一种麦克纳姆轮全向搬运智能机器人的控制方法与流程
本发明涉及搬运智能机器人领域,具体指有一种麦克纳姆轮全向搬运智能机器人的控制方法。
背景技术:
1、在物料自动化装卸运输中,物料从供应地装入集装箱,从集装箱卸到目的地,需要搬运、装载基本功能实施用户要求。在物流过程中,装载卸货是非常重要的环节,随着现代货物装载运输技术的快速发展,越来越多的用户需要实现物料快速装载转运。
2、为了实现快速搬运,例如中国专利申请cn201110286751.0,其在竖直方向上的多个货叉架,通过上侧的货叉架叉取货物,再抬升上侧的货叉架,接下来由下侧的货叉架进行叉取。或者,直接将多个货叉架调节到竖直排列的货物的对应高度后直接叉取多个货物。由于货物均集中在竖直方向上,其重心也只会影响到车体的前后重心,因此只需要简单的在车体上配置固定的配重块即可实现车体的平衡。现有技术并未实现左右两个货物同时搬运的智能机器人,申请人发现,在同时搬运左右两个货物时,一来现有的智能机器人没有该结构基础,二来在搬运两个货物时,由于货物的左右不平衡或者其重心偏移,容易造成智能机器人受力不均从而出现倾斜、侧翻等情况,同时如果并列设置的多个货叉架只叉取一个货物时,机器人会出现严重失衡。
3、针对上述的现有技术存在的问题设计一种麦克纳姆轮全向搬运智能机器人的控制方法是本发明研究的目的。
技术实现思路
1、针对上述现有技术存在的问题,本发明在于提供一种麦克纳姆轮全向搬运智能机器人的控制方法,能够有效解决上述现有技术存在的至少一个问题。
2、本发明的技术方案是:
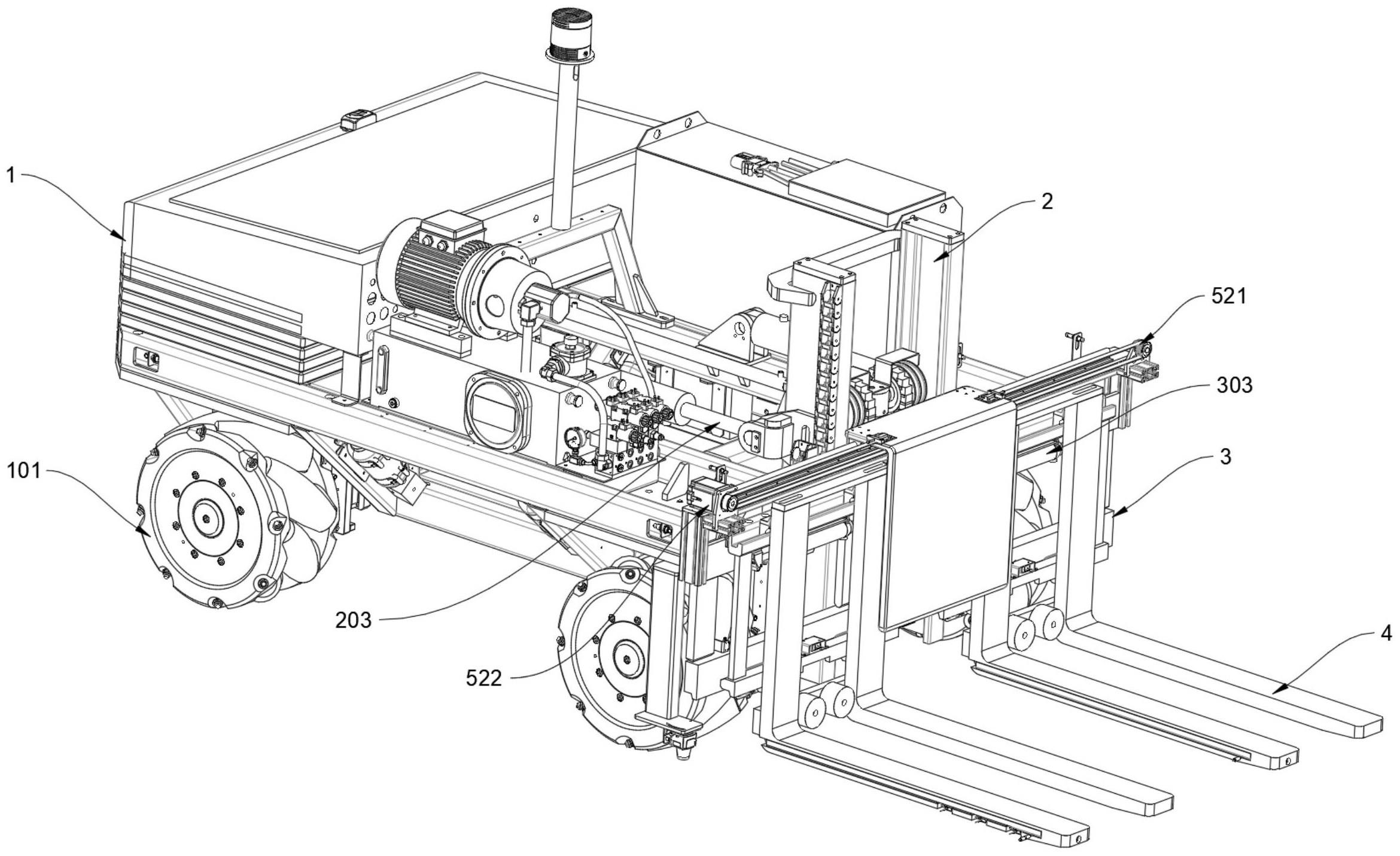
3、一种麦克纳姆轮全向搬运智能机器人的控制方法,所述搬运智能机器人包括:
4、车体,所述车体设置四个麦克纳姆轮;
5、门架,固定连接设置于所述车体的前端,所述门架包括纵向驱动机构;
6、侧移架,连接设置于所述门架前端,所述侧移架受所述纵向驱动机构驱动可沿着所述门架上下移动,所述侧移架包括两个横向驱动机构;
7、货叉架,数量与所述横向驱动机构的数量相同,横向并列设置于所述侧移架的前端,所述货叉架分别受其中一个所述横向驱动机构驱动可沿着所述侧移架左右移动;
8、配重组件,用于在若干所述货叉架叉起货物时,调节所述搬运智能机器人及货物的重心,使所述搬运智能机器人及货物的重心平衡;
9、所述控制方法包括:
10、当货叉架需要叉取两个并列的货物时,执行:
11、s11,驱动所述搬运智能机器人正对两个并列的货物,控制麦克纳姆轮使所述搬运智能机器人的左右中心线与两个并列的货物的中心线对齐;
12、s12,通过所述横向驱动机构调节货叉架的位置与两个货物相匹配,驱动所述搬运智能机器人的两个货叉架插入两个并列的货物下方,通过所述纵向驱动机构初步同时抬起两个货物;
13、s13,通过所述横向驱动机构驱动两个货叉架并垛,调节所述配重组件,使所述搬运智能机器人及货物的重心平衡后,进一步同时抬起两个货物;
14、当货叉架需要叉取一个货物时,执行:
15、s21,驱动所述搬运智能机器人靠近货物,控制麦克纳姆轮使所述搬运智能机器人的其中一个货叉架与货物对齐;
16、s22,驱动所述搬运智能机器人的其中一个货叉架插入货物下方,通过所述纵向驱动机构初步抬起货物;
17、s23,调节叉取有货物的货叉架活动至最靠近侧移架中间的位置,调节所述配重组件,使所述搬运智能机器人及货物的重心平衡后,进一步抬起货物。
18、进一步地,所述门架设置有车体连接座、倾俯连接座,所述车体连接座铰接至所述车体,所述车体设置有第一驱动缸,所述第一驱动缸的伸缩方向为前后方向,所述第一驱动缸的活塞缸铰接至所述倾俯连接座,从而驱动所述门架前倾或后仰,进而驱动所述货叉架前倾或后仰。
19、进一步地,所述配重组件包括前后配重组件,所述前后配重组件包括前后活动配重块,所述车体设置有前后配重块活动槽,所述前后配重块活动槽贯穿所述车体的左右中心线,所述前后配重块活动槽内设置有所述前后活动配重块,所述车体设置有第二驱动缸,所述第二驱动缸的伸缩方向为前后方向,所述第二驱动缸的活塞缸连接所述前后活动配重块。
20、进一步地,通过调节前后活动配重块的位置,调节所述智能机器人和/或货物的前后重心。
21、进一步地,当货叉架需要叉取两个并列的货物时,调节所述配重组件之后,使所述搬运智能机器人及货物的重心平衡之前,执行:
22、若只调节前后活动配重块的位置无法使前后重心平衡,则调节货叉架的仰角、前后活动配重块的位置,使货物和搬运智能机器人的重心后移并达到前后重心平衡。
23、进一步地,所述配重组件包括左右配重组件,所述左右配重组件设置于所述侧移架,所述左右配重组件包括开设于所述侧移架的导轨,所述导轨设置有通过电机驱动的同步带,所述同步带驱动设置有左右活动配重块。
24、进一步地,通过调节左右活动配重块的位置,调节所述智能机器人和/或货物的左右重心。
25、进一步地,当货叉架需要叉取两个并列的货物时,调节所述配重组件之后,使所述搬运智能机器人及货物的重心平衡之前,执行:
26、若只调节左右活动配重块的位置无法使左右重心平衡,则调节并垛后的两个货叉架左右位置、左右活动配重块的左右位置,使货物和搬运智能机器人的左右重心平衡。
27、进一步地,当货叉架需要叉取一个货物时,调节所述配重组件之后,使所述搬运智能机器人及货物的重心平衡之前,执行:
28、若只调节左右活动配重块的位置无法使左右重心平衡,调节左右活动配重块的位置、未叉取货物的货叉架的位置,使货物和搬运智能机器人的左右重心平衡。
29、因此,本发明提供以下的效果和/或优点:
30、本申请考虑了搬运智能机器人叉取货物后,货物的重量较大,搬运智能机器人的重心会产生变化。传统的搬运智能机器人只设置了一个货叉架,因此其只需要简单的在搬运智能机器人上设置固定的配重块。本申请可叉取的货物的数量为两个及以上,本实施例可叉取的货物为横向并排。本申请通过前后、左右两组配重组件,可以调节搬运智能机器人及货物的重心,从而达到其重心平衡的目的。
31、本申请考虑了货叉架叉取多个货物、单个货物的多种情况,通过多种工作状态进行调节重心,实现更好的重心平衡。
32、本申请通过调节货叉架的俯仰角辅助平衡前后重心,通过调节两个货叉架和左右配重装置进行综合左右的重心平衡。
33、应当明白,本发明的上文的概述和下面的详细说明是示例性和解释性的,并且意在提供对如要求保护的本发明的进一步的解释。
技术特征:
1.一种麦克纳姆轮全向搬运智能机器人的控制方法,其特征在于:所述搬运智能机器人包括:
2.根据权利要求1所述的一种麦克纳姆轮全向搬运智能机器人的控制方法,其特征在于:所述门架设置有车体连接座、倾俯连接座,所述车体连接座铰接至所述车体,所述车体设置有第一驱动缸,所述第一驱动缸的伸缩方向为前后方向,所述第一驱动缸的活塞缸铰接至所述倾俯连接座,从而驱动所述门架前倾或后仰,进而驱动所述货叉架前倾或后仰。
3.根据权利要求2所述的一种麦克纳姆轮全向搬运智能机器人的控制方法,其特征在于:所述配重组件包括前后配重组件,所述前后配重组件包括前后活动配重块,所述车体设置有前后配重块活动槽,所述前后配重块活动槽贯穿所述车体的左右中心线,所述前后配重块活动槽内设置有所述前后活动配重块,所述车体设置有第二驱动缸,所述第二驱动缸的伸缩方向为前后方向,所述第二驱动缸的活塞缸连接所述前后活动配重块。
4.根据权利要求3所述的一种麦克纳姆轮全向搬运智能机器人的控制方法,其特征在于:通过调节前后活动配重块的位置,调节所述智能机器人和/或货物的前后重心。
5.根据权利要求4所述的一种麦克纳姆轮全向搬运智能机器人的控制方法,其特征在于:当货叉架需要叉取两个并列的货物时,调节所述配重组件之后,使所述搬运智能机器人及货物的重心平衡之前,执行:
6.根据权利要求1所述的一种麦克纳姆轮全向搬运智能机器人的控制方法,其特征在于:所述配重组件包括左右配重组件,所述左右配重组件设置于所述侧移架,所述左右配重组件包括开设于所述侧移架的导轨,所述导轨设置有通过电机驱动的同步带,所述同步带驱动设置有左右活动配重块。
7.根据权利要求6所述的一种麦克纳姆轮全向搬运智能机器人的控制方法,其特征在于:通过调节左右活动配重块的位置,调节所述智能机器人和/或货物的左右重心。
8.根据权利要求7所述的一种麦克纳姆轮全向搬运智能机器人的控制方法,其特征在于:当货叉架需要叉取两个并列的货物时,调节所述配重组件之后,使所述搬运智能机器人及货物的重心平衡之前,执行:
9.根据权利要求7所述的一种麦克纳姆轮全向搬运智能机器人的控制方法,其特征在于:当货叉架需要叉取一个货物时,调节所述配重组件之后,使所述搬运智能机器人及货物的重心平衡之前,执行:
技术总结
本发明涉及一种麦克纳姆轮全向搬运智能机器人的控制方法,所述搬运智能机器人包括:车体,所述车体设置四个麦克纳姆轮;货叉架,数量与所述横向驱动机构的数量相同,横向并列设置于所述侧移架的前端;配重组件;所述控制方法包括:当货叉架需要叉取两个并列的货物时,执行:S11,驱动所述搬运智能机器人正对两个并列的货物,控制麦克纳姆轮使所述搬运智能机器人的左右中心线与两个并列的货物的中心线对齐;S12,通过所述横向驱动机构调节货叉架的位置与两个货物相匹配,通过所述纵向驱动机构初步同时抬起两个货物;S13,调节所述配重组件,使所述搬运智能机器人及货物的重心平衡后,进一步同时抬起两个货物。
技术研发人员:林伟,林贵霖,杨小龙,邓晓强,彭恩奇,陈庆通,陈煜,吴桦奎
受保护的技术使用者:龙合智能装备制造有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!