基于GPS的斗轮位置获取方法、电子设备和存储介质与流程
本发明涉及设备控制领域,特别是涉及一种基于gps的斗轮位置获取方法、电子设备和存储介质。
背景技术:
1、当前,堆取料机(简称大机)被广泛应用在各类大型矿石堆场的堆料和取料作业中。大机在接收到作业指令后,移动到指定的堆垛,通过悬臂皮带机、地面皮带机及悬臂前端斗轮协同配合完成对应的作业操作。为实现大机的准确作业操作,一般会通过监控系统对大机的位置姿态进行实时监控。目前常用的监控方案为,通过臂架的机械图纸,以及安装在走行机构处的编码器获取堆取料机走行位置,安装在臂架回转机构处的角度编码器获取回转角度,安装在臂架俯仰机构处的角度编码器获取俯仰角度,接着通过简单的三角函数,得到理论上的斗轮中心位置。但是,由于臂架会因为自重和输送物料的重量等会发生形变,现有方案并未考虑臂架形变、角度编码器等偏差,因而会导致获取的斗轮中心位置不够准确,进而影响无人化堆取料作业时的作业控制准确度。
技术实现思路
1、针对上述技术问题,本发明采用的技术方案为:
2、本发明实施例提供一种基于gps的斗轮位置获取方法,用于获取堆取料机的斗轮位置,所述方法包括以下步骤:
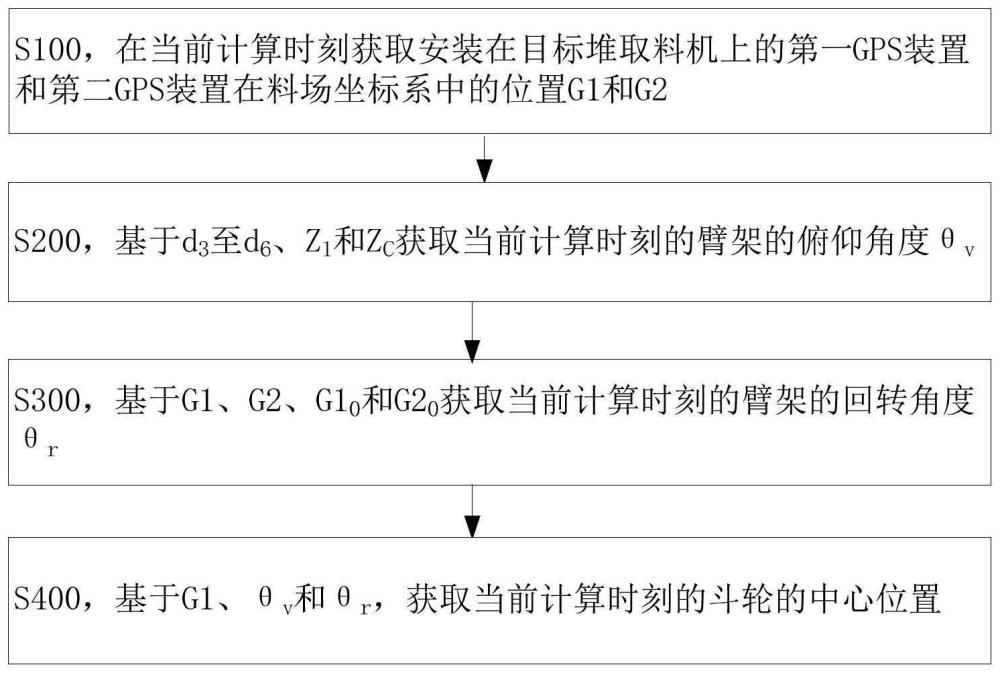
3、s100,在当前计算时刻获取安装在堆取料机上的第一gps装置和第二gps装置在料场坐标系中的位置g1=(x1,y1,z1)和g2=(x2,y2,z2);x1,y1,z1分别为当前计算时刻第一gps装置在料场坐标系中的x轴、y轴和z轴上的坐标值;x2,y2,z2分别为当前计算时刻第二gps装置在料场坐标系中的x轴、y轴和z轴上的坐标值;其中,第一gps装置设置在堆取料机的臂架的前端,第二gps装置设置在所述臂架的上方的位置处;其中,x轴位于堆取料机的长度方向,y轴位于堆取料机的宽度方向,z轴位于堆取料机的高度方向。
4、s200,基于d3至d6、z1和zc获取当前计算时刻的臂架的俯仰角度θv;其中,d3为第一gps装置沿臂架中心线方向与臂架俯仰中心之间的距离,d4为第二gps装置沿臂架中心线方向与臂架俯仰中心之间的距离;d5为第一gps装置与臂架俯仰中心之间的垂直距离,d6为第二gps装置与臂架俯仰中心之间的垂直距离;zc为臂架俯仰中心在料场坐标系的z轴上的坐标值。
5、s300,基于g1、g2、g10和g20获取当前计算时刻的臂架的回转角度θr;其中,g10和g20分别为在臂架处于零位状态时,第一gps装置和第二gps装置在料场坐标系中的位置;g10=(x01,y01,z01),g20=(x02,y02,z02),x01,y01,z01分别为在臂架处于零位状态时,第一gps装置在料场坐标系中的x轴、y轴和z轴上的坐标值,x02,y02,z02分别为在臂架处于零位状态时,第二gps装置在料场坐标系中的x轴、y轴和z轴上的坐标值;所述零位状态为所述臂架的回转角度为0°以及俯仰角度为0°的状态。s400,基于g1、θv和θr,获取当前计算时刻的斗轮的中心位置(x,y,z);x,y,z分别为当前计算时刻斗轮的中心在料场坐标系中的x轴、y轴和z轴上的坐标值。
6、本发明实施例还提供一种非瞬时性计算机可读存储介质,所述存储介质中存储有至少一条指令或至少一段程序,所述至少一条指令或所述至少一段程序由处理器加载并执行以实现前述方法。
7、本发明实施例还提供一种电子设备,包括处理器和前述的非瞬时性计算机可读存储介质。
8、本发明至少具有以下有益效果:
9、本发明实施例提供的基于gps的斗轮位置获取方法,首先通过两个gps装置的实时位置来确定堆取料机的俯仰角度,接着基于俯仰角度获取堆取料机的回转角度,最后基于靠近斗轮的gps装置的位置、确定的俯仰角度和回转角度来确定斗轮位置,能够通过两个gps装置的实时位置来间接确定斗轮位置,从而能够准确的获取斗轮位置。
技术特征:
1.一种基于gps的斗轮位置获取方法,用于获取堆取料机的斗轮位置,其特征在于,所述方法包括以下步骤:
2.根据权利要求1所述的方法,其特征在于,θv=arcsin((z1-zc)/(d32+d52)1/2)-arcsin(d5/(d32+d52)1/2)。
3.根据权利要求1所述的方法,其特征在于,s300具体包括:
4.根据权利要求1所述的方法,其特征在于,其中,x=x1+d1×sinθr+d2×cosθv×cosθr+d3×sinθv×cosθr;y=y1+d1×cosθr+d2×cosθv×sinθr+d3×sinθv×sinθr;z=z1+d1×sinθv-d3×cosθv;其中,d1为斗轮中心与第一gps装置之间垂直于臂架中心线方向的距离差,d2为斗轮中心与第一gps装置之间沿臂架中心线方向的距离,d3为斗轮中心与第一gps装置之间的高度差。
5.根据权利要求1所述的方法,其特征在于,zc通过如下步骤获取得到:
6.根据权利要求3所述的方法,其特征在于,l1=d3-(d23+d25-(z1-z10)2)1/2;l2=d4-(d24+d26-(z2-z20)2)1/2;z10和z20分别为在臂架处于零位状态时,第一gps装置和第二gps装置在料场坐标系中的z轴上的坐标值。
7.根据权利要求4所述的方法,其特征在于,d1=d0-d1;d2=l0-d3;d3=h0-d5;其中,d0为臂架俯仰中心和斗轮中心之间垂直臂架中心线方向的偏差,l0为臂架俯仰中心和斗轮中心之间沿臂架中心线方向的距离,h0为臂架俯仰中心和斗轮中心之间的高度差;d1为第一gps装置与臂架中心线之间的距离。
8.一种非瞬时性计算机可读存储介质,所述存储介质中存储有至少一条指令或至少一段程序,其特征在于,所述至少一条指令或所述至少一段程序由处理器加载并执行以实现如权利要求1-7中任意一项的所述方法。
9.一种电子设备,其特征在于,包括处理器和权利要求8中所述的非瞬时性计算机可读存储介质。
技术总结
本发明提供了一种基于GPS的斗轮位置获取方法、电子设备和存储介质,涉及设备控制领域,包括:在当前计算时刻获取安装在堆取料机上的第一GPS装置和第二GPS装置在料场坐标系中的位置;基于d<subgt;3</subgt;至d<subgt;6</subgt;、Z<subgt;1</subgt;和Z<subgt;C</subgt;获取当前计算时刻的臂架的俯仰角度θ<subgt;v</subgt;;基于G1、G2、G1<subgt;0</subgt;和G2<subgt;0</subgt;获取当前计算时刻的臂架的回转角度θ<subgt;r</subgt;;基于G1、θ<subgt;v</subgt;和θ<subgt;r</subgt;,获取当前计算时刻的斗轮的中心位置。本发明能够准确获取斗轮中心位置。
技术研发人员:黄帅,周泉,刘也,赵德安,邹少波,刘蕊,包志伟
受保护的技术使用者:长沙盈海智能科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!