一种小型巷道堆垛机的制作方法
本技术涉及一种堆垛机,具体涉及一种小型巷道堆垛机。
背景技术:
1、随着半导体行业的发展,晶圆加工是半导行业的重要环接,而晶圆的存储周转实现自动化储存是各企业利润增涨点和商机,目前市场上存储方式大多是小型半自动化设备,或者是人工,效率极低而且容易出错比较费力。后来有些企业采用agv小车搭载协作型机器人,虽然效率和自动化有所提升,但是只局限于小型轻型晶圆盒,且不能用于高度2米以上的货物存储,制造成本偏高。
2、具体缺点如下:
3、1、其负载较小,并且每2月便需要对其进行位置校准。
4、2、采用丝杆传动故障率较大,并且具有噪声污染,丝杆螺母出现故障率高更换困难。
技术实现思路
1、本实用新型所要解决的技术问题是提供一种小型巷道堆垛机,通过对x轴、z轴y轴的改进设计,以解决背景技术中所存在的问题。
2、本实用新型小型巷道堆垛机是通过以下技术方案来实现的:包括:
3、x轴模组,x轴模组设置于地轨上,且x轴模组通过第一电机驱动;
4、z轴模组,z轴模组设置于x轴模组的活动端上,且z 轴模组通过第二电机驱动;
5、y轴模组,y轴模组设置于z轴模组的活动端上,且y轴模组通过第三电机驱动;
6、r轴模组,r轴模组设置于y轴模组的活动端上,且r轴模组通过旋转电机驱动;r轴模组的输出端上设置有货叉。
7、作为优选的技术方案,x轴模组包括设置于地轨上的第一导轨滑块以及滚子齿轮齿条,z轴模组通过第一导轨滑块导向,并通过滚子齿轮齿条带动z轴模组传动;所述滚子齿轮齿条通过第一电机驱动。
8、作为优选的技术方案,z轴模组包括支撑构件以及设置于支撑构件上的同步带和第二导轨滑块,y轴模组通过第二导轨滑块导向,并通过同步带传动;同步带通过第二电机驱动。
9、作为优选的技术方案,y轴模组为直线模组,且直线模组通过第三电机驱动。
10、作为优选的技术方案,r轴模组包括中空减速机以及中空旋转台,中空减速机的输出轴与中空旋转台连接,且旋转电机与中空减速机的输入端连接,通过旋转电机带动中空旋转台转动;中空旋转台上安装有货叉。
11、作为优选的技术方案,支撑构件背面设置有随车电箱,地轨上设置有与随车电箱相对应的拖链。
12、作为优选的技术方案,支撑构件背面设置有多组护梯,且护梯位于随车电箱上方。
13、本实用新型的有益效果是:
14、1、本实用新型x轴采用滚子齿轮齿条传动,使其定位精度更高,并且无需对其进行位置校准。
15、2、本实用新型z轴采用同步带传动,其速度负载不变且故障率降底,并且无噪音,使用效果更好。
16、3、本实用新型y轴采用直线模组结构简单维修方便具有防尘效果。
技术特征:
1.一种小型巷道堆垛机,其特征在于,包括:
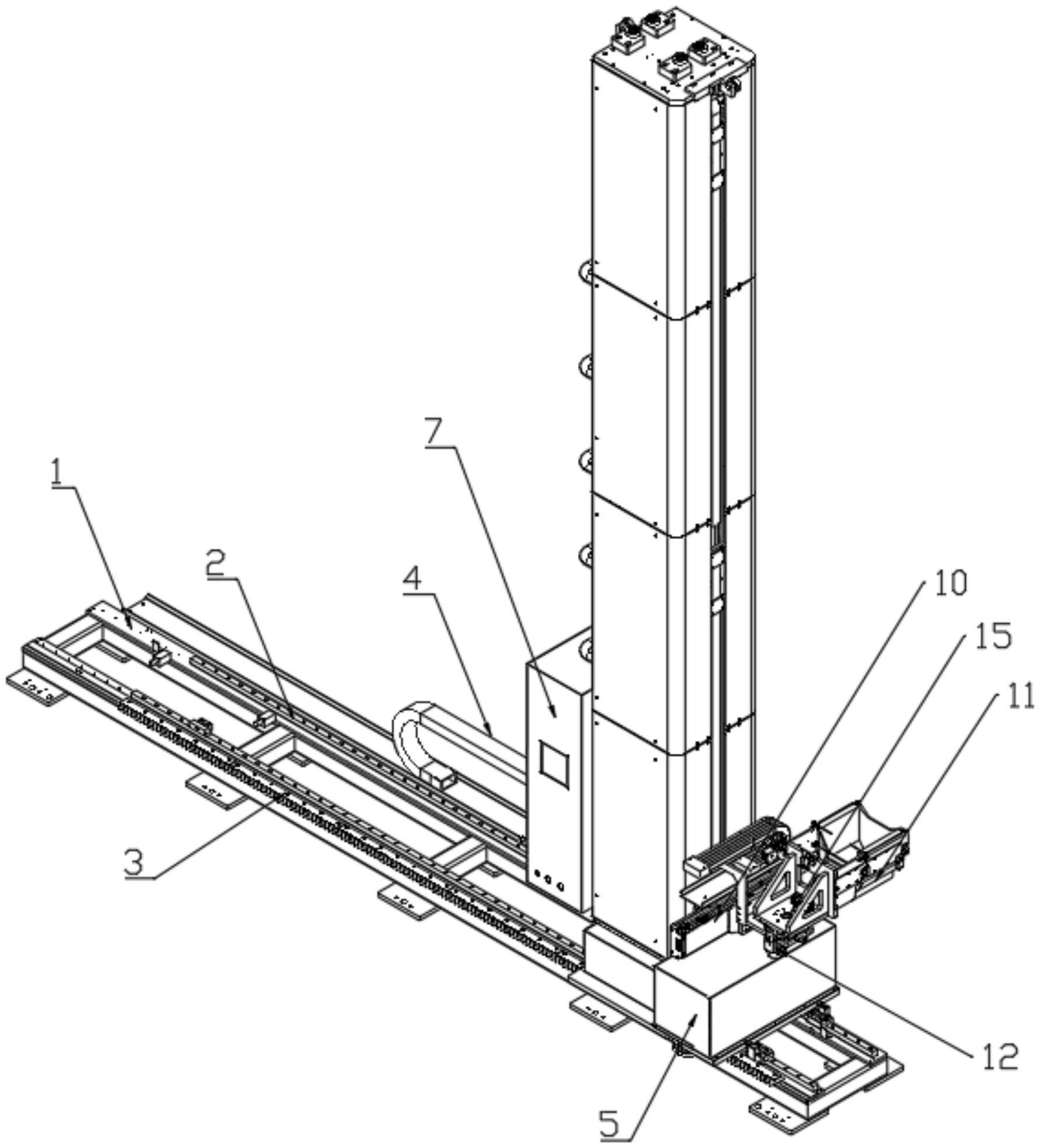
2.根据权利要求1所述的小型巷道堆垛机,其特征在于:所述x轴模组包括设置于地轨(1)上的第一导轨滑块(2)以及滚子齿轮齿条(3),z轴模组通过第一导轨滑块(2)导向,并通过滚子齿轮齿条(3)带动z轴模组传动;所述滚子齿轮齿条(3)通过第一电机(5)驱动。
3.根据权利要求1所述的小型巷道堆垛机,其特征在于:所述z轴模组包括支撑构件(9)以及设置于支撑构件(9)上的同步带(13)和第二导轨滑块(14),y轴模组通过第二导轨滑块(14)导向,并通过同步带(13)传动;所述同步带通过第二电机(6)驱动。
4.根据权利要求1所述的小型巷道堆垛机,其特征在于:所述y轴模组为直线模组(10),且直线模组(10)通过第三电机驱动。
5.根据权利要求1所述的小型巷道堆垛机,其特征在于:所述r轴模组包括中空减速机(12)以及中空旋转台(15),中空减速机(12)的输出轴与中空旋转台(15)连接,且旋转电机与中空减速机(12)的输入端连接,通过旋转电机带动中空旋转台(15)转动;所述中空旋转台(15)上安装有货叉(11)。
6.根据权利要求3所述的小型巷道堆垛机,其特征在于:所述支撑构件(9)背面设置有随车电箱(7),地轨(1)上设置有与随车电箱(7)相对应的拖链(4)。
7.根据权利要求3所述的小型巷道堆垛机,其特征在于:所述支撑构件(9)背面设置有多组护梯(8),且护梯(8)位于随车电箱(7)上方。
技术总结
本技术公开了一种小型巷道堆垛机,包括:X轴模组,所述X轴模组设置于地轨上,且X轴模组通过第一电机驱动;Z轴模组,所述Z轴模组设置于X轴模组的活动端上,且Z轴模组通过第二电机驱动;Y轴模组,所述Y轴模组设置于Z轴模组的活动端上,且Y轴模组通过第三电机驱动;R轴模组,所述R轴模组设置于Y轴模组的活动端上,且R轴模组通过旋转电机驱动;所述R轴模组的输出端上设置有货叉。本技术采用滚子齿轮齿条传动,使其定位精度更高,并且无需对其进行位置校准。
技术研发人员:方慧,谢劲松,何兆义
受保护的技术使用者:深圳市因特格机器人有限公司
技术研发日:20230515
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!