多点位送料机构及多点位送料方法与流程
本发明属于输送设备,涉及一种送料机构及送料方法,具体的说是涉及一种可实现多点位送料的送料机构及送料方法。
背景技术:
1、现有的饲料、食品、米面粮油等在物料加工的过程中需要转运物料,一般都是通过皮带机,刮板,绞龙,气力送料等设备进行点对点输送,输送方式单一,所使用的输送设备不能进行多点位多角度自由调整。对被输送的装载设备有长宽高尺寸以及位置等要求的限制,不能灵活布置。在输送物料的过程中由于受高低度影响,会造成物料的分级,扬尘等现象。不仅物料的品质不可控,而且会造成环境的污染。同时由于被输送的装载设备容积大小不一,会造成物料在输送的过程物料形成山顶状的堆积。容积内部的物料存放十分不均匀,需要人工再摊料平料,还需要不停地移动被装载设备的位置来调整输送的点位。整个物料输送过程费时费力,工作效率低,还会影响物料的品质。
技术实现思路
1、本发明针对目前物料输送过程中不能进行多点位多角度送料,且送料过程中物料容易造成堆积,输送效率低等不足,提出一种多点位送料机构及多点位送料方法,有效解决多点位多角度输送物料问题,提高送料智能化程度,提高输送效率,进一步满足多种工况使用需求。
2、本技术提供的多点位送料机构采用如下技术方案:
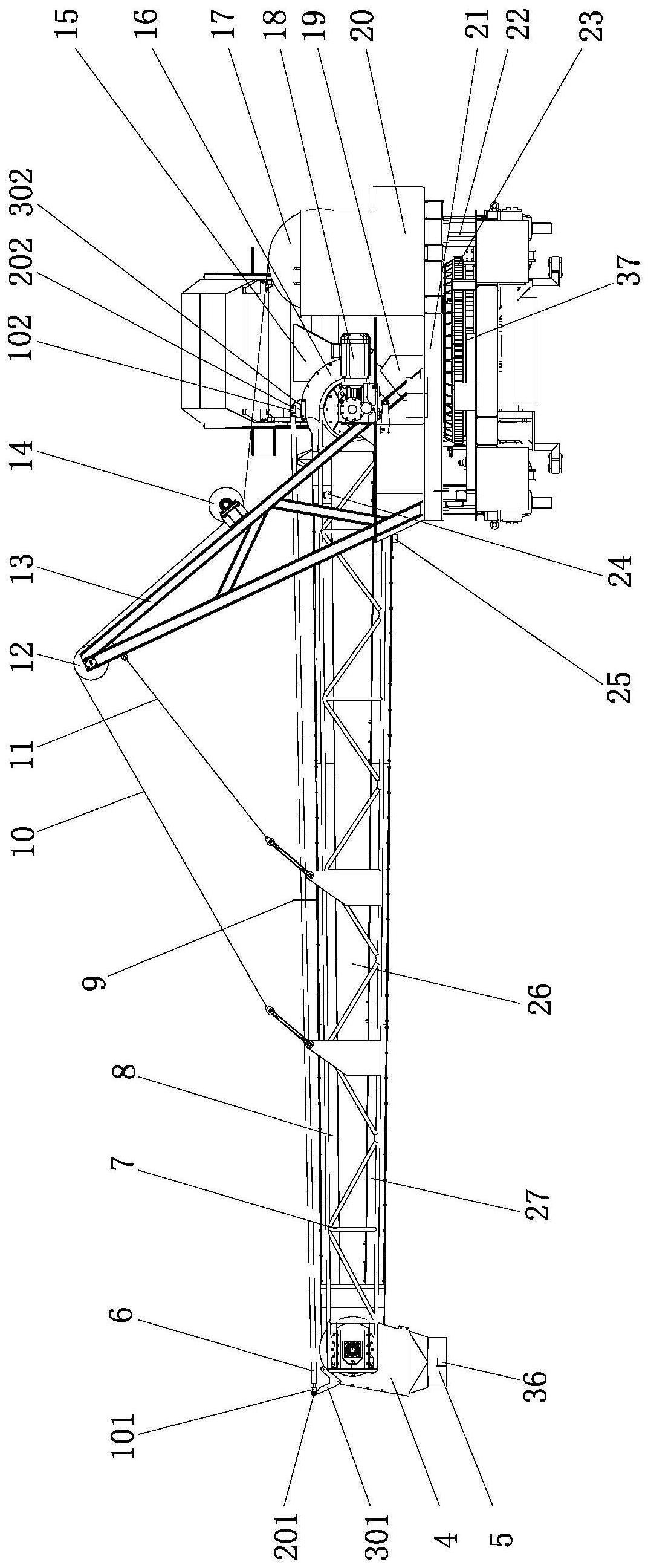
3、多点位送料机构,其特征在于,包括:旋转机构、升降机构和悬臂送料组;
4、所述升降机构与旋转机构连接固定,并随旋转机构的转动而转动;所述悬臂送料组与升降机构连接固定,并随升降机构的升降而升降;悬臂送料组在所述旋转机构与升降机构的共同作用下,实现多点位送料。
5、通过采用上述技术方案,可实现旋转作业,改变送料角度,又可进行升降作业,改变送料高度,实现多角度、多点位送料,并可解决出料口的物料堆积现象。
6、进一步的,所述旋转机构包括:
7、底座,与外部机架或轨道形成定位固定;
8、旋转平台,与底座形成转动连接,并相对底座形成角度调节。
9、通过采用上述技术方案,底座作为旋转机构的基础件,可与机架或输送轨道形成滑动连接,当确定具体工作位置后,底座与输送轨道连接固定,确保上方组件工作的稳定性;旋转平台既实现了上方组件的转动,起到了较好的承载作用。
10、进一步的,所述旋转平台包括:
11、减速电机,与底座连接固定,作为旋转平台的动力输入;
12、齿轮,与减速电机输出轴连接,实现动力的传递;
13、齿圈旋转支撑组,与齿轮形成啮合传动,在齿轮的驱动下带动整个旋转平台转动。
14、通过采用上述技术方案,利用减速电机和齿轮齿圈传动机构实现了旋转平台的转动,可获得较为准确的传动比,可以通过控制减速电机转子的转角,通过旋转平台角度的调节,实现送料旋转角度的精准控制。
15、进一步的,所述旋转机构还包括旋转角度检测传感器,设置于旋转平台的中心。
16、通过采用上述技术方案,以实现旋转机构角度的实时监测与调整。
17、进一步的,所述升降机构包括:
18、卷扬机,连接固定于旋转平台上,作为升降机构的动力输入;
19、支撑架组,连接固定于旋转平台上,以对悬臂送料组进行悬吊支撑,
20、牵引绳索,设置于支撑架组上,一端通过改向滑轮与卷扬机连接,另一端与悬臂送料组牵引连接。
21、通过采用上述技术方案,由卷扬机驱动牵引绳索带动悬臂送料组围绕驱动轴进行俯仰升降,通过控制卷扬机的收卷来确定悬臂送料组的摆动角度,实现送料俯仰升降角度的精准控制。
22、进一步的,所述升降机构还包括俯仰角度检测传感器,设置于悬臂送料组的下方。
23、通过采用上述技术方案,以实现悬臂送料组升降角度的监测与调整。
24、进一步的,所述悬臂送料组包括:
25、框架,对整个悬臂送料组进行支撑,在牵引绳索的牵引下以驱动轴为圆心进行旋转摆动;
26、旋转进料斗,设于悬臂送料组的进料端,与悬臂送料组形成旋转活动连接;
27、出料斗,设于悬臂送料组的出料端,与悬臂送料组形成活动连接;
28、传输组件,设置在悬臂送料组的内部,用于从旋转进料斗向出料斗方向的送料。
29、通过采用上述技术方案,旋转进料斗和出料斗均与悬臂送料组形成活动连接,利于进料和出料作业;悬臂送料组可与旋转机构和升降机构进行旋转和升降的协同运动,由传输组件进行物料的传输。
30、进一步的,所述悬臂送料组还包括平衡杆,连接设置于旋转进料斗与出料斗之间。
31、通过采用上述技术方案,通过平衡杆的设置,可始终保持出料口的垂直向下出料。
32、进一步的,所述悬臂送料组还包括激光雷达,设于出料斗的底部,以对出料口的高度及物料铺散面积的监测与反馈。
33、通过采用上述技术方案,可精确测量出料口下方与物料间距及平扫下方物料的铺散面积,以根据需要动态调整旋转机构和升降机构,以改变输送点角度及升降高度,避免物料堆积。
34、进一步的,所述悬臂送料组还包括吸尘口,设于悬臂送料组顶部,用于输送物料过程中的除尘作业。
35、通过采用上述技术方案,吸尘口可与外部的除尘机构连接作用,以解决物料输送过程中的扬尘现象。
36、本技术提供的多点位送料方法,方法如下:
37、悬臂送料组的旋转角度调节,齿轮在减速电机的带动下,驱动齿圈旋转支撑组正向旋转或反向旋转,带动旋转平台转动,旋转平台中心的旋转角度检测传感器反馈至控制单元并对旋转平台进行0-360°的旋转角度位置的实时调节;
38、悬臂送料组的升降角度调节,由卷扬机驱动牵引绳索,在牵引绳索的牵引作用下,悬臂送料组以驱动轴为圆心实现俯仰升降摆动,通过悬臂送料组下方的俯仰角度检测传感器反馈至控制单元并对悬臂送料组进行0~90°的俯仰角度位置的实时调节;
39、悬臂送料组的送料,旋转进料斗与悬臂送料组以驱动轴为圆心可旋转活动,通过悬臂减速电机带动传输组件向出料斗方向输送物料;通过出料口位置的激光雷达,精确测量出料口到下方物料的高度及平扫下方物料的铺散面积,动态反馈至控制单元,按需动态调整旋转机构和升降机构,以改变输送点角度及升降高度,避免物料堆积。
40、通过采用上述技术方案,实现了输送点位、物料高度的动态调整,满足了多点位多角度物料的输送,且解决了物料堆积的问题。
41、综上所述,本发明包括以下至少一种有益技术效果:
42、(1)本发明多点位送料机构结构紧凑,各运动机构之间工作原理清晰,可根据工况需求对悬臂送料组进行旋转角度、物料高度的调节,操作方便。
43、(2)本发明中各传感器的利用,有利于对各运动机构的工作状态进行反馈,并可通过控制单元实时调节各机构的运动状态,提高了整个送料机构的智能化作业程度。
44、(3)本发明中通过对悬臂送料组的升降控制,可以有效避免送料过程中物料堆积的现象,无需再通过人工进行摊料平料,减少操作强度,进一步提高送料效率。
45、(4)本发明悬臂送料组中平衡杆的利用,可始终保持出料口的垂直向下的平衡状态,确保垂直向下出料,利于激光雷达测距和反馈,以提高悬臂送料组的升降角度控制,提高出料的精度和效率。
- 还没有人留言评论。精彩留言会获得点赞!