液压补偿调平机构的控制方法、装置、设备及介质与流程
本发明涉及机械控制,尤其涉及一种液压补偿调平机构的控制方法、装置、设备及介质。
背景技术:
1、作业装置精确调平是伸缩臂叉装车至关重要的性能指标。由于并联油缸补偿四连杆调平机构结构简单、成本较低并且机构稳定,在伸缩臂型车上应用广泛。并联油缸补偿六连杆调平机构的调平原理在根本上与并联油缸补偿四连杆调平机构一致,都是将上调平油缸和下调平油缸进行并联,来实现作业装置的调平。即货叉在臂架变幅过程中始终保持与基面平行或者恒定角度。并联油缸补偿调平机构的设计难点在于,需要构造合理的连杆长度,来减小货叉在臂架变幅过程中产生的角度波动。其中角度的波动范围也即调平偏差。
2、目前,现有技术主要利用遗传算法对液压补偿调平机构参数进行优化,以得到较小的调平偏差。传统的遗传算法虽然可以实现液压补偿调平机构参数的优化,但是迭代收敛速度慢,输出的参数误差较大,难以实现对液压补偿调平机构的精准控制。
技术实现思路
1、本发明提供了一种液压补偿调平机构的控制方法、装置、设备及介质,以解决遗传算法输出的液压补偿调平机构参数误差大、调平机构控制精确度低等问题,可以在提高液压补偿调平机构参数准确性的同时,加快计算过程中的迭代收敛速度,以达到良好的控制效果。
2、根据本发明的一方面,提供了一种液压补偿调平机构的控制方法,所述方法包括:
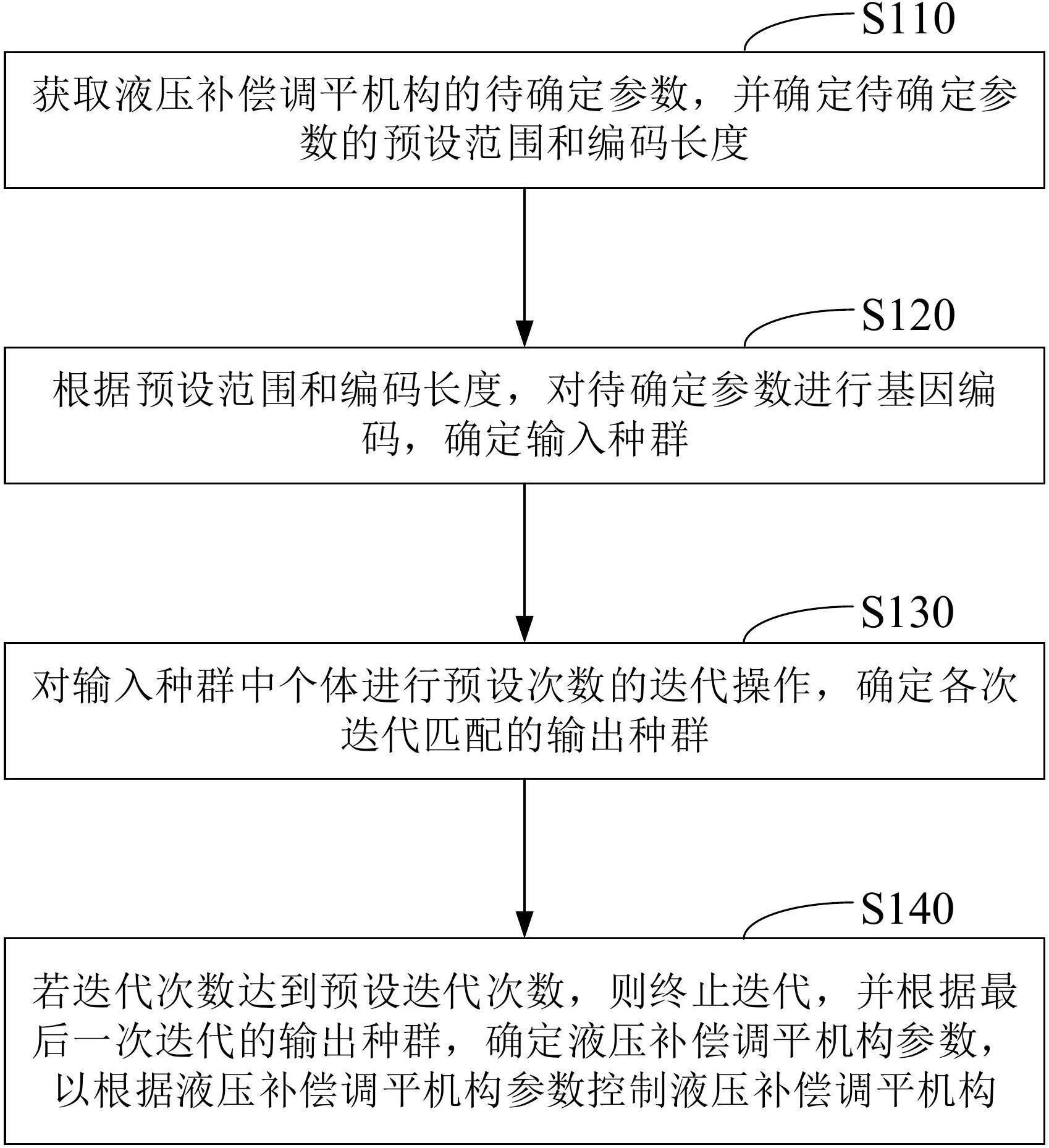
3、获取液压补偿调平机构的待确定参数,并确定待确定参数的预设范围和编码长度;其中,所述待确定参数包括连杆长度、油缸长度、臂架变幅角度、连杆夹角以及上调平油缸与下调平油缸传动比;
4、根据预设范围和编码长度,对待确定参数进行基因编码,确定输入种群;
5、对输入种群中个体进行预设次数的迭代操作,确定各次迭代匹配的输出种群;其中,所述迭代操作包括交叉操作、变异操作以及选择操作;所述变异操作是基于种群变异概率和个体变异概率实现的;
6、若迭代次数达到预设迭代次数,则终止迭代,并根据最后一次迭代的输出种群,确定液压补偿调平机构参数,以根据液压补偿调平机构参数控制液压补偿调平机构。
7、可选的,本次迭代操作的种群变异概率是基于目标个体数量以及本次迭代操作的输入种群中个体数量确定的;本次迭代操作的个体变异概率是基于本次迭代操作的输入种群中个体的变异位置以及预设次数迭代操作的输入种群中个体的变异位置确定的。
8、可选的,所述对输入种群中个体进行预设次数的次迭代操作,确定各次迭代匹配的输出种群,包括:
9、若本次迭代为初始迭代,则根据预先设置的适应度函数,计算输入种群中个体的适应度,并根据适应度,确定目标个体;若本次迭代非初始迭代,则根据上一次迭代的输出种群中个体的适应度,确定目标个体;
10、根据目标个体和初始迭代的输入种群,确定待变异种群,并根据单点变异算子,对待变异种群进行变异操作,生成待交叉种群;其中,所述单点变异算子是根据本次迭代操作的种群变异概率以及本次迭代操作的个体变异概率确定的;
11、根据单点交叉算子,对待交叉种群进行交叉操作,并计算交叉后种群中个体的适应度;
12、根据交叉后种群中个体的适应度以及范围选择算子,确定本次迭代匹配的输出种群。
13、可选的,所述目标个体为目标种群中适应度最大的个体;
14、所述根据目标个体和初始迭代的输入种群,确定待变异种群,并根据单点变异算子,对待变异种群进行变异操作,生成待交叉种群,包括:
15、将目标个体的适应度以及初次迭代的输入种群中个体的适应度进行适应度排序,根据适应度排序结果,确定待变异种群;
16、根据目标个体数量以及本次迭代操作的输入种群中个体数量,确定种群变异概率,并根据本次迭代操作的输入种群中个体的变异位置以及预设次数迭代操作的输入种群中个体的变异位置,确定个体变异概率;
17、根据种群变异概率以及个体变异概率,确定本次迭代操作的单点变异算子,根据单点变异算子,对待变异种群进行变异操作,生成本次迭代操作的待交叉种群。
18、可选的,所述根据目标个体数量以及本次迭代操作的输入种群中个体数量,确定种群变异概率,包括:
19、将目标个体数量与本次迭代操作的输入种群中个体数量的比值作为种群变异概率。
20、可选的,所述根据本次迭代操作的输入种群中个体的变异位置以及预设次数迭代操作的输入种群中个体的变异位置,确定个体变异概率,包括:
21、根据本次迭代操作的输入种群中个体的变异位置以及预设次数迭代操作的输入种群中个体的变异位置,确定变异位置评估结果;
22、若根据变异位置评估结果确定存在目标个体历次迭代操作中均在预设位置发生至少一次变异,则确定预设位置的变异概率为第一变异概率,除预设位置以外的其它编码位置的变异概率为第二变异概率。
23、可选的,所述根据预设范围和编码长度,对待确定参数进行基因编码,确定输入种群,包括:
24、根据待确定参数的预设范围,基于均匀插值法,确定多个待编码参数;
25、根据编码长度,对待编码参数进行基因编码,得到各待编码参数匹配的个体;
26、根据各待编码参数匹配的个体,确定输入种群。
27、根据本发明的另一方面,提供了一种液压补偿调平机构的控制装置,该装置包括:
28、范围确定模块,用于获取液压补偿调平机构的待确定参数,并确定待确定参数的预设范围和编码长度;其中,所述待确定参数包括连杆长度、油缸长度、臂架变幅角度、连杆夹角以及上调平油缸与下调平油缸传动比;
29、输入种群确定模块,用于根据预设范围和编码长度,对待确定参数进行基因编码,确定输入种群;
30、输出种群确定模块,用于对输入种群中个体进行预设次数的迭代操作,确定各次迭代匹配的输出种群;其中,所述迭代操作包括交叉操作、变异操作以及选择操作;所述变异操作是基于种群变异概率和个体变异概率实现的;
31、参数确定模块,用于若迭代次数达到预设迭代次数,则终止迭代,并根据最后一次迭代的输出种群,确定液压补偿调平机构参数,以根据液压补偿调平机构参数控制液压补偿调平机构。
32、根据本发明的另一方面,提供了一种电子设备,所述电子设备包括:
33、至少一个处理器;以及与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行本发明任一实施例所述的液压补偿调平机构的控制方法。
34、根据本发明的另一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现本发明任一实施例所述的液压补偿调平机构的控制方法。
35、本发明实施例的技术方案,通过获取液压补偿调平机构的待确定参数,然后根据待确定参数的预设范围和编码长度,对待确定参数进行基因编码,确定输入种群;再对输入种群中个体进行预设次数的迭代操作,确定各次迭代匹配的输出种群;其中,所述迭代操作包括交叉操作、变异操作以及选择操作;所述变异操作是基于种群变异概率和个体变异概率实现的;若迭代次数达到预设迭代次数,则终止迭代,并根据最后一次迭代的输出种群,确定液压补偿调平机构参数,以根据液压补偿调平机构参数控制液压补偿调平机构。该技术方案解决了遗传算法输出的液压补偿调平机构参数误差大、调平机构控制精确度低等问题,可以在提高液压补偿调平机构参数准确性的同时,加快计算过程中的迭代收敛速度,以达到良好的控制效果。
36、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
- 还没有人留言评论。精彩留言会获得点赞!