上牵拉到电池托盘上,然后再运送到储能集装箱的门口,能够实现电池组的快速装配与拆卸,对于大批量储能集装箱的管理,大幅提高了储能集装箱管理自动化程度,适用于各类储能集装箱的管理,例如大型电力企业、新能源汽车充电站和可再生能源发电系统等。
- 还没有人留言评论。精彩留言会获得点赞!