一种柔性堆垛机及控制方法与流程
本发明涉及堆垛机,尤其涉及一种柔性堆垛机及控制方法。
背景技术:
1、堆垛机即堆垛起重机,是一种在仓库、车间等处攫取、搬运和堆垛或从高层货架盘上取放单元货物的专用起重机。目前堆垛机可以按照有无轨道的方式分为有轨堆垛起重机以及无轨堆垛起重机;按照驱动方式分为上部驱动堆垛起重机、下部驱动堆垛起重机以及上下部结合驱动堆垛起重机。其中采用有轨堆垛起重机可以利用滑触线进行充电,以降低能耗。
2、在实际使用的过程中,例如仓库,并不是所有货架盘间的区域都适用于进行轨道的铺设,因而可以采用选择性铺设,并利用充电过程所获取的电能进行驱动。针对轨道的选择性铺设,需要一种针对轨道/非轨道区域的移动的驱动结构以及相应的控制方法,以保证柔性堆垛机的正常工作。
技术实现思路
1、本发明提供一种柔性堆垛机,目的在于保证在轨道/非轨道区域的正常工作。
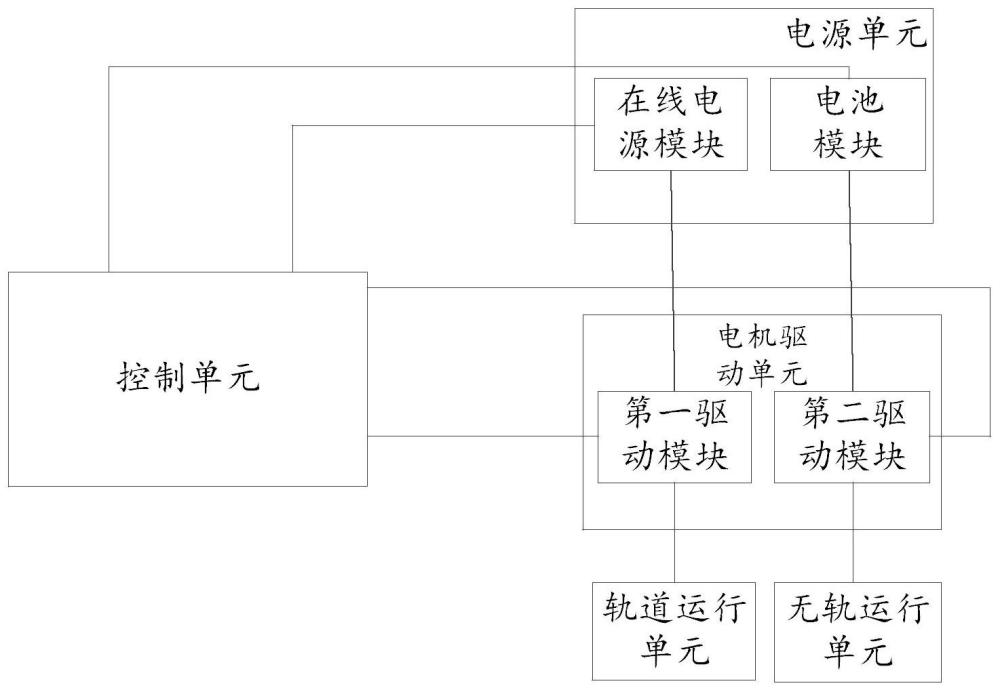
2、第一方面,本发明实施例提供了一种柔性堆垛机,包括:
3、控制单元;
4、电源单元,与控制单元电性连接,包括在线电源模块以及电池模块,其中在线电源模块用以在有轨模式下进行供电,电池模块用以在无轨模式下进行供电;
5、电机驱动单元,与控制单元电性连接,包括第一驱动模块以及第二驱动模块,其中第一驱动模块与在线电源模块电性连接,并接收控制单元的有轨模式指令,第二驱动模块与电池模块电性连接,并接收控制单元的无轨模式指令;
6、轨道运行单元,与第一驱动模块电性连接,并根据有轨模式指令行进;
7、无轨运行单元,与第二驱动模块电性连接,并根据无轨模式指令行进。
8、可选地,电池模块包括有集电极正极与集电极负极,集电极正极与设置于轨道的滑触线正极接触,集电极负极与滑触线负极接触,实现在有轨模式下对电池模块进行充电。
9、可选地,电机驱动单元还包括分别与在线电源模块以及电池模块电性连接的第三驱动模块,用以驱动柔性堆垛机的货架盘沿竖直方向行进。
10、可选地,轨道运行单元包括第一移动轮组,第一移动轮组包括设置于柔性堆垛机底座两端的转轮,第一驱动模块至少与柔性堆垛机本体两端的一个转轮电性连接。
11、可选地,轨道运行单元还包括定位件,固定于柔性堆垛机底座侧部的两端,用以纠正柔性堆垛机与轨道的相对位置。
12、可选地,无轨运行单元包括至少两对第二移动轮组,分别固定于柔性堆垛机底座侧部,第二移动轮组包括移动轮以及伸缩臂,其中伸缩臂的一端与柔性堆垛机底座固定连接,伸缩臂的另一端与移动轮固定连接。
13、第二方面,本发明提供了一种柔性堆垛机的控制方法,应用第一方面提供的柔性堆垛机的控制单元,包括:
14、获取待移动货物的位置信息并规划移动路径;
15、实时监测移动路径,判定是否切换行进模式;
16、若是,驱动电源单元调整对电机驱动单元的供电,调整电机驱动单元的工作模式。
17、可选地,实时监测移动路径,判定是否切换行进模式,具体包括:
18、若检测柔性堆垛机驶入轨道区域,由无轨模式切换至有轨模式;
19、若检测柔性堆垛机驶出轨道区域,由无轨模式切换至有轨模式。
20、可选地,有轨模式下,控制单元控制第一驱动模块,以驱动第一移动轮组转动;
21、无轨模式下,控制单元控制第二驱动模块,以驱动第二移动轮组转动。
22、可选地,在有轨模式下,电源单元中的电池模块利用滑触线进行充电。
23、本发明实施例提供的一种柔性堆垛机及控制方法,其中该柔性堆垛机通过控制单元根据柔性堆垛机的行进路径是否属于轨道区域而选择不同的供电方式,并且针对行进路径是否属于轨道区域而选择轨道运行单元或者无轨运行单元,并将对应的供电方式与轨道运行单元或者无轨运行单元进行独立匹配,从而保证了柔性堆垛机在轨道/非轨道区域的正常工作。
技术特征:
1.一种柔性堆垛机,其特征在于,包括:
2.根据权利要求1所述的柔性堆垛机,其特征在于,所述电池模块包括有集电极正极与集电极负极,集电极正极与设置于轨道的滑触线正极接触,集电极负极与滑触线负极接触,实现在所述有轨模式下对所述电池模块进行充电。
3.根据权利要求1所述的柔性堆垛机,其特征在于,所述电机驱动单元还包括分别与所述在线电源模块以及所述电池模块电性连接的第三驱动模块,用以驱动所述柔性堆垛机的货架盘沿竖直方向行进。
4.根据权利要求1所述的柔性堆垛机,其特征在于,所述轨道运行单元包括第一移动轮组,所述第一移动轮组包括设置于所述柔性堆垛机底座两端的转轮,所述第一驱动模块至少与所述柔性堆垛机本体两端的一个所述转轮电性连接。
5.根据权利要求1或4所述的柔性堆垛机,其特征在于,所述轨道运行单元还包括定位件,固定于所述柔性堆垛机底座侧部的两端,用以纠正所述柔性堆垛机与轨道的相对位置。
6.根据权利要求1所述的柔性堆垛机,其特征在于,无轨运行单元包括至少两对第二移动轮组,分别固定于所述柔性堆垛机底座侧部,所述第二移动轮组包括移动轮以及伸缩臂,其中所述伸缩臂的一端与所述柔性堆垛机底座固定连接,所述伸缩臂的另一端与所述移动轮固定连接。
7.一种柔性堆垛机的控制方法,应用于权利要求1-6任一所述的柔性堆垛机的控制单元,其特征在于,包括:
8.根据权利要求7所述的柔性堆垛机的控制方法,其特征在于,所述实时监测所述移动路径,判定是否切换行进模式,具体包括:
9.根据权利要求8所述的柔性堆垛机的控制方法,其特征在于,所述有轨模式下,所述控制单元控制第一驱动模块,以驱动第一移动轮组转动;
10.根据权利要求8或9所述的柔性堆垛机的控制方法,其特征在于,在所述有轨模式下,所述电源单元中的电池模块利用滑触线进行充电。
技术总结
本申请提供一种柔性堆垛机及控制方法,柔性堆垛机包括:控制单元;电源单元,包括在线电源模块及电池模块,与控制单元电连接,在有轨/无轨模式下进行供电;电机驱动单元,与控制单元电连接,包括第一驱动模块及第二驱动模块,第一驱动模块与在线电源模块电连接,第二驱动模块与电池模块电连接,分别在有轨/无轨模式下驱动堆垛机行进;轨道运行单元,与第一驱动模块电连接;无轨运行单元,与第二驱动模块电连接。本申请提供的技术方案,通过控制单元根据路径选择供电方式,针对行进路径选择轨道运行单元或者无轨运行单元,将对应的供电方式与轨道运行单元或者无轨运行单元进行独立匹配,保证了柔性堆垛机在轨道/非轨道区域的正常工作。
技术研发人员:韩福进,马欣严,杨宗超,任宇飞
受保护的技术使用者:北京中都星徽物流有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!