一种小型电池钢壳智能判别及搬运投产的设备的制作方法
本技术涉及搬运投产设备的领域,尤其是涉及一种小型电池钢壳智能判别及搬运投产的设备。
背景技术:
1、搬运投产设备通常是指用来搬移、升降、装卸和短距离输送物料或货物的机械,搬运投产设备是实现搬运投产工作机械化的基础,是运输过程中最重要的设备,搬运投产设备具有适应力强以及工作能力较强等等优点,能够提高装卸效率和缩短作业时间。
2、而对小型电池钢壳进行搬运时,通常将64个装满锂电池钢壳的托盘分成四垛放在栈板上,每垛16层托盘,且托盘的长宽尺寸不同,以及来料时托盘姿态不统一,需要借助搬运投产设备,若通过人力完成,相同一批小型电池钢壳,人力可能需要搬运多次才能够完成,而通过搬运投产设备,不仅能够快速完成任务,还能够降低人力成本,同时能够降低出错的概率。
3、现有的搬运投产设备通常包括移动件和安装在移动件上的夹爪,通过夹爪对托盘进行夹持,再通过移动件带动夹爪至适当位置后,夹爪释放托盘,但由于来料时托盘摆放的姿态并不统一,导致夹爪对托盘夹持的难度较大,影响到夹爪对托盘的定位精度,需要手动调整托盘姿态,使之统一后,再利用夹爪进行搬运投产的工作,降低了工作效率,同时还提高了人力成本。
技术实现思路
1、为了提高夹爪定位精度从而提高搬运投产设备工作效率的问题,本技术提供一种小型电池钢壳智能判别及搬运投产的设备。
2、本技术提供的一种小型电池钢壳智能判别及搬运投产的设备采用如下的技术方案:
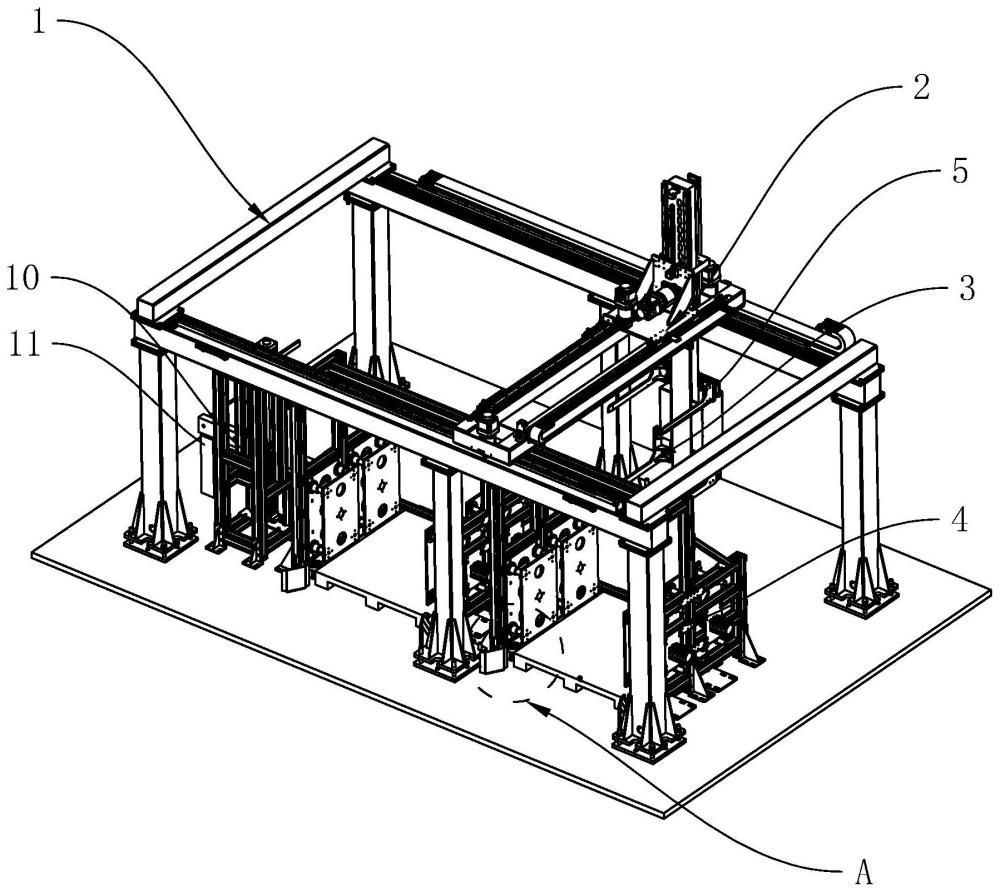
3、一种小型电池钢壳智能判别及搬运投产的设备,包括门架单元,所述门架单元固定设置在工作台上,所述门架单元上设置有移动件,所述移动件上设置有夹爪单元,能够通过所述移动件带动所述夹爪单元夹持托盘并将托盘输送至目标工位,工作台上设置有托盘定位单元,所述托盘定位单元包括定位架和定位板,所述定位架固定在工作台上,所述定位架上设置有若干个定位气缸,所述定位气缸分别设置在所述定位架两侧内壁上,所述定位板固定在所述定位气缸活塞杆上。
4、通过采用上述技术方案,利用移动件和夹爪单元的设置,能够通过移动件带动夹爪单元,利用夹爪单元将托盘夹取并输送至下一工位处;利用定位架和定位板的设置,能够通过将放置托盘的栈板先放置在定位架内,并通过定位板调整托盘的姿态,使之统一,有利于提高夹爪夹取时的定位精度,从而提高搬运投产设备的工作效率。
5、在一个具体的可实施方案中,所述移动件包括第一滑座、第二滑座和第三滑座,所述门架单元上端沿水平长度方向设置有第一滑轨,所述第一滑座上设置有对应所述第一滑轨的第一滑块,所述第一滑座上设置有沿水平长度方向的第二滑轨,所述第二滑座上设置有对应所述第二滑轨的第二滑块,所述第三滑座上沿纵轴长度方向设置有第三滑轨,所述第二滑座上设置有与所述第三滑轨对应的第三滑块。
6、通过采用上述技术方案,利用第一滑座、第二滑座和第三滑座的设置,能够通过滑块与滑轨的配合,使第一滑座、第二滑座和第三滑座相对门架单元移动,从而带动设置在第三滑座上的夹爪单元能够沿门架单元长、宽、高三个方向移动,有利于提高夹爪的夹持范围。
7、在一个具体的可实施方案中,还包括驱动结构,所述驱动结构包括驱动齿条和驱动齿轮,所述驱动齿条设置有若干个,所述驱动齿条分别对应第一滑轨、第二滑轨和第三滑轨设置在所述门架单元、第一滑座和第三滑座上,所述第一滑座和所述第二滑座分别对应第一齿条、第二齿条和第三齿条设置有驱动电机,所述驱动电机输出轴分别与所述驱动齿轮固定连接,所述夹爪单元设置在所述第三滑座上,所述驱动齿轮能够分别与第一齿条、第二齿条和第三齿条配合,从而驱动所述夹爪单元沿所述门架单元的长度、宽度和高度三个方向移动。
8、通过采用上述技术方案,利用驱动齿轮和驱动齿条的设置,能够通过驱动电机带动驱动齿轮,从而通过驱动齿轮与驱动齿条的配合,精准控制第二滑座、第二滑座以及第三滑座的移动距离,有利于提高设置在第三滑块上的夹爪单元的定位精度。
9、在一个具体的可实施方案中,所述第三滑座上设置有多个支撑孔,所述支撑孔并排沿所述第三滑座纵轴长度方向设置在所述第三滑座上,所述第二滑座上设置有支撑电机,所述支撑电机活塞杆能够延伸至所述支撑孔内,且与所述支撑孔配合对所述第三滑座起到支撑作用。
10、通过采用上述技术方案,利用支撑孔和支撑电机的设置,当夹爪单元夹取到托盘时,支撑电机控制活塞杆延伸至支撑孔内,并对第三滑块形成支撑,避免托盘过重,在移动托盘过程中,对第二滑轨和第三滑轨造成过大的负担,从而造成第二滑轨和第三滑轨的损伤。
11、在一个具体的可实施方案中,所述夹爪单元包括夹爪机构、夹爪气缸和夹爪配合气缸,所述夹爪机构包括夹爪和夹爪安装板,所述夹爪气缸和夹爪配合气缸设置在所述夹爪安装板上,所述夹爪气缸和所述夹爪配合气缸输出轴分别与对应的所述夹爪铰接,所述夹爪安装板上设置有安装板滑轨,所述夹爪上设置有夹爪滑块,所述夹爪滑块与所述安装板滑轨配合,限定所述夹爪的移动方向。
12、通过采用上述技术方案,利用夹爪气缸和夹爪配合气缸的设置,能够通过夹爪气缸带动夹爪对托盘进行定位,当确认托盘位置后,通过夹爪配合气缸带动夹爪从而对托盘夹取,有利于提高夹爪单元对托盘夹取定位的准确性。
13、在一个具体的可实施方案中,还包括辅助夹爪单元,所述辅助夹爪单元设置在所述夹爪单元上端的所述移动件部位上,所述夹爪气缸设置有两个,所述夹爪气缸设置在所述夹爪安装板上,所述夹爪气缸与所述夹爪铰接,所述安装板滑轨设置在所述夹爪安装板上,所述夹爪滑块设置在所述夹爪上,所述夹爪滑块与所述安装板滑轨配合,所述夹爪单元和所述辅助夹爪单元的所述安装板上均设置有缓冲气缸,所述缓冲气缸活塞杆与所述夹爪抵接,能够避免所述夹爪释放托盘过快,造成重叠放置的托盘掉落。
14、通过采用上述技术方案,利用辅助夹爪单元的设置,能够避免托盘过高,在对托盘夹持搬运过程中,对上半部分的托盘进行进行,提高托盘的稳定性,避免搬运过程中导致托盘掉落;利用缓冲气缸的设置,能够在气缸控制夹爪释放托盘时,对夹爪的起到一定的缓冲作用,避免托盘释放过快,造成托盘掉落。
15、在一个具体的可实施方案中,所述夹爪单元中上设置有激光传感器和激光测距仪,所述激光传感器用于判断托盘的边长,所述激光传感器与所述夹爪气缸和所述夹爪配合气缸电性连接,能够控制所述夹爪相对运动的距离,所述激光测距仪用于测量所述夹爪到托盘的距离所述激光测距仪与所述移动件电性连接,能够控制所述移动件带动所述夹爪沿所述门架单元宽度方向移动;所述辅助夹爪单元中上设置有对射光纤传感器,所述对射光纤传感器与所述夹爪气缸电性连接,所述对射光纤传感器与所述夹爪辅助单元中的所述夹爪气缸电性连接,所述对射光纤传感器用于判断对托盘是否夹持到位。
16、通过采用上述技术方案,利用激光传感器和激光测距仪的设置,激光传感器和激光测距仪分别能够判断托盘的边长以及测量夹爪到托盘的距离,通过激光传感器与夹爪气缸和夹爪配合气缸电性连接,以及激光测距仪与移动件电性连接,从而精准控制夹爪的行程,对托盘进行定位并夹持,有利于提高工作效率;利用对射光纤传感器的设置,对射光线传感器能够判断夹爪对托盘的夹持是否到位,并通过与夹爪气缸电性连接控制夹爪,从而避免托盘的掉落。
17、在一个具体的可实施方案中,所述托盘定位单元设置有若干个,若干个所述托盘定位单元并排设置,所述定位板上设置有若干个定位滑杆,所述定位架上设置有对应所述滑杆的定位滑套,所述定位滑杆与所述定位滑套滑动连接,所述定位架上设置有对射传感器,所述对射传感器与所述移动件电性连接,用于调整安装在所述移动件上的所述夹爪单元的高度。
18、通过采用上述技术方案,利用若干个托盘定位单元的设置,能够节省单个托盘定位单元需要的等料的时间;利用定位滑杆和定位滑套的设置,能够避免在对托盘定位过程当中,定位板受力不均匀,造成定位板的损伤,能够通过定位滑杆和定位滑套的配合分担一部分力;利用对射传感器的设置,对射传感器能够判断栈盘的高度,从而与移动件电性连接,控制夹爪单元的高度,提高夹爪单元的定位精度。
19、在一个具体的可实施方案中,还包括分层单元,所述分层单元包括分层框架和分层夹爪机构,所述分层框架设置在工作台上,所述分层框架上设置有分层气缸,所述分层气缸活塞杆与所述分层夹爪机构固定,用于驱动所述分层夹爪机构竖直运动,所述分层夹爪机构包括分层夹爪、分层夹爪气缸和分层夹爪安装板,所述分层夹爪安装板与所述分层气缸活塞杆连接,所述分层夹爪气缸设置有两个,所述分层夹爪气缸设置在所述分层夹爪安装板上,所述分层夹爪气缸输出轴与所述分层夹爪铰接。
20、通过采用上述技术方案,利用分层框架和分层夹爪机构的设置,能够将多层重叠的托盘分成几份,避免在对托盘运输到下一工位的工程中造成托盘的掉落,导致托盘内的工件散落。
21、在一个具体的可实施方案中,还包括引导板,所述引导板设置有若干个,所述引导板分别设置在所述定位架的进板口处,所述定位架上相对栈板进入的两侧位置设置有多个引导滑轮,所述引导滑轮与所述定位架转动连接。
22、通过采用上述技术方案,引导板和引导滑轮的设置,引导滑轮有利于快速将装有托盘的栈板安装进托盘定位单元内,同时引导板有利于快速对准托盘定位单元的进板口。
23、综上所述,本技术包括以下至少一种有益技术效果:
24、1.通过移动件和夹爪单元的设置,能够通过移动件带动夹爪单元,利用夹爪单元将托盘夹取并输送至下一工位处;通过定位架和定位板的设置,能够通过将放置托盘的栈板先放置在定位架内,并通过定位板调整托盘的姿态,使之统一,有利于提高夹爪夹取时的定位精度,从而提高搬运投产设备的工作效率;
25、2.通过激光传感器和激光测距仪的设置,激光传感器和激光测距仪分别能够判断托盘的边长以及测量夹爪到托盘的距离,通过激光传感器和激光测距仪与夹爪气缸和夹爪配合气缸电性连接,从而精准控制夹爪的行程,对托盘进行定位并夹持,有利于提高工作效率;通过对射光纤传感器的设置,对射光线传感器能够判断夹爪对托盘的夹持是否到位,并通过与夹爪气缸电性连接控制夹爪,从而避免托盘的掉落;
26、3.通过若干个托盘定位单元的设置,能够节省单个托盘定位单元需要的等料的时间;通过定位滑杆和定位滑套的设置,能够避免在对托盘定位过程当中,定位板受力不均匀,造成定位板的损伤,能够通过定位滑杆和定位滑套的配合分担一部分力;利用对射传感器的设置,对射传感器能够判断栈盘的高度,从而与移动件电性连接,控制夹爪单元的高度,提高夹爪单元的定位精度。
- 还没有人留言评论。精彩留言会获得点赞!