一种张力自适应的浮辊控制方法和机构与流程
本发明属于张力控制领域,具体涉及一种张力自适应的浮辊控制方法和机构。
背景技术:
1、精准而且稳定的张力控制对提高箔材生产效率,提升产品加工品质,减少断带和打皱等方面至关重要,但是箔材生产加工过程中,速度变化,辊的制造精度和装配精度,收放卷卷径变化,机械特性变化及辊的跳动等因素,都严重影响张力控制的稳定性,多种张力影响因素综合在一起导致了卷绕系统的张力的非线性改变。另一方面,目前的浮辊式张力控制方式,多数都是被动控制方式,且有浮辊自身重量问题,并且不具备自适应调节功能,很多时候,无法满足控制要求,而且张力控制系统设计完毕后,想进一步提升张力控制稳定性,需要制定特定的控制件以满足某一卷绕系统的张力稳定,针对不同卷绕系统设计不同的张力控制机构会增加生产成本。
技术实现思路
1、为解决上述现有技术中的问题,本发明提出了一种张力自适应的浮辊控制方法和机构,用于适配不同的卷绕系统,实时主动调节卷绕系统中非线性变化的张力,解决卷绕系统张力不稳定的问题。
2、本发明的技术方案为:
3、一种张力自适应的浮辊控制方法,包括步骤:
4、s1、获取浮辊的状态数据;
5、s2、根据浮辊的状态数据获取浮辊的控制误差数据;
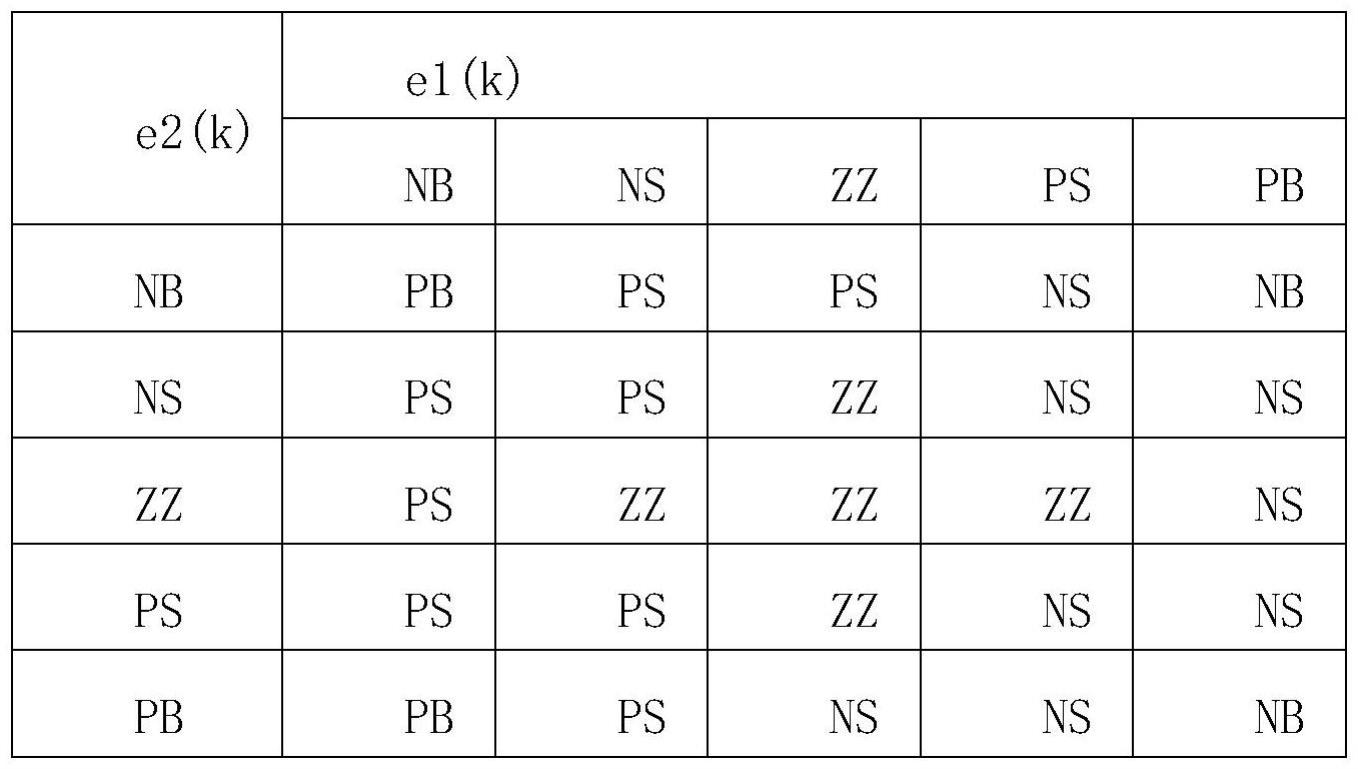
6、s3、使用模糊算法,根据浮辊的控制误差数据获取调节系数;
7、s4、使用pid控制器,根据调节系数产生浮辊控制信号;
8、s5、根据浮辊控制信号以稳定张力牵引浮辊。
9、作为一种优选的方案,浮辊的状态数据包括浮辊位置数据,浮辊控制信号用于控制牵引电机。
10、作为一种优选的方案,浮辊的状态数据包括浮辊张力数据,浮辊控制信号用于控制比例阀。
11、作为一种优选的方案,浮辊的状态数据包括浮辊位置数据和浮辊张力数据,浮辊控制信号用于控制牵引电机和比例阀。
12、作为一种优选的方案,步骤s3具体为:使用三角隶属度函数对浮辊的控制误差数据进行模糊计算,输出pid控制器的比例系数作为调节系数。
13、另一方面,本发明还提供一种张力自适应的浮辊控制机构,包括测量缓存单元、模糊计算单元、pid控制单元、浮辊控制单元;
14、测量缓存单元用于获取浮辊的状态数据,并根据浮辊的状态数据获取浮辊的控制误差数据;
15、模糊计算单元用于使用模糊算法,根据浮辊的控制误差数据获取调节系数;
16、pid控制单元内置pid控制器,用于根据调节系数产生浮辊控制信号;
17、浮辊控制单元用于根据浮辊控制信号以稳定张力牵引浮辊。
18、作为一种优选的方案,测量缓存单元包括位置传感器,浮辊控制单元包括牵引电机。
19、作为一种优选的方案,测量缓存单元包括力传感器,浮辊控制单元包括比例阀。
20、作为一种优选的方案,测量缓存单元包括位置传感器和力传感器,浮辊控制单元包括牵引电机和比例阀。
21、作为一种进一步优选的方案,位置传感器为拉伸位置传感器、电位器或角度传感器。
22、本发明的有益效果包括:本发明提供的一种张力自适应的浮辊控制方法,通过主动测量浮辊的位置和/或张力信息,并根据位置和/或张力信息输出浮辊的控制信号,用于实时的补偿浮辊的非线性的张力变化,以保持浮辊在系统运行期间的张力稳定。进一步的,本发明提供的一种张力自适应的浮辊控制机构,能以组装的方式适配到不同的卷绕系统中,将传感器安装到卷绕系统中待测量组件附近,并应用牵引电机和压辊根据测量的信息实现相应的负反馈的张力控制,以解决卷绕系统的张力稳定问题,并且算法简单以能适配低端控制器。
技术特征:
1.一种张力自适应的浮辊控制方法,其特征在于,包括步骤:
2.如权利要求1所述的一种张力自适应的浮辊控制方法,其特征在于,所述浮辊的状态数据包括浮辊位置数据,所述浮辊控制信号用于控制牵引电机。
3.如权利要求1所述的一种张力自适应的浮辊控制方法,其特征在于,所述浮辊的状态数据包括浮辊张力数据,所述浮辊控制信号用于控制比例阀。
4.如权利要求1所述的一种张力自适应的浮辊控制方法,其特征在于,所述浮辊的状态数据包括浮辊位置数据和浮辊张力数据,所述浮辊控制信号用于控制牵引电机和比例阀。
5.如权利要求1所述的一种张力自适应的浮辊控制方法,其特征在于,所述步骤s3具体为:使用三角隶属度函数对所述浮辊的控制误差数据进行模糊计算,输出所述pid控制器的比例系数作为所述调节系数。
6.一种张力自适应的浮辊控制机构,其特征在于,包括测量缓存单元、模糊计算单元、pid控制单元、浮辊控制单元;
7.如权利要求6所述的一种张力自适应的浮辊控制机构,其特征在于,所述测量缓存单元包括位置传感器,所述浮辊控制单元包括牵引电机。
8.如权利要求6所述的一种张力自适应的浮辊控制机构,其特征在于,所述测量缓存单元包括力传感器,所述浮辊控制单元包括比例阀。
9.如权利要求6所述的一种张力自适应的浮辊控制机构,其特征在于,所述测量缓存单元包括位置传感器和力传感器,所述浮辊控制单元包括牵引电机和比例阀。
10.如权利要求7或9任一项所述的一种张力自适应的浮辊控制机构,其特征在于,所述位置传感器为拉伸位置传感器、电位器或角度传感器。
技术总结
本发明公开一种张力自适应的浮辊控制方法,包括步骤:获取浮辊的状态数据;根据浮辊的状态数据获取浮辊的控制误差数据;使用模糊算法,根据浮辊的控制误差数据获取调节系数;使用PID控制器,根据调节系数产生浮辊控制信号;根据浮辊控制信号以稳定张力牵引浮辊。本发明的张力自适应的浮辊控制方法,通过主动测量浮辊的位置和/或张力信息,并根据位置和/或张力信息输出浮辊的控制信号,用于实时的补偿浮辊的非线性的张力变化,以保持浮辊在系统运行期间的张力稳定。
技术研发人员:魏新元,胡旭钢,纪鹏飞,樊旭
受保护的技术使用者:浙江御辰东智能科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!