一种自动识别卸车方法与流程
本发明涉及物流,尤其涉及一种自动识别卸车方法。
背景技术:
1、目前,在物流技术方面,装卸货是一个较为关键的方向,在中国专利公开号:cn219839217u中公开有一种新型卸车机器人,包括行走车体及设于行走车体上的两个立柱、可上下升降地设于各立柱上的升降座、驱动各升降座的升降驱动装置、设于各升降座上的机械抓手,两个立柱间隔设置,两立柱之间设置有一输送机构,所述输送机构铰接于两立柱或行走车体上,并形成铰接点,所述行走车体或立柱上设置有驱动输送机构绕铰接点转动的转动驱动装置。该卸货机器人输送机构的输入端能上下摆动以配合机械抓手的升降高度,拿取不同高度的烟包,卸货效率高且运行平稳,降低对人工的需求,安全性更高,且能够有效避免烟包磕碰损坏。
2、而针对这一技术,由于烟包的长度、宽度、高度以及体积不同,烟包不同的卸货堆垛方式所占用空间不同,也会影响卸货的效率,本申请人在继续研究中,对于烟包如何进行识别也进行了研究,并申请了本方案。
技术实现思路
1、因此,针对上述的问题,本发明提出一种自动识别卸车方法,在对烟包自动卸货时,通过对不同烟包进行相应识别,进而对卸货顺序进行分配,以提高卸货效率。
2、为实现上述目的,本发明采用了以下技术方案:一种自动识别卸车方法,包括以下步骤:
3、第一步,利用卸车装置对车厢内的烟包进行扫描,实现烟包的排列识别、宽度识别、高度识别、长度识别,并对所识别的烟包进行相应的烟包标识;
4、第二步,以设定的笼车空间为基准,给每一行所识别的烟包设定抓取顺序并进行相应的抓取标识;
5、第三步,按抓取标识进行抓取;
6、所述卸车装置上设置有两个机械手臂,进行抓取标识时按两个机械手臂交替抓取的方式进行标识;
7、烟包标识包括普通标识与特殊标识,上一行的普通标识的烟包的抓取优先度大于下一行普通标识的烟包,特殊标识的烟包的抓取优先度大于上一行的不位于其正上方的普通标识的烟包。
8、优选的,进行抓取标识前,对烟包进行码垛顺序模拟,获得最佳码垛顺序,按最佳码垛顺序进行抓取,进行抓取之后,按抓取顺序对各烟包的码垛状态进行模拟,并依次更新,并测定剩余码垛空间,形成数据集合q,数据集合q={宽度w,长度l,高度h,体积v},在抓取烟包之后,对各烟包的尺寸进行核对,当烟包尺寸小于误差值,则进行下一各烟包的码垛状态模拟,当烟包尺寸大于误差值,则对数据集合q进行修订形成新的数据集合q1。
9、优选的,判断数据集合q1是否满足原有码垛顺序,若不满足,以数据集合q1为基础,重新进行抓取标识。
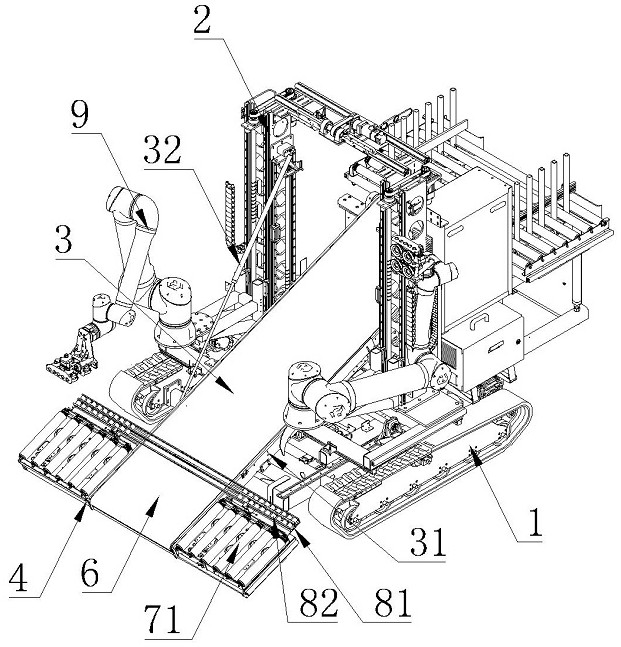
10、优选的,所述卸车装置包括行走车体及设于行走车体上的安装座,所述安装座上可转动地设置有输送机构,所述输送机构包括输送支架,所述输送支架的输入端上可转动地设置有导向支架,所述导向支架或输送支架上设置有驱动导向支架进行转动的转动驱动装置,所述导向支架上位于输送机构的输入端处设置有输入输送带,当输送机构的输入端上下升降时,所述输入输送带在转动驱动装置的驱动下保持水平。
11、优选的,所述导向支架上位于输入输送带的两侧上设置有导向辊机构,所述导向辊机构用于将烟包向输入输送带方向输送。
12、优选的,所述输送支架的两侧上靠近导向支架处设置有实现对导向辊机构进行阻挡的挡料机构,所述挡料机构包括挡料支架及设于挡料支架上的多个挡料辊轮。
13、优选的,所述导向辊机构包括可转动地设于导向支架上的多个导向辊体和驱动导向辊体进行转动的伺服电机。
14、优选的,各导向辊体的上端面形成第一输送平面,所述输入输送带的上端面形成第二输送平面,所述第一输送平面不低于第二输送平面。
15、通过采用前述技术方案,本发明的有益效果是:
16、1、本方案中,在卸车之前,先对车厢内堆叠的烟包进行扫描并识别,而后赋予每一个烟包相应的烟包标识,然后设定相应的抓取标识,按抓取标识进行抓取。这样的设定,可以实现对外层的烟包的一次性标记,有利于提高抓取的效率,而且,烟包标识包括普通标识与特殊标识,这样标识之后,可以实现较好的输出顺序的调整,实现后段堆叠的有效排序。另外,进行了码垛顺序的模拟,该模拟是基于笼车或码垛盘或码垛工位的空间限制而进行的,也即给定了一个具有长宽高的空间大小,而设定了数据集合q则可以有效对码垛结果进行预判性的反馈,防止输出后造成码垛不准确,或者码垛错误,而导致当前或后续的码垛的失败。进一步的,判断数据集合q1是否满足原有码垛顺序,若不满足,以数据集合q1为基础,重新进行抓取标识。也即,可以实时进行码垛顺序的矫正,实现较好的无人化作业。
17、2、针对卸车装置也进行了相应的调整,为了能够更好地实现对烟包的承接,设置了导向支架及输入输送带,输送支架在抬升过程中,导向支架的状态要随之变动,实现导向支架上的输入输送带始终保持水平。而不是之前的倾斜输送,这种倾斜输送虽然也可以,但是存在着许多缺陷,例如容易打滑,输送带的速度不能太快等等。从而,可以实现卸车效率的有效提高。
18、3、导向辊机构的设置,既可以实现有效的阻挡烟包的掉落,也可以有效实现缓存,并且通过导向辊机构的设置,可以实现烟包在缓存后可以自动转移至输入输送带上,从而实现有效缓存与转移的目的。而且导向辊机构也如同输入输送带一样是在输送机构上下抬升的过程中保持水平的,从而配合输入输送带实现卸车效率的有效提高。
19、4、挡料机构的设置,可以有效实现对烟包输送的防护,防止烟包从导向辊机构转移至输入输送带时发生倾斜掉落,而且加装了挡料辊轮,可以有效实现导向的顺畅性。
20、5、各导向辊体的上端面形成第一输送平面,所述输入输送带的上端面形成第二输送平面,所述第一输送平面不低于第二输送平面。实际设置时,让导向辊机构略高于输入输送带可以更好地实现转移,而且导向辊机构可以设置成倾斜的,如远离输入输送带的一端的高度较高,这种可以使得烟包更好地进入输入输送带,甚至可以省略对于导向辊机构的主动驱动,利用物品的倾斜下滑即可。
技术特征:
1.一种自动识别卸车方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种自动识别卸车方法,其特征在于:进行抓取标识前,对烟包进行码垛顺序模拟,获得最佳码垛顺序,按最佳码垛顺序进行抓取,进行抓取之后,按抓取顺序对各烟包的码垛状态进行模拟,并依次更新,并测定剩余码垛空间,形成数据集合q,数据集合q={宽度w,长度l,高度h,体积v},在抓取烟包之后,对各烟包的尺寸进行核对,当烟包尺寸小于误差值,则进行下一各烟包的码垛状态模拟,当烟包尺寸大于误差值,则对数据集合q进行修订形成新的数据集合q1。
3.根据权利要求2所述的一种自动识别卸车方法,其特征在于:判断数据集合q1是否满足原有码垛顺序,若不满足,以数据集合q1为基础,重新进行抓取标识。
4.根据权利要求1所述的一种自动识别卸车方法,其特征在于:所述卸车装置包括行走车体及设于行走车体上的安装座,所述安装座上可转动地设置有输送机构,所述输送机构包括输送支架,所述输送支架的输入端上可转动地设置有导向支架,所述导向支架或输送支架上设置有驱动导向支架进行转动的转动驱动装置,所述导向支架上位于输送机构的输入端处设置有输入输送带,当输送机构的输入端上下升降时,所述输入输送带在转动驱动装置的驱动下保持水平。
5.根据权利要求4所述的一种自动识别卸车方法,其特征在于:所述导向支架上位于输入输送带的两侧上设置有导向辊机构,所述导向辊机构用于将烟包向输入输送带方向输送。
6.根据权利要求5所述的一种自动识别卸车方法,其特征在于:所述输送支架的两侧上靠近导向支架处设置有实现对导向辊机构进行阻挡的挡料机构,所述挡料机构包括挡料支架及设于挡料支架上的多个挡料辊轮。
7.根据权利要求5所述的一种自动识别卸车方法,其特征在于:所述导向辊机构包括可转动地设于导向支架上的多个导向辊体和驱动导向辊体进行转动的伺服电机。
8.根据权利要求7所述的一种自动识别卸车方法,其特征在于:各导向辊体的上端面形成第一输送平面,所述输入输送带的上端面形成第二输送平面,所述第一输送平面不低于第二输送平面。
技术总结
本发明涉及物流技术领域,尤其涉及一种自动识别卸车方法,包括以下步骤:第一步,利用卸车装置对车厢内的烟包进行扫描,实现烟包的排列识别、宽度识别、高度识别、长度识别,并对所识别的烟包进行相应的烟包标识;第二步,以设定的笼车空间为基准,给每一行所识别的烟包设定抓取顺序并进行相应的抓取标识;第三步,按抓取标识进行抓取。本方法对烟包自动卸货时,通过对不同烟包进行相应识别,进而对卸货顺序进行分配,以提高卸货效率。
技术研发人员:曾国耀
受保护的技术使用者:福建科盛智能物流装备有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!