立体料库及钢轨物料存取控制方法
本发明涉及物料存储,尤其是涉及一种立体料库及钢轨物料存取控制方法。
背景技术:
1、对于道岔钢轨原料和道岔钢轨成品而言,钢轨的长度较长、重量较大、轨排平整度差,如对于100米长度的钢轨,现有技术中的立体料架难以存放钢轨。
2、现有技术中,道岔钢轨的原料、成品在存放时,采用铁路平板车运输,人工将钢轨按“排”进行码垛摆放在露天环境中或室内地面上,在码垛时,码放完一排钢轨后,需要在其上铺放多条垫块,将才能在其上继续摆放另一排钢轨继续摆放在上层,垫块较长较重,摆放效率低,人工操作存在安全隐患,此外为了保证钢轨码垛的稳定性,逐层减少钢轨的数量,采用梯形堆放。
3、本申请人发现现有技术至少存在以下技术问题:现有技术的料架难以存放长钢轨原料或成品,钢轨上料时,使用人工码垛的方式进行钢轨排上料时,将钢轨一层层摆放在料库的地面上,钢轨摆放不规整,人工铺放垫块码垛效率低下;在取用料库中的钢轨原料或成品时,人工撤垫块,存在钢轨垫块坠落的风险,下料效率低,安全隐患大。
技术实现思路
1、本发明的目的在于提供一种立体料库及钢轨物料存取控制方法,以解决现有技术中存在的钢轨原料或成品直接堆垛于料库的地面上,多层堆叠需人工铺放或撤垫块,导致料库中上下料时工作效率低、空间利用率低、安全隐患大的技术问题。本发明提供的诸多技术方案中的优选技术方案所能产生的诸多技术效果详见下文阐述。
2、为实现上述目的,本发明提供了以下技术方案:
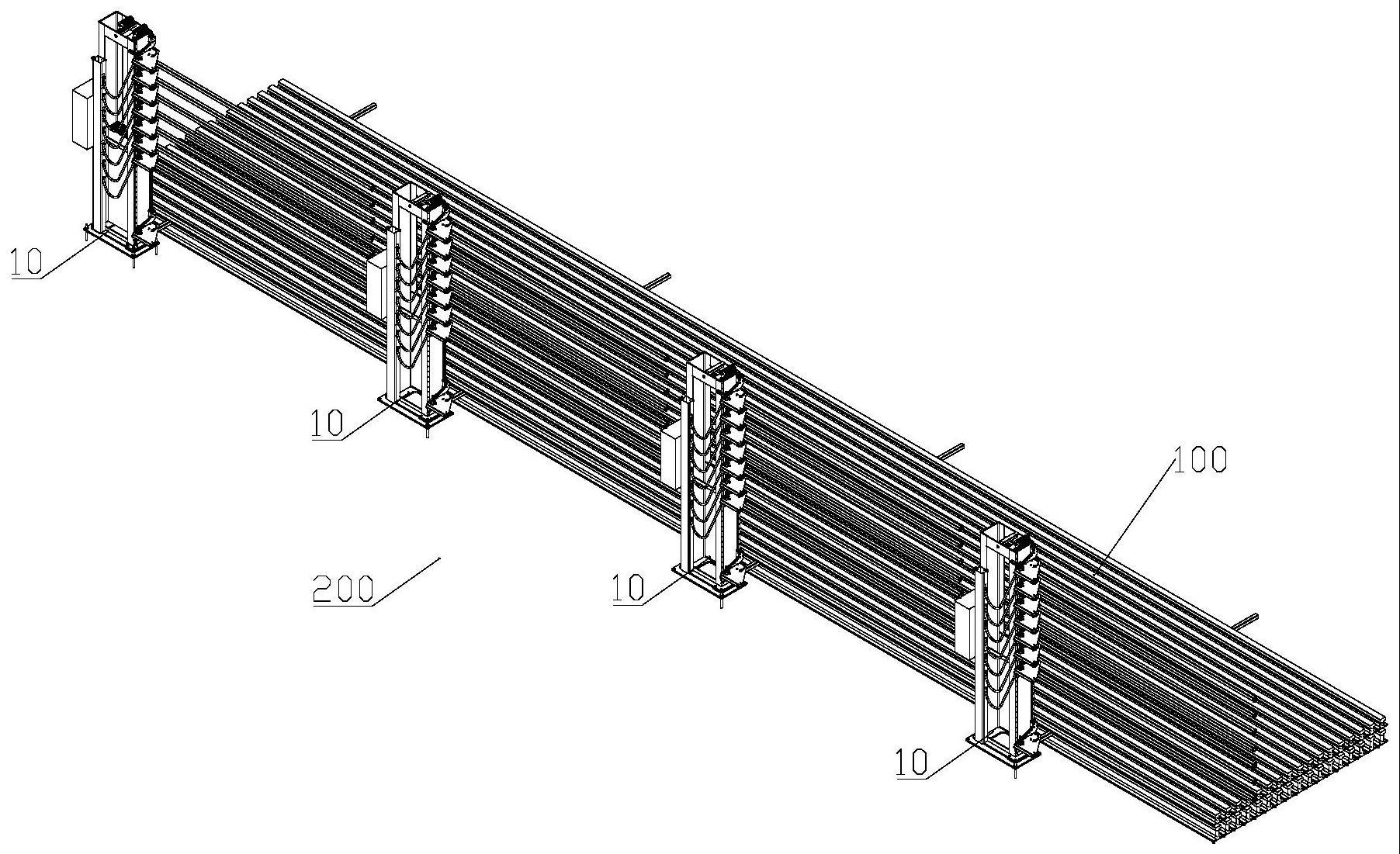
3、本发明提供的立体料库,包括位于原料存储工位上的原料存储单元,和/或位于成品存储工位上的成品存储单元,其中:所述原料存储单元、所述成品存储工单元的数量为一个或两个以上,所述原料存储单元和/或所述成品存储单元上设置有两个以上立体料架,相邻所述立体料架之间存在有安装间距;
4、所述立体料架包括立柱、悬臂组件、牵引部和无动力吊放部,其中:
5、所述悬臂组件沿所述立柱的高度方向设置有两组以上,每组所述悬臂组件均与至少一个所述无动力吊放部相连接;
6、所述立柱上设置有滑轮组件,所述牵引部绕于所述滑轮组件上,且所述牵引部的两端分别与对应所述悬臂组件、所述无动力吊放部相连接,所述无动力吊放部能拉动对应未承托物料的所述悬臂组件上升,且承托有物料的所述悬臂组件能在重力作用下下降至与下层物料相接触的位置。
7、优选的,位于同一所述原料存储工位中的所有所述立体料架沿同一直线间隔布置,位于同一所述成品存储工位中的所有所述立体料架沿同一直线间隔布置。
8、优选的,所述立柱的至少一侧为与悬臂组件滑动连接的装配侧,所述悬臂组件上设置有牵引孔位,所述无动力吊放部、所述滑轮组件、所述牵引孔位均沿所述装配侧的宽度方向布置,并一一对应的设置。
9、优选的,所述无动力吊放部为块状或片状结构,所述立柱内设置有空腔体,所述无动力吊放部均位于所述空腔体内,所述无动力吊放部上设置有用以与所述牵引部连接的吊环。
10、优选的,所述悬臂组件包括滑动架和悬臂,所述滑动架与所述立柱滑动连接,所述悬臂一端与所述滑动架转动连接,另一端悬空,所述悬臂在水平方向上可转动的设置,从而在零位和储料位之间移动。
11、优选的,所述悬臂组件还包括驱动装置,所述驱动装置的固定端与所述滑动架转动连接,其伸缩端通过轴体与所述悬臂的端部转动连接;
12、所述滑动架上设置有弧形限位槽,所述轴体伸入所述弧形限位槽内,并在所述驱动装置的驱动下带动所述悬臂沿所述弧形限位槽移动。
13、优选的,所述弧形限位槽的两端分别设置有第一限位开关、第二限位开关和第三限位开关,所述第一限位开关用于检测所述悬臂是否处于零位,所述第二限位开关用于检测所述悬臂是否处于储料位,所述悬臂组件上设置有第三限位开关,所述第三限位开关用于检测所述悬臂组件是否上升到位;
14、所述立体料架还包括控制单元,所述控制单元与所述第一限位开关、所述第二限位开关、所述第三限位开关和所述驱动装置电连接,用于在所述悬臂处于零位或储料位或上升到位时控制对应所述驱动装置开始或停止工作。
15、优选的,所述悬臂组件与所述立柱可拆卸连接;
16、所述无动力吊放部包括本体件和更换件,所述本体上设置有承接槽,所述更换件上设置有卡块,所述卡块能伸入所述承接槽中并滑动至与所述承接槽相卡接的位置,从而将不同重量的所述更换件与所述本体件相连接。
17、优选的,所述立体料库还包括起重系统和控制单元,其中:
18、所述控制单元与所述起重系统电连接,用于根据入库指令控制所述起重系统带动原料移动至目标所述原料存储单元,或,根据出库指令控制所述起重系统提起所述成品存储单元上的成品。
19、本发明还提供了一种基于上述立体料库的钢轨物料存取控制方法,该方法包括:
20、物料上料时:
21、判断目标原料存储工位或成品存储工位是否为空,若是,控制起重系统将物料转运至目标原料存储工位或成品存储工位,并将物料下放至最底层;
22、若否,控制起重系统将物料转运至目标原料存储工位或成品存储工位,控制所述原料存储工位或成品存储工位上同层的所述悬臂组件运动至储料位,并控制起重系统将物料下放至所述悬臂组件上,使位于目标所述原料存储工位或所述成品存储工位上同层的所述悬臂组件共同承托物料,共同承托有物料的所述悬臂组件在重力作用下下降至与下层物料相接触的位置;
23、上料完成时更新原料存储工位或成品存储工位的存储数据;
24、物料下料时:
25、控制起重系统移动至原料存储工位或成品存储工位;
26、控制起重系统提升最上层物料;
27、检测悬臂组件是否移动至最上层或与上层悬臂组件相接触的位置;
28、若是,控制该层悬臂组件转动至零位;
29、下料完成时更新原料存储工位或成品存储工位的存储数据。
30、本发明提供的立体料库及钢轨物料存取控制方法,与现有技术相比,具有如下有益效果:工件(如道岔钢轨)的原料可以存储在原料存储单元,成品存储在成品存储单元,该立体料库的立体料架,采用无动力吊放部与悬臂组件的配合结构,能够节省成本,无需使用大负载的驱动装置;且该结构自适应性的调整两层悬臂组件之间的间距,可以适应并满足不同型号、不同厚度的工件存放,如可以适应不同轨高、不平轨底、长轨大变形的起重超长钢轨排存放,节省了存储空间,增加了存储容量;使用悬臂组件自动支撑钢轨排,降低了劳动强度,消除了人工铺放及撤除垫块的安全隐患。起重系统根据生产需求携带原料入库或携带成品出库,方便物料的存取。该钢轨物料存取控制方法,使用起重系统与立体料库的立体料架协同作业,可实现了超重、大变形、超长物料(100米以上)的方便存取,提升了效率。
技术特征:
1.一种立体料库,其特征在于,包括位于原料存储工位上的原料存储单元,和/或位于成品存储工位上的成品存储单元,其中:所述原料存储单元、所述成品存储工单元的数量为一个或两个以上,所述原料存储单元和/或所述成品存储单元上设置有两个以上立体料架,相邻所述立体料架之间存在有安装间距;
2.根据权利要求1所述的立体料库,其特征在于,位于同一所述原料存储工位中的所有所述立体料架沿同一直线间隔布置,位于同一所述成品存储工位中的所有所述立体料架沿同一直线间隔布置。
3.根据权利要求1所述的立体料库,其特征在于,所述立柱的至少一侧为与悬臂组件滑动连接的装配侧,所述悬臂组件上设置有牵引孔位,所述无动力吊放部、所述滑轮组件、所述牵引孔位均沿所述装配侧的宽度方向布置,并一一对应的设置。
4.根据权利要求1所述的立体料库,其特征在于,所述无动力吊放部为块状或片状结构,所述立柱内设置有空腔体,所述无动力吊放部均位于所述空腔体内,所述无动力吊放部上设置有用以与所述牵引部连接的吊环。
5.根据权利要求1所述的立体料库,其特征在于,所述悬臂组件包括滑动架和悬臂,所述滑动架与所述立柱滑动连接,所述悬臂一端与所述滑动架转动连接,另一端悬空,所述悬臂在水平方向上可转动的设置,从而在零位和储料位之间移动。
6.根据权利要求5所述的立体料库,其特征在于,所述悬臂组件还包括驱动装置,所述驱动装置的固定端与所述滑动架转动连接,其伸缩端通过轴体与所述悬臂的端部转动连接;
7.根据权利要求6所述的立体料库,其特征在于,所述弧形限位槽的两端分别设置有第一限位开关、第二限位开关和第三限位开关,所述第一限位开关用于检测所述悬臂是否处于零位,所述第二限位开关用于检测所述悬臂是否处于储料位,所述悬臂组件上设置有第三限位开关,所述第三限位开关用于检测所述悬臂组件是否上升到位;
8.根据权利要求1所述的立体料库,其特征在于,所述悬臂组件与所述立柱可拆卸连接;
9.根据权利要求1所述的立体料库,其特征在于,所述立体料库还包括起重系统和控制单元,其中:
10.一种基于权利要求1-9任一项所述立体料库的钢轨物料存取控制方法,其特征在于,该方法包括:
技术总结
本发明提供了一种立体料库及钢轨物料存取控制方法,涉及物料存储技术领域,该立体料库包括位于原料存储工位上的原料存储单元,和/或位于成品存储工位上的成品存储单元,原料存储单元和/或成品存储单元上设置有两个以上立体料架,相邻立体料架之间存在有安装间距;立体料架包括立柱、悬臂组件、牵引部和无动力吊放部,悬臂组件沿立柱的高度方向设置有两组以上,每组悬臂组件均与至少一个无动力吊放部相连接;立柱上设置有滑轮组件,牵引部绕于滑轮组件上,且牵引部的两端分别与对应悬臂组件、无动力吊放部相连接。起重系统与立体料库的立体料架协同作业,可实现超重、超长、大变形物料(100米以上)的方便存取。
技术研发人员:薛龙,沈晨,张贝,姜振,韩峰,邹勇,吴成龙,李万祺,张振华
受保护的技术使用者:北京石油化工学院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!