一种门机臂架防撞方法及系统与流程
本发明涉及港口门机自动化作业,尤其涉及一种门机臂架防撞方法及系统。
背景技术:
1、门座式起重机是港口作业重要的设备,其桥架通过两侧的支腿支撑在运行轨道上,多个支腿连接形成其门座,可转动起重部分及操作室均装设在门座上,门座式起重机具有起升、回转、变幅及运行机构,起升、回转及变幅结构均属于可转动起重部分,每一周期内均参与作业,运行机构装设在门座的下部,用于调整起重机的工作位置。
2、公开号为cn206188246u揭示了一种门座机臂架防撞系统,包括驾驶室主机、倾角传感器模块、旋转编码器模块、激光测距模块和无线通信模块;其中,驾驶室主机包括信号分析处理模块、显示模块、操作模块、预警模块和电源模块;倾角传感器模块用于实时检测所述门座机臂架的倾斜的角度并传输至信号分析处理模块;旋转编码器模块用于检测所述门座机的可旋转上部的水平回转角度传输至信号分析处理模块;激光测距模块用于采集门座机和相邻门座机之间的距离并传输至信号分析处理模块。
3、目前门机臂架工作过程中,臂架周围可能还会存在一些障碍物,现有技术中无法检测个门机臂架运动中与周围障碍物发生碰撞,进而降低了安全性,并且,现有技术中通过计算出相邻门座机的臂架间距离,再根据各门座机臂架的水平回转角度,判断两门座机的臂架是否进入碰撞危险区域,该方法计算中存在较大的误差,无法根据本机和它机的运动参数计算运动趋势去预测有无碰撞的风险,精确度较低,导致系统会频繁出现误报率,并且该方法不能预测单个门机臂架与周围障碍物发生碰撞,大大降低了安全性能。
技术实现思路
1、有鉴于此,本发明提出了一种门机臂架防撞方法及系统,不仅可实现周围障碍物的防撞检测还可实现相邻门机座之间的防撞,并根据本机和它机的运动参数计算运动趋势去预测有无碰撞的风险,计算精确度高,降低系统的误报率。
2、本发明的技术方案是这样实现的:本发明提供了一种门机臂架防撞方法,包括以下步骤:
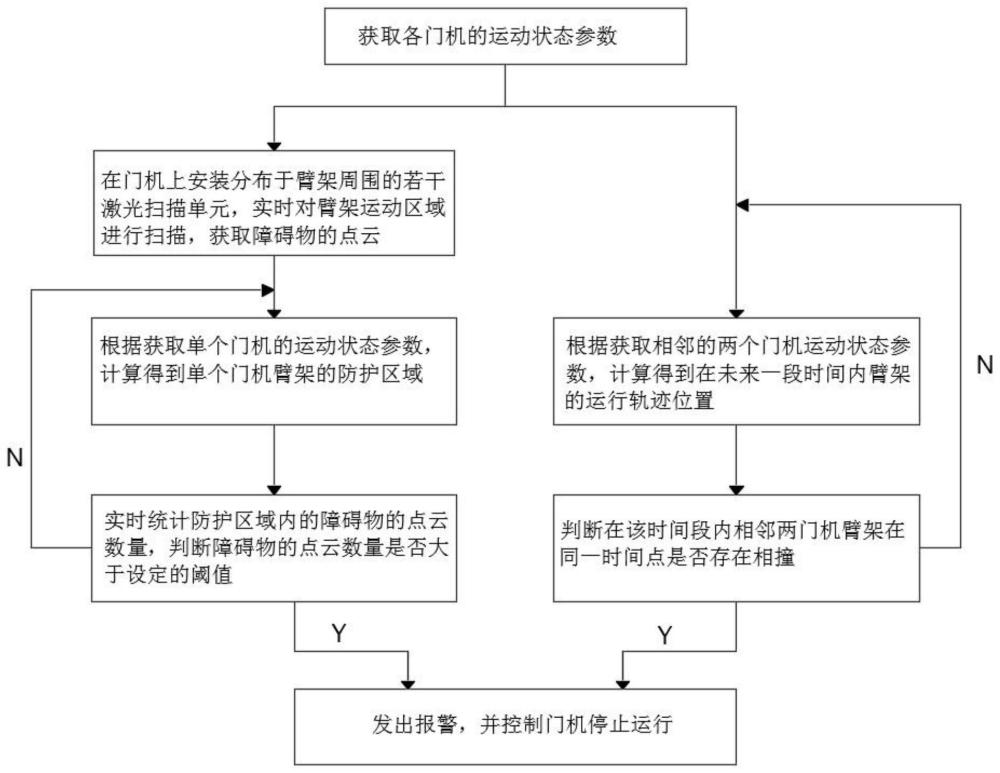
3、s1,获取各门机的运动状态参数;
4、s2,在门机上安装分布于臂架周围的若干激光扫描单元,实时对臂架运动区域进行扫描,获取障碍物的点云;
5、s3,根据获取单个门机的运动状态参数,计算得到单个门机臂架的防护区域;
6、s4,实时统计防护区域内的障碍物的点云数量,判断障碍物的点云数量是否大于设定的阈值,大于发出报警,并控制门机停止运行;
7、s5,根据获取相邻的两个门机运动状态参数,计算得到在未来一段时间内臂架的运行轨迹位置;
8、s6,判断在该时间段内相邻两门机臂架在同一时间点是否存在相撞,存在则发出报警,并控制门机停止运行。
9、在以上技术方案的基础上,优选的,所述步骤s1中获取各门机的运动状态参数,其中,运动状态参数包括臂架最大旋转角速度、臂架最小旋转角速度、臂架旋转角速度、臂架旋转加速度、臂架变幅变化速度、臂架变幅尺寸和臂架变幅加速度。
10、在以上技术方案的基础上,优选的,步骤s2中所述的在门机上安装分布于臂架周围的若干激光扫描单元,其中,若干激光扫描单元分设于门机臂架的朝向方向相垂直的两侧以及臂架靠近地面的一侧,并各激光扫描单元跟随门机臂架同向且同步旋转。
11、在以上技术方案的基础上,优选的,所述两侧的激光扫描单元分别朝向远离门机臂架的一侧倾斜设置,且两侧的激光扫描单元以门机的回转机构中轴线呈对称设置。
12、在以上技术方案的基础上,优选的,步骤s2中所述的实时对臂架运动区域进行扫描,获取障碍物的点云,其中,当门机臂架朝一侧旋转时,其扫描区域为设置在相应侧的激光扫描单元和臂架靠近地面侧的激光扫描单元跟随门机臂架转动的扫描区域。
13、在以上技术方案的基础上,优选的,所述步骤s3中根据获取单个门机的运动状态参数,计算得到单个门机臂架的防护区域,包括以下子步骤:
14、s31,根据臂架的旋转角速度、臂架的最大旋转角速度和臂架的最小旋转角速度,计算得到臂架的防护角度,其中,计算表达式为:
15、
16、式中,pangle为臂架的防护角度,vrt为臂架旋转角速度,vmax为臂架最大旋转角速度,vmin为臂架最小旋转角速度。
17、s32,根据臂架的变幅尺寸得到臂架的防护距离p1,其中,计算表达式为:
18、p1=lrt;
19、式中,p1为臂架的防护距离,lrt为臂架的变幅尺寸;
20、s33,根据防护角度与防护距离得到门机臂架的防护区域。
21、在以上技术方案的基础上,优选的,所述步骤s5中根据获取相邻的两个门机运动状态参数,计算得到在未来一段时间内臂架的运行轨迹位置,包括以下子步骤:
22、s51,在臂架旋转角速度的基础上再设置一个补偿量,根据臂架旋转角速度与设置的补偿量,计算得到补偿后的总臂架旋转角速度,计算表达式为:
23、ωrt=vrt+δω;
24、式中,ωrt为补偿后的总臂架旋转角速度,δω为臂架旋转角速度上设置的补偿量;
25、s52,根据运动学公式,计算得到补偿后门机停止的减速时间tcal,其中,计算表达式为:
26、
27、式中,art为臂架旋转加速度;
28、s53,根据臂架旋转角速度上设置的补偿量与门机旋转加速度以及补偿后门机停止的减速时间,计算得到最终的整个减速时间t,其中,计算表达式为:
29、
30、s54,将减速时间t按照固定或非固定步长t_step离散成一系列的时间点t0、t1、t2…tn等,计算每个时间点的各门机的臂架旋转角度和变幅尺寸,得到臂架的位置,从而获得整个减速时间t内本门机臂架与相邻的门机臂架的运行轨迹。
31、在以上技术方案的基础上,优选的,所述步骤s6中判断在该时间段内相邻两门机臂架在同一时间点是否相撞,存在则发出报警,并控制门机停止运行,其中,还包括判断该时间段内本机臂架和它机臂架之间或本机臂架和它机旋转中心之间或本机旋转中心和它机旋转中心之间是否会出现相撞,存在则发出报警,并控制门机停止运行。
32、本发明还提供了一种门机臂架防撞系统,其特征在于:包括若干激光扫描单元、数据采集单元、第一数据处理单元、第一判断输出单元、第二数据处理单元和第二判断输出单元,其中,
33、数据采集单元用于获取各门机的运动状态参数;
34、若干激光扫描单元均设置在门机上,且分布于臂架周围,用于实时对臂架运动区域进行扫描,获取障碍物的点云;
35、第一数据处理单元用于根据获取单个门机的运动状态参数,计算得到单个门机臂架的防护区域;
36、第一判断输出单元用于实时统计防护区域内的障碍物的点云数量,判断障碍物的点云数量是否大于设定的阈值,大于发出报警,并控制门机停止运行;
37、第二数据处理单元用于根据获取相邻的两个门机运动状态参数,预测在未来一段时间内臂架的运行轨迹位置;
38、第二判断输出单元用于判断在该时间段内相邻两门机臂架在同一时间点是否存在相撞,存在则发出报警,并控制门机停止运行。
39、本发明还提供了一种计算机可读存储介质,所述存储介质上存储有一种门机臂架防撞方法程序,所述一种门机臂架防撞方法程序被执行时实现上述的一种门机臂架防撞方法。
40、本发明的一种门机臂架防撞方法及系统相对于现有技术具有以下有益效果:
41、(1)通过设置的激光扫描单元对臂架附近的障碍物进行实时扫描,判断防护区域内的点云数量是否超出阈值,超过则发送报警控制门机停止运行,从而防止本门机臂架与周围障碍物发生碰撞;另外,并通过本门机和它机的运行参数信息实时计算臂架的运行轨迹,判断两门机之间是否存在运动干涉,从而防止两门机之间发生碰撞,提高门机作业过程中的安全性;
42、(2)通过获取相邻的两个门机的运动参数,并考虑到设备响应及传输的延迟时间问题,在此基础计算整机的减速时间,再根据减速时间计算本机与它机运动趋势预测有无碰撞的风险,计算精确度高,降低系统的误报率。
- 还没有人留言评论。精彩留言会获得点赞!