一种重载智能四向穿梭车的制作方法
本申请涉及智能机器人领域,尤其涉及一种重载智能四向穿梭车。
背景技术:
1、穿梭车是一种智能机器人,穿梭车主要应用在智能仓储物流,穿梭车可以在仓储货架上的高精度导轨上面平稳运行,导轨可以同时承担货物输送和货物存储功能,从而极大提高仓储空间利用率,穿梭车配备有智能感应系统,能自动记忆原点位置,自动减速。传统的穿梭车底部会有两组行走方向相互垂直的行走轮,以使得穿梭车在货架轨道上行走,并且目前在穿梭车内设置液压起重板,可以使得穿梭车实现重载运输。
2、而在当需要将货物从一个货架移动至另一个货架上时,由于目前穿梭车仅仅限于在货架轨道上行走,穿梭车无法脱离货架进行运输,因此目前穿梭车的应用范围仍有较大的局限性,智能仓储的运输效率还有待提升。
技术实现思路
1、本申请通过提供一种重载智能四向穿梭车,解决了现有技术中目前穿梭车仅仅限于在货架轨道上行走,穿梭车无法脱离货架进行运输的技术问题,实现了在地面和货架轨道上均可以行走,扩大了穿梭车的应用范围,提高了智能仓储的运输效率。
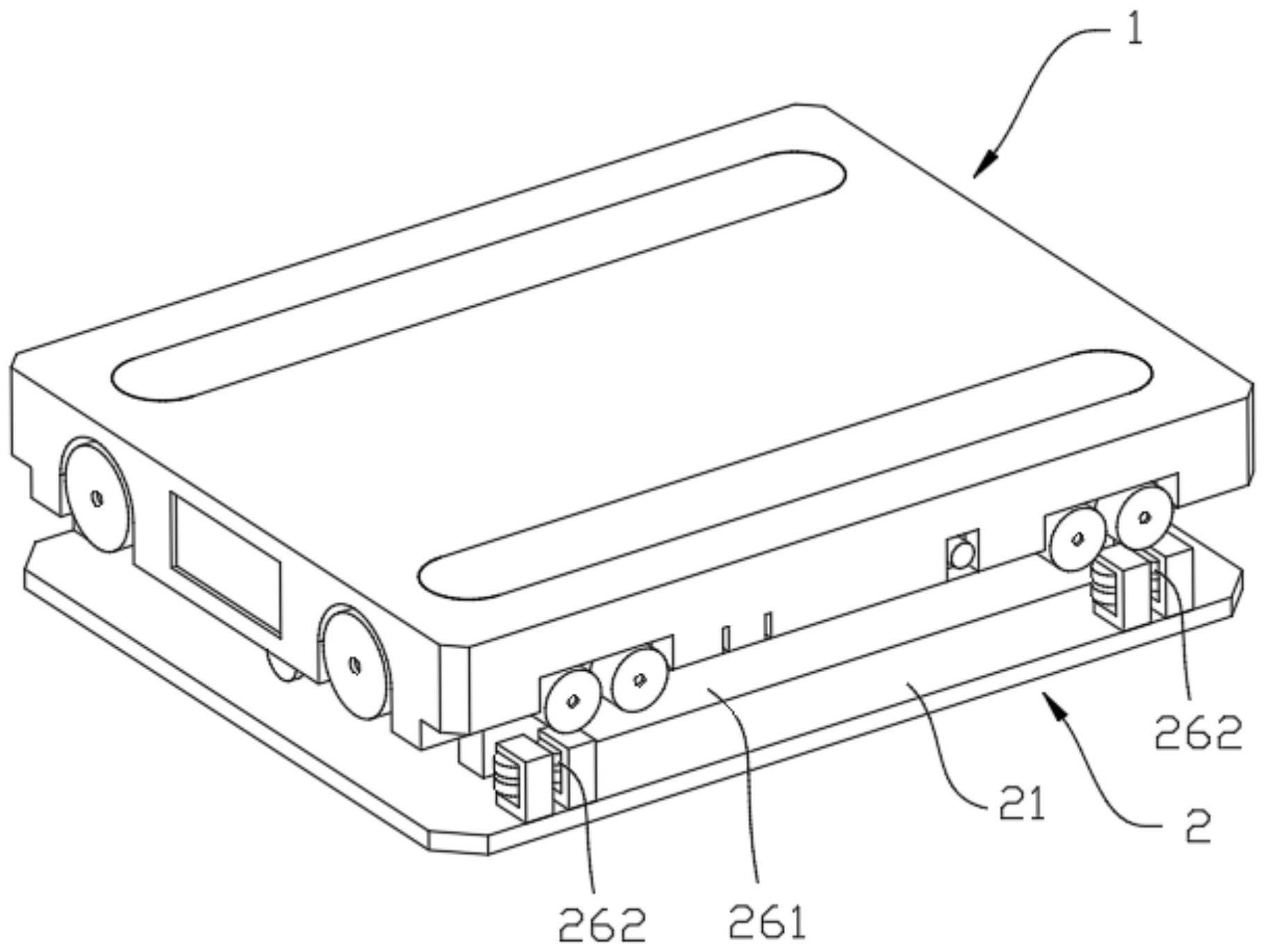
2、本申请提供了一种重载智能四向穿梭车,包括:轨道穿梭车体,用于在货架轨道上行走;地面行走车体,可拆卸连接于所述轨道穿梭车体底面上,用于在地面上行走;其中,所述地面行走车体包括:底座平台板,位于所述轨道穿梭车体的下方;地面行走轮组,安装于所述底座平台板上,用于带动所述地面行走车体行走;地面转向轮组,安装于所述底座平台板上,用于调整所述地面行走车体的行走方向;下锁件,安装于所述底座平台板上;电能接收传导件,安装于所述下锁件上,并与所述地面行走轮组和地面转向轮组电连接;所述轨道穿梭车体底部设置有上锁件,所述上锁件用于与所述下锁件之间互相锁定,所述轨道穿梭车体底部设置有与所述轨道穿梭车体内电池电连接的电能输出传导件,所述上锁件和所述下锁件处于相互锁定状态下的所述电能输出传导件与所述电能接收传导件之间电连接。
3、进一步的,所述下锁件包括:路径框体,固定于所述底座平台板上表面,所述路径框体中两相互平行的侧壁上均开设有内劣弧槽和外劣弧槽,所述内劣弧槽的所属圆和所述外劣弧槽的所属圆同心;移动块,位于所述路径框体内,所述移动块的侧壁安装有若干个滚轮,若干个滚轮分别位于所述内劣弧槽和所述外劣弧槽内;锁锥,设置有多个,并固定于所述移动块上,所述移动块上的滚轮移动至所述内劣弧槽一端时,所述锁锥处于竖直向上状态,所述移动块上的滚轮移动至所述内劣弧槽另一端时,所述锁锥和所述移动块均完全处于所述路径框体内腔中;充电型电动伸缩缸,铰接于所述底座平台板上表面,所述充电型电动伸缩缸的伸缩杆端部铰接于所述移动块上;所述上锁件包括:铰接球座,固定安装于所述轨道穿梭车体底部;锥桶,安装于所述铰接球座上,并用于与所述锁锥相匹配。
4、进一步的,所述电能接收传导件包括:接收固定板,固接于所述移动块靠近所述充电型电动伸缩缸一侧壁上;接收衔接板,固接于所述接收固定板的顶边,所述接收固定板和所述接收固定板之间的夹角线处于所述内劣弧槽所属圆的圆心上,所述接收衔接板上固接有电极片;接收传导电线,与所述接收衔接板上的电极片电性连接,并用于向所述地面行走轮组和所述地面转向轮组中的驱动电机输送电能;所述电能输出传导件包括:输出铰接板,铰接于所述轨道穿梭车体的底部;输出衔接板,固接于所述输出铰接板的底边,所述输出衔接板上固接有电极片,所述锁锥处于与所述锥桶相配合状态下的所述接收衔接板上的电极片与所述输出衔接板上的电极片相接触,所述输出衔接板上的电极片与所述轨道穿梭车体内的电池输出端电性连接;弹簧,固接于所述输出铰接板和所述轨道穿梭车体底部之间,用于使得所述输出衔接板和所述接收衔接板之间紧密贴合。
5、进一步的,所述轨道穿梭车体底部设置有下沉安装槽,所述上锁件和所述电能输出传导件均安装于所述下沉安装槽内,所述弹簧远离所述输出铰接板的一端固接于所述下沉安装槽的侧壁上。
6、进一步的,所述内劣弧槽和所述外劣弧槽中的滚轮转动轴上固接有u型槽件,所述轨道穿梭车体底部铰接有t型杆,述锁锥处于与所述锥桶相配合状态下的所述t型杆插入所述u型槽件内。
7、进一步的,所述底座平台板的两侧均设置有限位组件;其中,所述限位组件包括:内侧限位条,安装于所述底座平台板上,长度方向与所述轨道穿梭车体进入货架轨道入口处的方向一致;外侧限位轮,安装于所述底座平台板上,并位于所述内侧限位条的外侧;货架入口处设置有限位导条,所述限位导条用于插设于所述内侧限位条和所述外侧限位轮之间。
8、进一步的,所述地面转向轮组的两侧对称设置有所述下锁件,且所述地面转向轮组两侧的下锁件共用同一个充电型电动伸缩缸。
9、本申请中提供的一个或多个技术方案,至少具有如下技术效果或优点:
10、由于采用了轨道穿梭车体和地面行走车体的组合,并使用了下锁件和上锁件对轨道穿梭车体和地面行走车体之间进行连接,并通过电能输出传导件和电能接收传导件将电能传输至地面行走轮组和地面转向轮组机中,从而为地面行走轮组和地面转向轮组机中的驱动电机提供电力,实现地面行走车体携带轨道穿梭车体的行走,地面行走轮组带动地面行走车体前行或者后退,地面转向轮组带动地面行走车体转向,从而可以使得地面行走车体的转向更加多角度,更加灵活,以便于携带轨道穿梭车体在地面上灵活行走,实现了重载智能四向穿梭车在地面和货架轨道上均可以行走,扩大了穿梭车的应用范围,提高了智能仓储的运输效率。
技术特征:
1.一种重载智能四向穿梭车,其特征在于,包括:
2.如权利要求1所述的一种重载智能四向穿梭车,其特征在于,
3.如权利要求2所述的一种重载智能四向穿梭车,其特征在于,
4.如权利要求3所述的一种重载智能四向穿梭车,其特征在于,所述轨道穿梭车体(1)底部设置有下沉安装槽(101),所述上锁件(11)和所述电能输出传导件(12)均安装于所述下沉安装槽(101)内,所述弹簧(123)远离所述输出铰接板(121)的一端固接于所述下沉安装槽(101)的侧壁上。
5.如权利要求2所述的一种重载智能四向穿梭车,其特征在于,所述内劣弧槽(2411)和所述外劣弧槽(2412)中的滚轮(2421)转动轴上固接有u型槽件(2422),所述轨道穿梭车体(1)底部铰接有t型杆(102),述锁锥(243)处于与所述锥桶(112)相配合状态下的所述t型杆(102)插入所述u型槽件(2422)内。
6.如权利要求1所述的一种重载智能四向穿梭车,其特征在于,所述底座平台板(21)的两侧均设置有限位组件(26);其中,所述限位组件(26)包括:
7.如权利要求2所述的一种重载智能四向穿梭车,其特征在于,所述地面转向轮组(23)的两侧对称设置有所述下锁件(24),且所述地面转向轮组(23)两侧的下锁件(24)共用同一个充电型电动伸缩缸(244)。
技术总结
本申请涉及智能机器人领域,并公开了一种重载智能四向穿梭车,包括:轨道穿梭车体、地面行走车体;地面行走车体包括:底座平台板;地面行走轮组,用于带动地面行走车体行走;地面转向轮组,用于调整地面行走车体的行走方向;下锁件;电能接收传导件,安装于下锁件上,并与地面行走轮组和地面转向轮组电连接;轨道穿梭车体底部设置有上锁件,上锁件用于与下锁件之间互相锁定,轨道穿梭车体底部设置有与轨道穿梭车体内电池电连接的电能输出传导件,上锁件和下锁件处于相互锁定状态下的电能输出传导件与电能接收传导件之间电连接。本申请实现了在地面和货架轨道上均可以行走,扩大了穿梭车的应用范围,提高了智能仓储的运输效率。
技术研发人员:郭春
受保护的技术使用者:中创科新(北京)科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!