一种精准定位的软体抓取机构的制作方法
本技术涉及机构,尤其是一种精准定位的软体抓取机构。
背景技术:
1、机构意思指由两个或两个以上构件通过活动联接形成的构件系统,按组成的各构件间相对运动的不同,机构可分为平面机构和空间机构,按运动副类别可分为低副机构和高副机构,按结构特征可分为连杆机构、齿轮机构、斜面机构、棘轮机构等,按所转换的运动或力的特征可分为匀速和非匀速转动机构、直线运动机构、换向机构、间歇运动机构等,按功用可分为安全保险机构、联锁机构、擒纵机构等,在运动链中,如果将其中某一构件加以固定而成为机架,则该运动链便成为机构,是具有确定相对运动的构件组合,它是用来传递运动和力的构件系统。
2、机构可根据工作环境、内容或功能分类为诸多类型,其中包含了软体抓取机构,传统软体抓取机构多数侧重与软体抓取时对软体防护功能,此类软体抓取机构在对加工件进行抓取时,容易因该装置无法对其进行精准定位,导致该装置对软体的抓取过程中出现偏差或抓取失败的现象,为此我们提出一种精准定位的软体抓取机构解决上述问题。
技术实现思路
1、本实用新型的目的在于提供一种精准定位的软体抓取机构,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
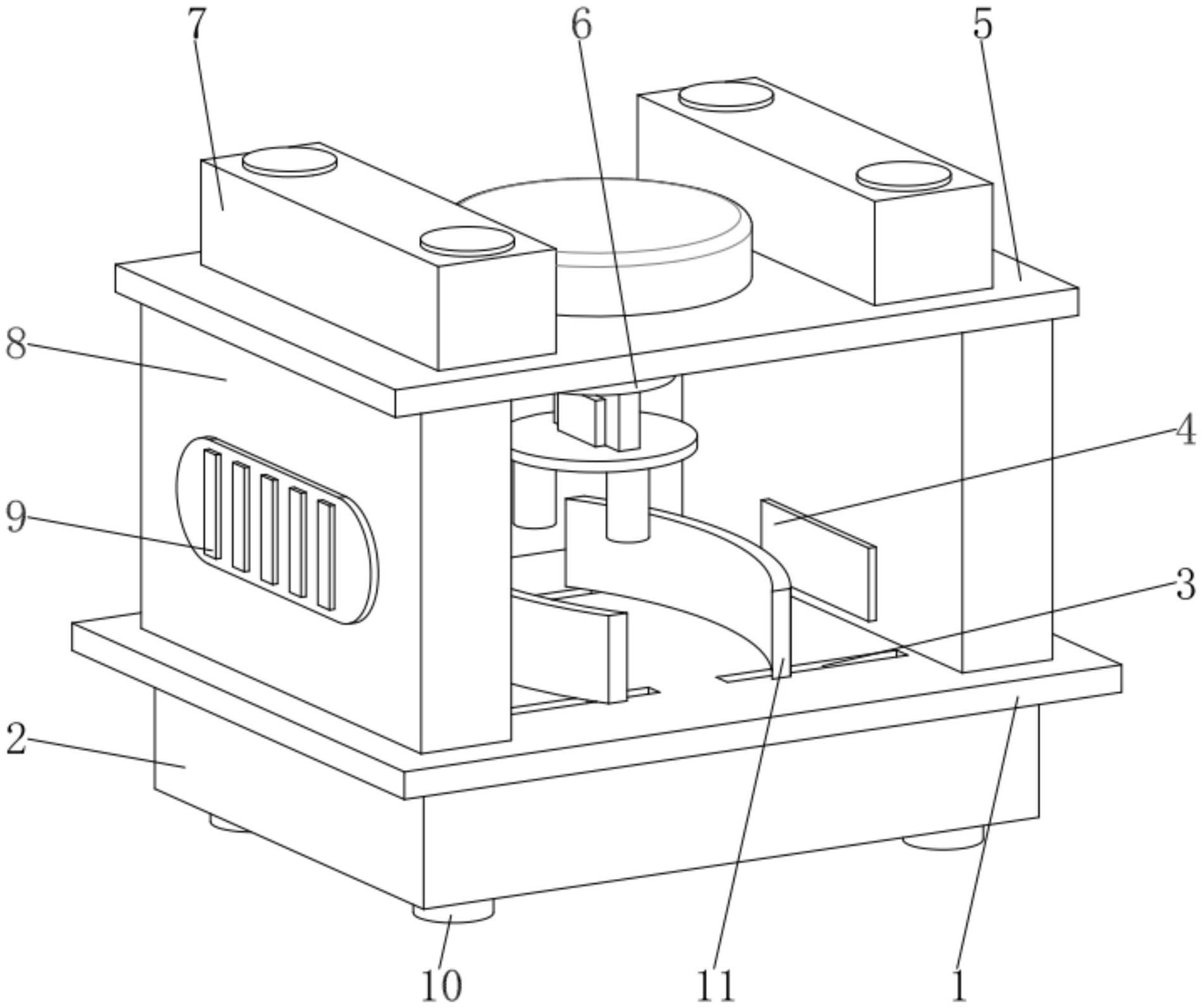
3、一种精准定位的软体抓取机构,包括基板,所述基板的上表面固定连接有相对称的立板,两个所述立板的顶端共同固定连接有横板,所述横板的上表面固定连接有控制机组,所述横板的底面固定连接有抓取杆,所述基板的上表面开设有两组相对称的滑槽,所述基板的上表面放置有相对称的夹板,所述基板的底面固定连接有框体,所述框体的内侧壁固定连接有挡板,所述挡板的底面固定连接有相对称的隔板,每个所述隔板的底端均与框体的内底壁固定连接,所述框体的内底壁放置有蓄电池,所述蓄电池的上表面与挡板的底面相接触,所述框体的内侧壁固定连接有两组相对称的电动伸缩杆,两组所述电动伸缩杆相互靠近的一端均共同固定连接有顶板,每个所述顶板的顶端均固定连接有连接杆,每组所述连接杆的顶端均贯穿滑槽并与夹板的底端固定连接。
4、在进一步的实施例中,所述框体的下方设有两组相对称的防滑垫,每组所述防滑垫的上表面均与框体的底面固定连接。
5、在进一步的实施例中,所述基板的上方设有相对称的防护板,两个所述防护板相互靠近的一侧面分别与两个立板相互远离的一侧面固定连接。
6、在进一步的实施例中,所述基板的上方设有相对称的缓冲垫,两个所述缓冲垫相互远离的一侧面分别与两个立板相互靠近的一侧面固定连接。
7、在进一步的实施例中,所述框体的内部设有限位板,所述限位板的底端与挡板的上表面固定连接。
8、在进一步的实施例中,所述框体的内部设有相对称的配重块,每个所述配重块的底面均与框体的内底壁相接触。
9、与现有技术相比,本实用新型的有益效果是:
10、本装置设置有夹板,能够对被抓取物进行推动定位,避免工人容易因该装置不具备精准定位功能出现使用不便的现象,通过设置有电动伸缩杆,能够为该装置的定位过程提供所需动力,避免该装置容易因动力不足出现定位失败的现象,通过顶板与连接杆的配合,能够对夹板进行推动,避免该装置容易因夹板无法移动出现定位困难的现象。
技术特征:
1.一种精准定位的软体抓取机构,其特征在于:包括基板(1),所述基板(1)的上表面固定连接有相对称的立板(8),两个所述立板(8)的顶端共同固定连接有横板(5),所述横板(5)的上表面固定连接有控制机组(7),所述横板(5)的底面固定连接有抓取杆(6),所述基板(1)的上表面开设有两组相对称的滑槽(3),所述基板(1)的上表面放置有相对称的夹板(11),所述基板(1)的底面固定连接有框体(2),所述框体(2)的内侧壁固定连接有挡板(13),所述挡板(13)的底面固定连接有相对称的隔板(14),每个所述隔板(14)的底端均与框体(2)的内底壁固定连接,所述框体(2)的内底壁放置有蓄电池(15),所述蓄电池(15)的上表面与挡板(13)的底面相接触,所述框体(2)的内侧壁固定连接有两组相对称的电动伸缩杆(12),两组所述电动伸缩杆(12)相互靠近的一端均共同固定连接有顶板(18),每个所述顶板(18)的顶端均固定连接有连接杆(16),每组所述连接杆(16)的顶端均贯穿滑槽(3)并与夹板(11)的底端固定连接。
2.根据权利要求1所述的一种精准定位的软体抓取机构,其特征在于:所述框体(2)的下方设有两组相对称的防滑垫(10),每组所述防滑垫(10)的上表面均与框体(2)的底面固定连接。
3.根据权利要求1所述的一种精准定位的软体抓取机构,其特征在于:所述基板(1)的上方设有相对称的防护板(9),两个所述防护板(9)相互靠近的一侧面分别与两个立板(8)相互远离的一侧面固定连接。
4.根据权利要求1所述的一种精准定位的软体抓取机构,其特征在于:所述基板(1)的上方设有相对称的缓冲垫(4),两个所述缓冲垫(4)相互远离的一侧面分别与两个立板(8)相互靠近的一侧面固定连接。
5.根据权利要求1所述的一种精准定位的软体抓取机构,其特征在于:所述框体(2)的内部设有限位板(17),所述限位板(17)的底端与挡板(13)的上表面固定连接。
6.根据权利要求1所述的一种精准定位的软体抓取机构,其特征在于:所述框体(2)的内部设有相对称的配重块(19),每个所述配重块(19)的底面均与框体(2)的内底壁相接触。
技术总结
本技术公开了一种精准定位的软体抓取机构,包括基板,所述基板的上表面固定连接有相对称的立板,两个所述立板的顶端共同固定连接有横板,所述横板的上表面固定连接有控制机组,所述横板的底面固定连接有抓取杆,所述基板的上表面开设有两组相对称的滑槽,所述基板的上表面放置有相对称的夹板,所述基板的底面固定连接有框体,所述框体的内侧壁固定连接有挡板,所述挡板的底面固定连接有相对称的隔板。本装置设置有夹板,能够对被抓取物进行推动定位,避免工人容易因该装置不具备精准定位功能出现使用不便的现象,通过设置有电动伸缩杆,能够为该装置的定位过程提供所需动力,避免该装置容易因动力不足出现定位失败的现象。
技术研发人员:王宇,张新彬,孙云鹏
受保护的技术使用者:江苏天东智造机器人有限公司
技术研发日:20230506
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!