智能仓储机构及其控制方法与流程
本申请涉及医院布巾回收,具体涉及智能仓储机构及其控制方法。
背景技术:
1、医院作为一个特殊的场所,每天都要接待成百上千的患者,医院的环境对于病人和医院工作人员来说是很重要的,保证医院环境及物表清洁度,可有效降低病菌的交叉感染,有助于患者在清洁健康的环境快速康复。所以用于医院清洁的主要工具布巾的领用、清洗、消毒、归还等工作都提出了很高的要求。
2、目前医院在布巾清洗消毒后,都是放置在货架上进行存储,然后通过标签来标记科室和布巾信息,保洁人员来领用时,管理人员直接从货架上取走箱子并人工清点后给保洁人员,在此过程中很容易掉落部分布巾(掉落的布巾无法使用,需要重新清洗消毒),导致经常有布巾丢失需要重新补货。
3、因此,亟待一种智能仓储机构及其控制方法,不再需要单独的货架和储藏室来放置布巾,也不需要专门的工人来管理和清点布巾。
技术实现思路
1、本申请的目的是针对现有技术中存在的上述问题,提供了智能仓储机构及其控制方法。
2、为了实现上述申请目的,本申请采用了以下技术方案:智能仓储机构安装于医院布巾智能洗涤中心的下层区域,包括:
3、仓储区,设有多个用于放置箱体的放置位,且该仓储区顶部设有多个对应的箱体位置传感器;
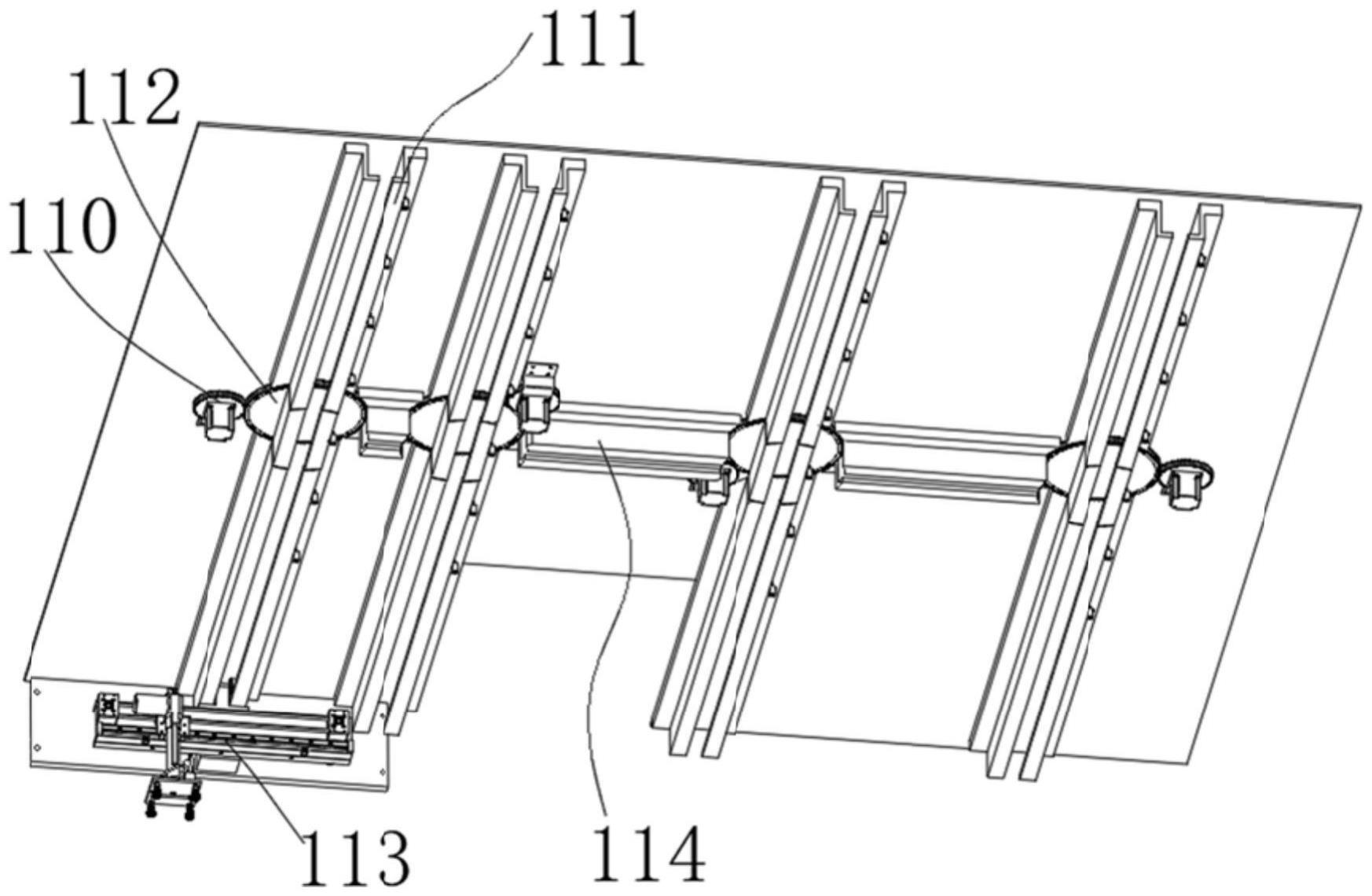
4、悬挂式导轨,设于仓储区顶部,多个悬挂式导轨平行设置,相邻两个平行的悬挂式导轨之间设有连接导轨;
5、旋转变向导轨,设于每个悬挂式导轨与连接导轨的对接处;
6、电机齿轮转向模块,与旋转变向导轨驱动连接,用于驱动旋转变向导轨转动,以实现旋转变向导轨与悬挂式导轨对接和旋转变向导轨与连接导轨对接的切换;
7、自驱动抓取模块,活动设于悬挂式导轨上,能够在悬挂式导轨、旋转变向导轨以及连接导轨上移动,以实现移动至各放置位上方进行抓取或放置箱体;
8、充电位置,设于自驱动抓取模块的初始位置,能够与自驱动抓取模块的弹性充电触点电连接并对自驱动抓取模块进行充电;
9、布巾领用出货区,设于医院布巾智能洗涤中心的取箱口内,用于供待取用的箱体放置,以方便用户取用。
10、进一步地,自驱动抓取模块包括用于供电的电池、与该电池电连接的主控电路模块、设于该主控电路模块上的弹性充电触点、与该主控电路模块电连接的轮毂电机轮、与该轮毂电机轮底部连接的直线运动模块、与该直线运动模块驱动连接的升降推杆以及安装于该升降推杆底部的抓取/吸取机构。自驱动抓取模块的各个组成部分和功能相互协作,实现了独立供电、自动化的运动控制、灵活的抓取和放置功能,从而提高了智能仓储机构的操作效率和准确性。
11、进一步地,主控电路模块集成有无线通信模块。主控电路模块集成无线通信模块可以实现远程监控和控制、数据传输和共享、远程故障诊断和维护,以及数据分析和优化。这样的设计提高了智能仓储机构的管理和操作的便利性、效率和智能化水平。
12、进一步地,抓取/吸取机构为夹爪式结构或吸盘式结构。
13、进一步地,抓取/吸取机构为吸盘式结构,吸盘式结构包括多个吸盘、与该吸盘连通的气泵,气泵和吸盘均安装于升降推杆的末端。抓取/吸取机构采用吸盘式结构具有可靠的抓取和吸取能力,适应性和灵活性强,能够快速抓取和释放箱体,并且具备高度可控性。这种设计使得智能仓储机构能够有效地处理箱体,并提高操作的准确性和效率。
14、进一步地,悬挂式导轨的数量少于放置位的行数或列数。通过少量的悬挂式导轨,可以在仓储区域内实现不同的箱体布局和配置。放置位的行数或列数可以超过悬挂式导轨的数量,这意味着可以根据实际需求将箱体布置成不同的行列组合,以适应不同大小和数量的箱体存储。且正是因为自驱动抓取模块的直线运动模块的设置,使得自驱动抓取模块本身就具有一定的移动范围,不需要把悬挂式导轨设置成对与放置位的行数或列数一致,如此可减少悬挂式导轨的数量,减少成本。
15、进一步地,直线运动模块驱动升降推杆移动的行程大于两个放置位。升降推杆大行程的移动也可以带来更好的空间利用效率。通过一次性跨越多个放置位,可以将箱体从较高的位置移动到较低的位置或反之,从而最大程度地利用垂直空间,提高仓储区域的存储密度和容量。
16、进一步地,悬挂式导轨、旋转变向导轨以及连接导轨上均设有与轮毂电机轮配合的滑槽。
17、进一步地,自驱动抓取模块还包括多个位置传感器,用于检测升降推杆在直线运动模块上的位置。
18、智能仓储机构控制方法,用于控制上述的智能仓储机构,包括以下步骤:
19、s00、响应于医院布巾智能洗涤中心的存储指令,自驱动抓取模块移动至封装完成的箱体上方下降吸取箱体;
20、s10、基于存储指令,将箱体运输至对应放置位上方下降放开箱体,自驱动抓取模块回到初始位置进行充电;
21、s20、将箱体的放置位的信息与箱体绑定并传输至医院布巾智能洗涤中心;
22、s30、响应于医院布巾智能洗涤中心的领用指令,自驱动抓取模块移动至目标箱体上方下降吸取箱体;
23、s40、基于领用指令,将箱体运输至布巾领用出货区上方下降放开箱体。
24、与现有技术相比,本申请具有以下有益效果:
25、1、本申请安装于医院布巾智能洗涤中心的下层区域,集成化设置,不再需要任何货架,也不需要专门的管理人员,更不需要专门用于放置货架的房间,大大降低了占用空间,可实现自动化方案。
26、2、本申请仓储区内设有多个放置位和箱体位置传感器,智能仓储机构能够自动将箱体放置在相应的位置,并通过传感器进行监测和管理。这样可以提高仓储效率,减少人工操作和管理的工作量。
27、3、本申请自驱动抓取模块位于悬挂式导轨上,可以在悬挂式导轨、旋转变向导轨和连接导轨上移动。它能够自动定位并抓取或放置箱体,实现自动化的装卸操作,提高工作效率和准确性。悬挂式导轨和连接导轨的设置使得箱体可以在仓储区内移动,并且通过旋转变向导轨的切换,能够实现箱体在不同导轨之间的转移和连接。这种设计可以更好地利用仓储区的空间,提高存储密度,节约仓储空间。结构简单、成本低,同时不会占用设备底部空间。
28、4、本申请自驱动抓取模块具有充电位置和弹性充电触点,可以在充电位置与弹性充电触点之间进行充电连接。这样,智能仓储机构能够自主进行充电,保证其充足的电量以支持长时间的运行。
29、5、本申请布巾领用出货区位于医院布巾智能洗涤中心的取箱口内,用户可以方便地取用放置在该区域的箱体,从而提供了便利的布巾领用服务。
技术特征:
1.智能仓储机构,安装于医院布巾智能洗涤中心的下层区域,其特征在于,包括:
2.根据权利要求1所述的智能仓储机构,其特征在于,所述自驱动抓取模块包括用于供电的电池、与该电池电连接的主控电路模块、设于该主控电路模块上的弹性充电触点、与该主控电路模块电连接的轮毂电机轮、与该轮毂电机轮底部连接的直线运动模块、与该直线运动模块驱动连接的升降推杆以及安装于该升降推杆底部的抓取/吸取机构。
3.根据权利要求2所述的智能仓储机构,其特征在于,所述主控电路模块集成有无线通信模块。
4.根据权利要求2所述的智能仓储机构,其特征在于,所述抓取/吸取机构为夹爪式结构或吸盘式结构。
5.根据权利要求4所述的智能仓储机构,其特征在于,所述抓取/吸取机构为吸盘式结构,吸盘式结构包括多个吸盘、与该吸盘连通的气泵,所述气泵和所述吸盘均安装于所述升降推杆的末端。
6.根据权利要求2所述的智能仓储机构,其特征在于,所述悬挂式导轨的数量少于放置位的行数或列数。
7.根据权利要求2所述的智能仓储机构,其特征在于,所述直线运动模块驱动所述升降推杆移动的行程大于两个放置位。
8.根据权利要求2-7任意一项所述的智能仓储机构,其特征在于,所述悬挂式导轨、所述旋转变向导轨以及所述连接导轨上均设有与所述轮毂电机轮配合的滑槽。
9.根据权利要求2-7任意一项所述的智能仓储机构,其特征在于,所述自驱动抓取模块还包括多个位置传感器,用于检测所述升降推杆在所述直线运动模块上的位置。
10.智能仓储机构控制方法,其特征在于,用于控制权利要求2-9任意一项所述的智能仓储机构,包括以下步骤:
技术总结
本申请涉及智能仓储机构及其控制方法,该方案安装于医院布巾智能洗涤中心的下层区域,包括:仓储区,设有多个用于放置箱体的放置位,且该仓储区顶部设有多个对应的箱体位置传感器;悬挂式导轨,设于仓储区顶部,多个悬挂式导轨平行设置,相邻两个平行的悬挂式导轨之间设有连接导轨;旋转变向导轨,设于每个悬挂式导轨与连接导轨的对接处;电机齿轮转向模块,与旋转变向导轨驱动连接;自驱动抓取模块,活动设于悬挂式导轨上;充电位置,设于自驱动抓取模块的初始位置;布巾领用出货区,设于医院布巾智能洗涤中心的取箱口内。无需任何货架,显著降低了空间占用。
技术研发人员:盛烨红,庄振华,姜帆,王闯,应宏波,孙柳茵,施剑斌,程萌珠
受保护的技术使用者:杭州慧胜科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!