货架调整自动拆分方法及系统与流程
本发明涉及货架搬运及调整,尤其涉及一种货架调整自动拆分方法及系统。
背景技术:
1、潜伏式移动机器人一般用于搬运货架、托盘等载具(以下统称货架)。在移动机器人的工作场景中存在各类的通道、停靠点、以及上下料点。不同的工作场景对于货架的姿态有各自的要求,如快速通道要求货架长边与通道方向平行;停靠点要求货架作业口朝向操作台;上下料点要求按序摆放等。
2、为了适应这类的需求,一方面移动机器人的顶板增加了旋转机构,另一方面要求机器人能自动完成货架的姿态调整。由于货架姿态要求是全过程的,因此货架姿态调整伴随着整个移动机器人的运动过程。
3、目前通常将移动机器人的货架姿态调整作为一个单独的任务进行独立配置,这样会导致一组上下料码头之间的搬运任务,可能会产生大量的货架姿态调整配置工作,就需要实施人员进行大量的任务链配置工作,同时任务管理也会需要面对大量的任务链中进行选择,造成效率低下。
技术实现思路
1、(一)要解决的技术问题
2、鉴于现有技术的上述缺点、不足,本发明提供一种货架调整自动拆分方法及系统,其解决了现有技术通过将移动机器人的货架姿态调整作为一个单独的任务进行独立配置导致一组搬运任务可能产生大量的货架姿态调整配置工作,效率低管理不便的技术问题。
3、(二)技术方案
4、为了达到上述目的,本发明采用的主要技术方案包括:
5、第一方面,本发明实施例提供一种货架调整自动拆分方法,包括以下步骤:
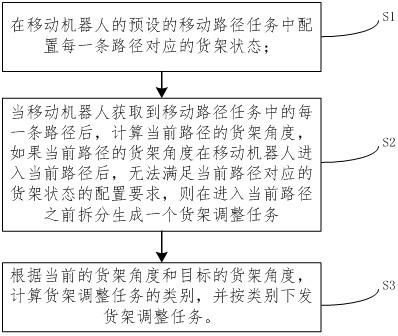
6、在移动机器人的预设的移动路径任务中配置每一条路径对应的货架状态;货架状态包括货架角度;
7、当移动机器人获取到移动路径任务中的每一条路径后,计算当前路径的货架角度,如果当前路径的货架角度在移动机器人进入当前路径后,无法满足当前路径对应的货架状态的配置要求,则在进入当前路径之前拆分生成一个货架调整任务;根据当前的货架角度和目标的货架角度,计算货架调整任务的类别,并按类别下发货架调整任务。。
8、本发明实施例提出的货架调整自动拆分方法,通过将货架状态配置在移动机器人的预设路径轨迹上,可以在执行移动路径轨迹的任务时,同步将货架配置的任务一并执行,不会产生大量的配置工作,也便于任务管理。
9、可选地,货架调整任务的类别,包括:整车旋转、背负调整以及自由调整;
10、整车旋转为移动机器人带货架旋转,背负调整为移动机器人旋转货架不旋转;自由调整为移动机器人和货架都旋转。
11、可选地,货架状态包括以下几类:前背、后背、左背、右背、平行背、垂直背、指定角度背负以及不约束角度背负;
12、前背为货架角度为0°;后背为货架角度为180°;左背为货架角度为90°;右背为货架角度为-90°;平行背为货架角度0°或180°;垂直背为货架角度90°或-90°;指定角度背负为货架角度为指定角度;不约束角度背负为货架角度为任意角度。
13、可选地,目标的货架角度为移动路径任务中配置的每一条路径对应的货架状态中的货架角度。
14、可选地,计算当前路径的货架角度,包括:
15、在移动机器人完成顶升背负后,识别当前的货架相对于顶板的角度theta0;同时记录此时顶板的里程计角度theta1,从而计算得到当前路径中此时的货架角度为beingtheta=theta0+theta1。
16、可选地,识别当前的货架相对于顶板的角度theta0,通过识别货架底部二维码获取。
17、可选地,在移动机器人的预设的移动路径任务中配置每一条路径对应的货架状态,还包括,当一条路径对应的货架状态未配置时,则表示将路径对应的货架状态配置为不约束的任意状态。
18、第二方面,本发明实施例提供一种货架调整自动拆分系统,包括:
19、任务配置模块,用于在移动机器人的预设的移动路径任务中配置每一条路径对应的货架状态;
20、任务拆分模块,用于当移动机器人获取到移动路径任务中的每一条路径后,计算当前路径的货架角度,如果当前路径的货架角度在移动机器人进入当前路径后,无法满足当前路径对应的货架状态的配置要求,则在进入当前路径之前拆分生成一个货架调整任务;
21、任务下发模块,用于根据当前的货架角度和目标的货架角度,计算货架调整任务的类别,并按类别下发货架调整任务。
22、第三方面,本发明实施例提供一种计算机系统,包括存储器和处理器;存储器,用于存储计算机程序;处理器,用于当执行计算机程序时,实现如上述任一项的货架调整自动拆分方法。
23、(三)有益效果
24、本发明的有益效果是:本发明的一种货架调整自动拆分方法及系统,通过将货架状态配置在移动机器人的预设路径轨迹上,可以在执行移动路径轨迹的任务时,同步将货架配置的任务一并执行,不会产生大量的配置工作,也便于任务管理。实际运行时,可以支持货架调整中的随意中断和恢复,而不用恢复考虑之前的状态。彻底避免了任务中断续接时的缓存问题,以及新任务开始时候的临界情况问题。
技术特征:
1.一种货架调整自动拆分方法,其特征在于,包括以下步骤:
2.如权利要求1所述的货架调整自动拆分方法,其特征在于:
3.如权利要求1所述的货架调整自动拆分方法,其特征在于:
4.如权利要求3所述的货架调整自动拆分方法,其特征在于:所述目标的货架角度为移动路径任务中配置的每一条路径对应的货架状态中的货架角度。
5.如权利要求1-4中任一项所述的货架调整自动拆分方法,其特征在于:所述计算当前路径的货架角度,包括:
6.如权利要求5所述的货架调整自动拆分方法,其特征在于:所述识别当前的货架相对于顶板的角度theta0,通过识别货架底部二维码获取。
7.如权利要求5所述的货架调整自动拆分方法,其特征在于:所述在移动机器人的预设的移动路径任务中配置每一条路径对应的货架状态,还包括,当一条路径对应的货架状态未配置时,则表示将所述路径对应的货架状态配置为不约束的任意状态。
8.一种货架调整自动拆分系统,其特征在于,包括:
9.一种计算机系统,其特征在于:包括存储器和处理器;所述存储器,用于存储计算机程序;所述处理器,用于当执行所述计算机程序时,实现如权利要求1-7任一项所述的货架调整自动拆分方法。
技术总结
本发明涉及一种货架调整自动拆分方法及系统,该方法包括以下步骤:在移动机器人的预设的移动路径任务中配置每一条路径对应的货架状态;货架状态包括货架角度;当移动机器人获取到移动路径任务中的每一条路径后,计算当前路径的货架角度,如果当前路径的货架角度在移动机器人进入当前路径后,无法满足当前路径对应的货架状态的配置要求,则在进入当前路径之前拆分生成一个货架调整任务;根据当前的货架角度和目标的货架角度,计算货架调整任务的类别,并按类别下发货架调整任务。本发明能显著提高移动机器人的任务执行效率,并降低任务部署难度。
技术研发人员:娄诗烨
受保护的技术使用者:杭州蓝芯科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!