一种自动搬运系统及平台
本技术涉及搬运,具体而言,涉及一种自动搬运系统及平台。
背景技术:
1、目前的火箭炮多采用模块化储运发箱技术,其能在一定程度上提升火箭炮武器的作战效率,延长战场寿命,然而,对于储运发箱的自动搬运和装填技术还比较落后,目前仍需要人工辅助操控搬运设备来完成,自动化相对较低,尤其是在户外地形复杂、地理位置偏僻以及需要对大型机械设备进行装配等情况下,依然需要人工辅助来操控搬运设备,以实现搬运,而这样的人工搬运方式依然存在危险性高,效率低下等问题,难以满足当前行业要求。
技术实现思路
1、本技术提供一种自动搬运系统及平台,以无需人参与搬运,完全实现自动搬运需求。
2、一方面,本技术实施例提供了一种自动搬运系统,该自动搬运系统包括:
3、旋转平台;
4、机械臂,包括主臂和副臂,所述主臂和副臂转动连接,所述主臂安装在所述旋转平台上,在所述旋转平台的旋转下,所述主臂带动所述副臂同步旋转;
5、搬运机构,转动连接于所述副臂端部;
6、定位器,安装于所述搬运机构,用于采集目标物的位置信息;
7、主控机,分别与所述主臂、所述副臂、所述旋转平台电连接,用于:
8、获取所述定位器发送的位置信息;
9、对所述位置信息进行分析,得到所述目标物所在位置的位姿信息;
10、根据所述位姿信息、所述旋转平台当前的位姿信息、所述主臂当前的位姿信息、所述副臂当前的位姿信息和所述搬运机构当前的位姿信息,利用已建立的针对本搬运系统的运动模型,确定所述旋转平台、所述主臂、所述副臂和搬运机构各自对应的用于表示搬运所述目标物时所要执行的第一运动轨迹参数;
11、控制所述旋转平台、所述主臂、所述副臂和搬运机构按照各自对应的第一运动轨迹参数运行,以搬运所述目标物。
12、作为一个实施例,所述主控机,还用于:
13、获取定位器采集的用于表示期望所述目标物搬运至待搬运位置处的第二位置信息;
14、对所述第二位置信息进行分析,得到所述待搬运位置的定位信息;
15、根据所述定位信息、所述旋转平台搬起所述目标物时的位姿信息、所述主臂搬起所述目标物时的位姿信息、所述副臂搬起所述目标物时的位姿信息和所述搬运机构搬起所述目标物时的位姿信息,利用已建立的针对本搬运系统的运动模型,确定所述旋转平台、所述主臂、所述副臂和搬运机构各自对应的用于将所述目标物搬运到目标位置时所要执行的第二运动轨迹参数;
16、指示所述旋转平台、所述主臂、所述副臂和搬运机构按照所述第二轨迹参数将所述目标物搬运至所述目标位置处。
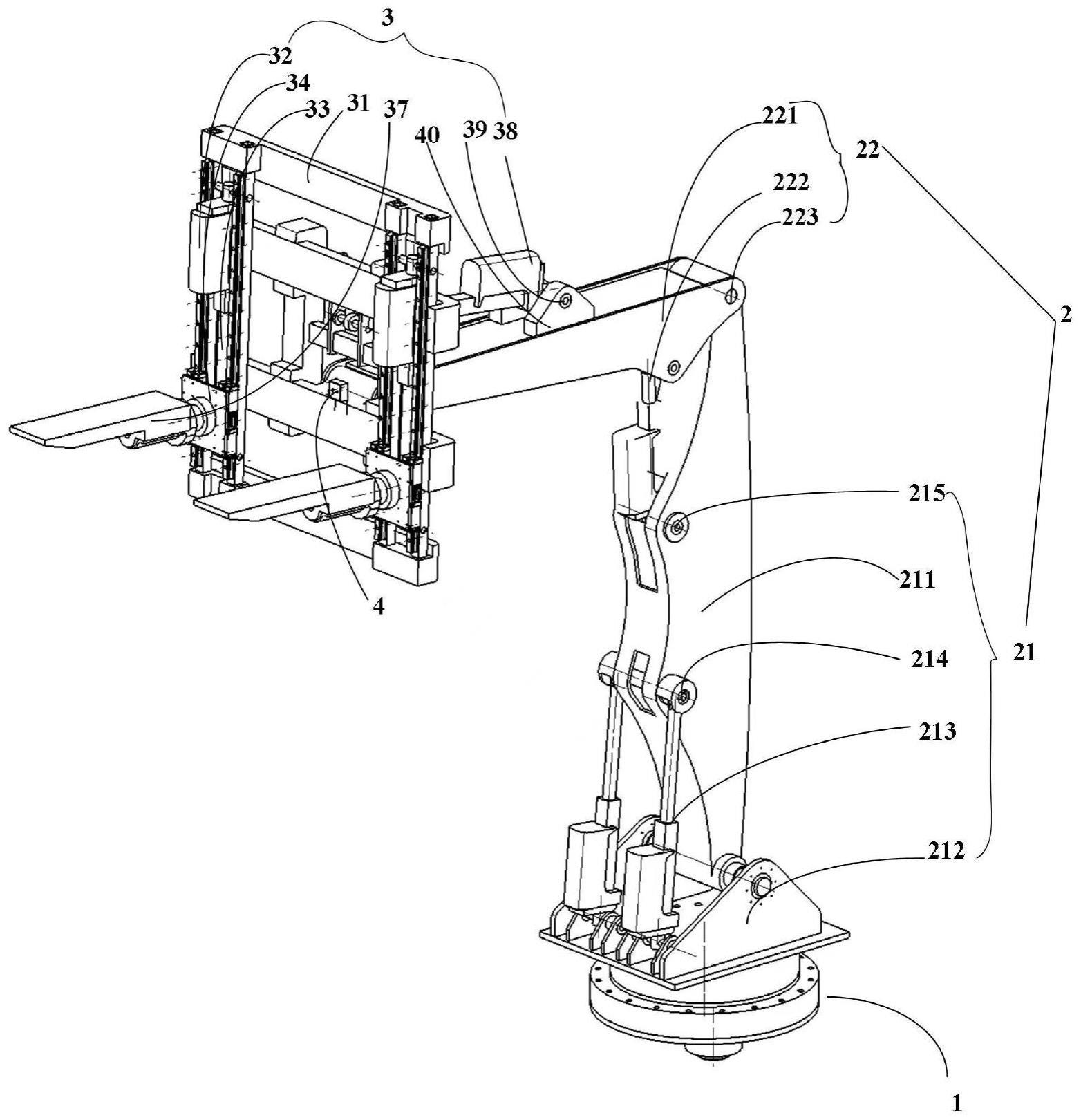
17、作为一个实施例,所述搬运机构包括:货叉门架、两个电动推杆、两根导轨、两块滑块、两个转接件、两根安装轴、两个货叉、转动机构和第一伸缩支撑机构;所述货叉门架安装于所述副臂端部,且安装有所述导轨;每一所述导轨各安装有各自对应的所述电动推杆和所述滑块;每一所述滑块通过各自对应的转接件连接有安装轴,每一所述安装轴各自对应安装有所述货叉;所述电动推杆用于与所述主控机电连接,以在所述主控机的控制下,通过调节两个电动推杆32的高度差调节对应两个货叉间的角度;所述转动机构一端安装于所述副臂端部,另一端部连接所述货叉门架,所述转动机构还与所述主控机电连接;所述第一伸缩支撑机构的执行端连接于所述货叉门架,输入端连接于所述副臂的第一设定位置处,并与所述主控机电连接,所述主控机,用于:
18、根据所述位姿信息、所述旋转平台当前的位姿信息、所述主臂当前的位姿信息、所述副臂当前的位姿信息和所述货叉当前的位姿信息,利用已建立的针对本搬运系统的运动模型,确定所述旋转平台、所述主臂、所述副臂和货叉各自对应的用于表示搬运所述目标物时所要执行的第一运动轨迹参数;
19、控制所述旋转平台、所述主臂和所述副臂按照各自对应的第一运动轨迹参数运动至用于可搬运目标物所期望的位置。
20、作为一个实施例,所述主臂包括主臂体、第二伸缩支撑机构和主臂安装支座;所述主臂体的一端部转动连接于所述主臂安装支座,另一端部转动连接于所述副臂端部,且所述主臂体的第二设定位置处还与所述第二伸缩支撑机构的执行端连接;所述主臂安装支座安装在所述旋转平台上;所述第二伸缩支撑机构的输入端固定安装于所述安装支座,且还与所述主控机电连接,所述主控机,用于:
21、控制所述旋转平台、所述第二伸缩支撑机构和所述副臂运行,使得所述旋转平台、所述主臂体和所述副臂按照各自对应的第一运动轨迹参数运动,以带动所述货叉运动至用于可搬运目标物所期望的位置。
22、作为一个实施例,所述副臂包括副臂体和第三伸缩支撑机构;所述副臂体的一端部转动连接于所述主臂体的端部,另一端部通过所述转动机构转动连接于所述货叉门架,且所述副臂体的第三设定位置处还与第三伸缩支撑机构的执行端连接;所述第三伸缩支撑机构的输入端转动连接于所述主臂体的第四设定位置处,且还与所述主控机电连接,所述主控机,用于:
23、控制所述旋转平台、所述第二伸缩支撑机构和所述第三伸缩支撑机构运行,使得所述旋转平台、所述主臂体和所述副臂体按照各自对应的第一运动轨迹参数运动,以带动所述货叉运动至用于可搬运目标物所期望的位置。
24、作为一个实施例,所述主臂体的端部转动连接副臂体的一端,所述旋转平台包括电机、电机减速器、齿轮轴、轴承、轴端法兰、回转支承固定平台、回转支承、驱动齿轮和主臂固定台;所述电机的输入端与所述主控机电连接,所述电机的输出端安装有所述电机减速器;所述电机减速器安装有所述齿轮轴;所述轴承通过所述轴端法兰套设在所述齿轮轴上;所述轴端法兰安装于所述回转支承固定平台;所述回转支承固定平台安装有所述回转支承;所述回转支承与所述驱动齿配合套设于所述齿轮轴;所述齿轮轴通过所述主臂固定台与所述主臂连接,所述主控机,用于:
25、控制所述电机、所述第二伸缩支撑机构和所述第三伸缩支撑机构运行,使得所述齿轮轴、所述主臂体和所述副臂体按照各自对应的第一运动轨迹参数运动,以带动所述货叉运动至用于可搬运目标物所期望的位置。
26、作为一个实施例,所述主臂还包括第一转动轴,所述副臂还包括:第二转动轴,所述搬运机构还包括:第三转动轴,所述主臂体的一端部通过所述第一转动轴转动连接于所述主臂安装支座,所述副臂通过所述第二转动轴转动连接于所述主臂体的另一端部,所述搬运机构通过所述第三转动轴转动连接于所述副臂体的另一端部,所述主控机按照如下表达式,确定所述旋转平台、所述主臂、所述副臂和搬运机构各自对应的用于表示搬运所述目标物时所要执行的第一运动轨迹参数;
27、所述表达式为:
28、θ1=arctan(ly/lx);θ2=β2+β4+β5;θ4=θ234-θ2-θ3;θ5=arctan(nxsinθ1-nysinθ1)/(pxcosθ1-pycosθ1)
29、其中,t为货叉前端部定位点相对于机械臂基准坐标系的位姿变换矩阵,nx为货叉前端部坐标系中的x轴在基坐标系中x轴分量,ny为货叉前端部坐标系中的y轴在基坐标系中x轴的分量,nz为货叉前端部在坐标系中的z轴在基坐标系中x轴的分量,px为货叉前端部坐标系中的x轴在基坐标系中y轴的分量,py为货叉前端部坐标系中的y轴在基坐标系中y轴的分量,pz为货叉前端部坐标系中的z轴在基坐标系中z轴的分量,ax为货叉前端部坐标系中的x轴在基坐标系中z轴的分量,ay为货叉前端部坐标系中的y轴在基坐标系中z轴的分量,az为货叉前端部坐标系中的z轴在基坐标系中z轴的分量,lx为货叉前端部坐标系原点在基坐标系中x轴的分量,ly为货叉前端部坐标系原点在基坐标系中y轴的分量,lz为货叉前端部坐标系原点在主臂坐标系中z轴的分量,l2为主臂两转动轴中心线之间的长度,l3为副臂两转动轴中心线之间的长度,l4为副臂末端转动轴与货叉前端部定位点等效连杆,d1为主臂下部转动轴与副臂末端转动轴之间连线的长度,d2为主臂下部转动轴与货叉前端部定位点之间的连线的长度,β1为直线d2与从货叉前端部定位点引与地面垂直线的夹角,β2为β1的余角,β3为等效连杆l4与连线d2之间的夹角连线,β4为连线d1与连线d2之间的夹角,β5为连杆l2与连线d1之间的夹角,γ为连杆l4与从货叉前端部定位点引与地面垂直线的夹角,θ234为θ2、θ3和θ4之和,θ1为旋转平台连杆坐标系相对于基坐标系的旋转角度,θ2为主臂连杆坐标系相对于旋转平台连杆坐标系的旋转角度,θ3为副臂连杆坐标系相对于主臂连杆坐标系的旋转角度,θ4为门架连杆坐标系相对于副臂连杆坐标系的旋转角度,θ5为末端货叉坐标系相对于连杆l4坐标系的旋转角度。
30、作为一个实施例,所述第二伸缩支撑机构的数量为两个,每一第二伸缩支撑机构的执行端的端部设有与所述第一转动轴配合安装的套筒;
31、所述第一转动轴设置于所述主臂体的第二设定位置处,每一所述第二伸缩支撑机构作为执行端的套筒各自对应安装于所述第一转动轴的两端部;每一所述第二伸缩支撑机构的转入端各自对应安装于所述主臂安装支座上。
32、作为一个实施例,所述主臂还包括第四转动轴,所述搬运机构包括第五转动轴和转动轴安装支座,所述第一伸缩支撑机构和所述第三伸缩支撑机构的数量均为一个,所述第三伸缩支撑机构的执行端的端部设有与第二转动轴配合安装的套筒;
33、所述第四转动轴贯穿所述主臂体侧壁并设置于所述主臂体的第四设定位置处,所述第三伸缩支撑机构的输入端套设于所述第四转动轴并置于所述主臂体内,所述第三伸缩支撑机构作为执行端的套筒套设于所述第二转动轴并置于所述副臂的第三设定位置处;
34、所述转动轴安装支座安装于所述副臂中与所述第二转动轴相背的侧壁,所述第一伸缩支撑机构的输入端套设于所述第五转动轴;所述第一伸缩支撑机构的执行端连接于所述货叉门架。
35、另一方面,本技术实施例又提供了一种自动搬运平台,所述自动搬运平台包括上述任一实施例所述的搬运装置、主控机和运输车;
36、所述搬运装置安装于所述运输车的车身平台上;
37、所述主控机安装在所述运输车上。
38、可见,本技术实施例提供了一种自动搬运系统及平台,该自动搬运系统包括旋转平台、机械臂、搬运机构、定位器和主控机,机械臂的主臂安装在旋转平台上,副臂与主臂转动连接,搬运机构转动连接于副臂末端,定位器安装于搬运机构,主控机分别与主臂、副臂、旋转平台电连接,对已获取的定位器采集的目标物所在位置的位置信息进行分析,根据分析所得到的位姿信息、旋转平台当前的位姿信息、主臂当前的位姿信息、副臂当前的位姿信息和搬运机构当前的位姿信息,利用已建立的针对本搬运系统的运动模型,确定旋转平台、主臂、副臂和搬运机构各自对应的用于表示搬运目标物时所要执行的第一运动轨迹参数;控制旋转平台、主臂、副臂和搬运机构按照各自对应的第一运动轨迹参数运行,以搬运目标物。可见,本实施例提供的自动搬运系统结合机械臂的自由度和货叉门架的承载能力,采用独立控制的货叉升降,方便对与目标物的相对姿态进行微调,具体在自动搬运及对接工作中,定位器将采集的目标物的位置信息反馈至主控机,主控机分析该位置信息并根据分析得到的位姿信息计算旋转平台、主臂、副臂和搬运机构各自对应的第一运动轨迹参数,并指示旋转平台、主臂、副臂和搬运机构根据计算结果运动到待搬运物处对目标物进行搬运。应用本实施例提供的自动搬运机构无需人参与搬运,完全满足自动搬运需求,同时也避免了人参与其中的危险。
- 还没有人留言评论。精彩留言会获得点赞!