一种地埋式垃圾桶抓取装置及抓取方法与流程
本发明涉及一种地埋式垃圾桶抓取装置及抓取方法,属于环卫设备。
背景技术:
1、现今市场上的地埋式垃圾桶主要为滚塑成型的圆形垃圾桶,起吊方式主要依靠传统的四腿链条悬挂在随车起重机的吊钩上将地埋式垃圾桶从基础中吊出,该种方式需要手动将链条悬挂至起重机吊钩上并经链条与地埋式垃圾桶连接,垃圾桶中臭味严重,作业环境恶劣;底盖开启方式主要为手动拉动绳索开启,作业时需先将地埋桶从基础中吊起,再将绳索固定在底盖空间连杆机构上,待垃圾桶吊至收集车上方后再手动拉动绳索,开启底盖;投完垃圾之后将地埋式垃圾桶放回地面,靠自重将底盖空间连杆机构重新闭合,然后解下绳索,再将地埋式垃圾桶放回基础。整个作业流程环节多、作业环境恶劣、劳动强度高,亟需进行改善。
2、中国发明专利申请(申请号201510982369.1)公开了一种地埋式垃圾桶及底盖开启机构,地埋式垃圾桶由桶体及桶底组成,桶体与桶底通过一组铰链连接在一起,另外一侧设置空间连杆机构,空间连杆机构与解锁机构相连;起重机将垃圾桶起吊至收集车上方时,通过预先固定在解锁机构上的绳索拉动解锁机构,将地埋式垃圾桶底盖打开,桶底在自重作用下绕铰链旋转,从而将垃圾桶中的垃圾投入箱体。此种方式为现市场上最为常见的地埋式垃圾桶底盖开启方式,作业环境恶劣,解锁机构还可能出现无法拉动现象,拉拽开启垃圾桶底盖时会造成垃圾桶剧烈晃动,造成垃圾及污水洒落,对环境造成二次污染。
技术实现思路
1、本发明的目的在于克服目前地埋式垃圾桶在吊装卸料过程中,操作流程复杂,需要手动悬挂链条吊装,作业环境恶劣;需要手动拉动绳索开启或关闭底盖,易引起垃圾桶发生晃动而造成二次污染的问题。为此,提供一种地埋式垃圾桶抓取装置及抓取方法,简化作业流程,解决地埋式垃圾桶吊装作业过程中挂钩复杂、底盖开启困难、垃圾桶晃动造成污水及垃圾泄漏等问题,实现地埋式垃圾桶吊装作业自动抓取与底盖自开启,改善吊装作业环境。
2、本发明的目的是这样实现的:
3、一种地埋式垃圾桶抓取装置,包含安装在吊装式垃圾车的随车吊机上的抓取机构,所述抓取机构用于抓取和启闭地埋式垃圾桶,所述抓取机构包含抓取机构壳体、安装在抓取机构壳体上的锁紧机构、通过升降机构升降设置在抓取机构壳体上的抓手;所述抓手上设有上抱爪机构;所述抓取机构壳体底部设有下抱爪机构;所述锁紧机构控制上抱爪机构和下抱爪机构的闭合或开启。
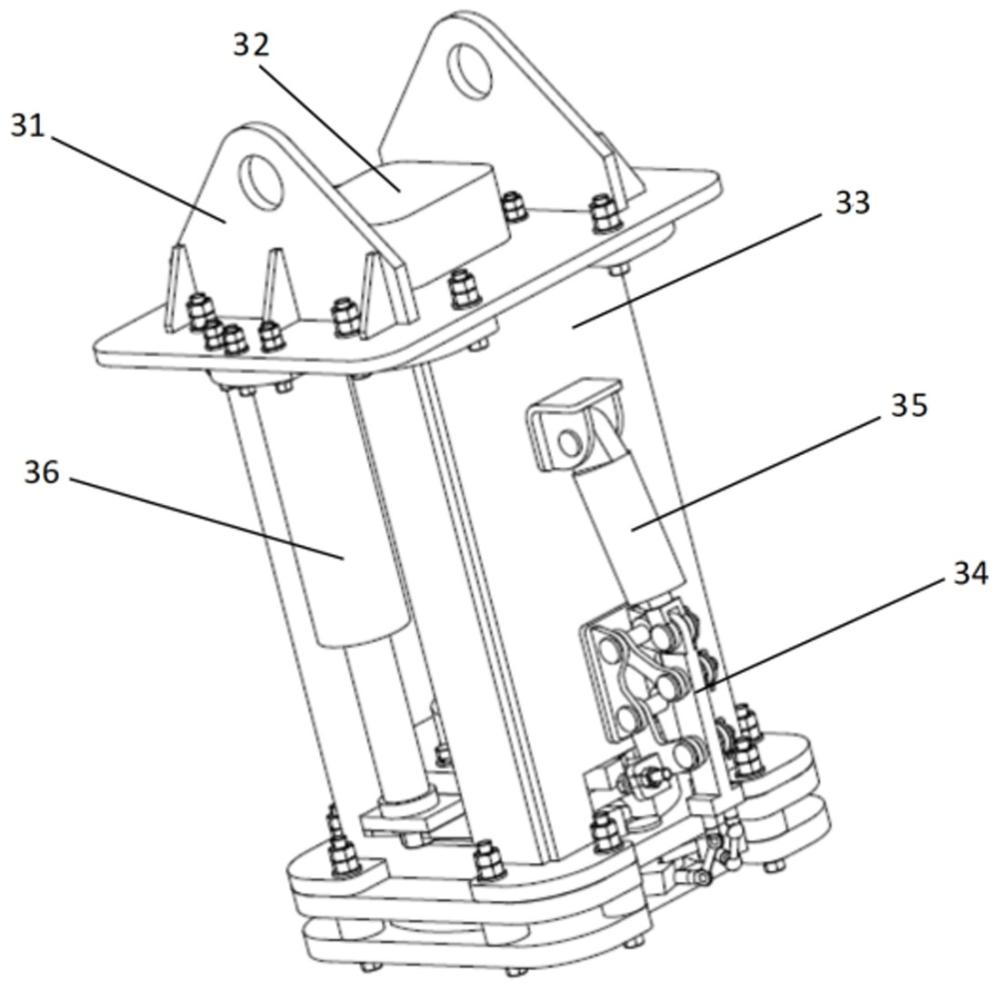
4、进一步的,所述抓取机构壳体的顶部安装有连接吊机的连接座,所述连接座上设有连接孔,连接孔与吊机的吊臂前端通过销轴连接。
5、进一步的,所述抓取机构壳体的顶部安装有监测装置,用于监测抓取机构抓取地埋式垃圾桶的工作状态。
6、进一步的,所述抓取机构壳体包括壳体、固定安装在壳体上的锁紧油缸座和空间连杆机构连接座;所述壳体两侧对称设置有长滑槽,用于抓手上下滑动;所述空间连杆机构连接座上安装有空间连杆机构。
7、进一步的,所述升降机构为固定端固定安装在抓取机构壳体顶部的提升油缸,所述提升油缸的活动端与抓手连接。
8、进一步的,所述抓手包含通过连接件连接在一起的下连接板和上盖板、通过法兰与上盖板连接在一起的导向套筒、上下滑动设置在导向套筒内部的检测套筒、第一传感器、第二传感器;所述上抱爪机构安装在抓手的下连接板与上盖板之间。
9、进一步的,所述锁紧机构包含安装在抓取机构壳体上的空间连杆机构、在抓取机构壳体和空间连杆机构之间铰接连接的锁紧油缸;所述空间连杆机构通过锁紧油缸控制上抱爪机构、下抱爪机构的闭合或开启。
10、进一步的,所述空间连杆机构包含传力连杆、i型连杆、l型连杆;所述传力连杆上端与锁紧油缸铰接,下端通过万向连接杆与下抱爪机构连接;通过锁紧油缸驱动空间连杆机构的传力连杆,传力连杆通过万向连接杆驱动下抱爪机构打开与锁紧、通过l型连杆推动上抱爪机构使其锁紧。
11、进一步的,所述上抱爪机构包含左锁紧板、右锁紧板、扭簧;所述左锁紧板与右锁紧板通过销轴和扭簧连接安装;所述上抱爪机构通过空间连杆机构驱动,实现自动锁紧,通过扭簧实现自动打开。
12、进一步的,所述下抱爪机构包含通过连接件连接在一起的顶板和底板、左抱爪、右抱爪、检测板、第三传感器;所述左抱爪、右抱爪安装在顶板和底板之间,并通过销轴连接在一起;所述检测板、第三传感器安装在顶板上,用于检测地埋式垃圾桶的起吊抓头位置。
13、进一步的,所述地埋式垃圾桶上设置有启闭抓头和起吊抓头;所述启闭抓头用于控制地埋式垃圾桶底盖的启闭;所述起吊抓头用于控制地埋式垃圾桶的起吊;所述上抱爪机构的上表面与启闭抓头下表面配合,通过抓手带动上抱爪机构上下滑动实现地埋式垃圾桶底盖的自动启闭;所述下抱爪机构的上表面与起吊抓头下表面配合,通过吊机吊起抓取机构将地埋式垃圾桶吊起。
14、一种地埋式垃圾桶抓取方法,是通过上述任一种地埋式垃圾桶抓取装置和上述地埋式垃圾桶相配合而实现的,具体包含以下步骤:
15、步骤1、抓取机构定位:控制吊机将抓取机构运动到地埋式垃圾桶上方;
16、步骤2、抓取对接:通过吊机驱动抓取机构下降,使抓取机构与地埋式垃圾桶的抓头进行对接;对接到位后,抓取机构停止下降;
17、步骤3、抓取抓头:由吊装式垃圾车的控制单元自动驱动抓取机构抓取锁紧地埋式垃圾桶的启闭抓头和起吊抓头,完成自动抓取;
18、步骤4、吊装准备:抓取机构驱动启闭抓头向上运动,使启闭抓头处于上位,确保地埋式垃圾桶底盖处于关闭锁紧状态;
19、步骤5、起吊转移:由吊装式垃圾车的控制单元控制吊机使抓取机构带动起吊抓头垂直向上起吊,使地埋式垃圾桶向上运动;然后再将地埋式垃圾桶吊运至吊装式垃圾车投料口的上端;
20、步骤6、卸料:抓取机构驱动启闭抓头向下运动,启闭抓头下降使地埋式垃圾桶的底盖自动开启,地埋式垃圾桶内的垃圾落入吊装式垃圾车投料口,进行卸料;
21、步骤7、关闭底盖:抓取机构驱动启闭抓头向上运动,启闭抓头上升使地埋式垃圾桶的底盖自动关闭;待底盖完全关闭后,吊机驱动抓取机构将地埋式垃圾桶放回基础基坑内;
22、步骤8、抓取分离:抓取机构驱动启闭抓头向下运动至下位状态;由控制单元控制吊机驱动抓取机构释放地埋式垃圾桶的启闭抓头和起吊抓头,同时吊机驱动抓取机构上升,完成自动分离。
23、与现有技术相比,本发明的有益效果是:
24、本发明一种地埋式垃圾桶抓取装置,替代原随车起重机吊钩,通过随车吊机驱动抓取装置抓取地埋式垃圾桶顶部抓头实现地埋式垃圾桶的自动抓取;通过抓取机构的锁紧油缸和提升油缸驱动上抱爪机构和下抱爪机构完成地埋式垃圾桶的抱紧与底盖启闭,实现了地埋式垃圾桶的自动吊装卸料,无需人工参与操作;
25、本发明一种地埋式垃圾桶抓取方法,通过随车吊机将抓取机构运动至地埋式垃圾桶顶部,通过随车吊机驱动抓取机构抓取地埋式垃圾桶顶部抓头实现地埋式垃圾桶的自动抓取;完成地埋式垃圾桶抓取之后,通过从随车吊机驱动抓取机构的锁紧油缸和提升油缸,完成地埋式垃圾桶抓手的抓取锁紧与底盖自动启闭,避免了手动挂起吊链条、避免手动拉拽绳索开启底盖,全程自动化操作,避免了吊装作业过程中垃圾桶的晃动造成的垃圾洒落与污水泄漏,减少了对环境的二次污染,提升了作业舒适性、作业效率及作业的环保性。
- 还没有人留言评论。精彩留言会获得点赞!