一种变轨夹具的制作方法
本技术涉及一种机械手夹具,具体涉及一种变轨夹具。
背景技术:
1、为了提高生产效率,现如今的产品包装一般采用机电结合的自动化包装流水线来实现。使用机械手代替人工将产品装填至包装盒中,以实现快速、高效的产品生产效率、从而降低人工劳动强度。而针对一些具有特殊形状的包装盒,例如心形、异形等形状的巧克力包装盒,其中有些产品填充空位并不属于常规的直线形状,因此需要特殊的夹具结构形式来实现产品夹取,而此时需要通过停机更换夹具来适应填充形状,为产品的自动生产造成不便。
2、现有技术中,公开号为cn104723352a,公开日为2015年06月24日,名称为“一种万能机械手”的中国发明专利,公开了如下技术方案:一种机械手,包括抓盘,在所 述的抓盘的下侧设有三个相互独立的抓手,所述的每个抓手均包括一个压紧轮、一个上臂、 一个下臂、一个滑轮、一个真空吸盘以及两根钢丝绳,所述的压紧轮通过一个铰支座和一根销轴与所述的抓盘相铰接,所述的上臂一端与所述的铰支座固定连接,并且上臂与竖直方向具有倾斜角向外倾斜设置,上臂的另一端通过水平设置的滑轮轴与下臂相铰接,在滑轮轴上可转动设有滑轮,在下臂的另一端通过一个球铰连接所述的真空吸盘,在所述的压紧轮上对称设有两个凸缘,所述的两根钢丝绳的一端分别与两个凸缘固定连接,两根钢丝绳的另一端分别与球铰的内外侧固定连接,位于外侧的钢丝绳中部饶设在所述的滑轮上;在压紧轮以及铰支座上均设有用于安装固定销的孔。
3、上述专利中的机械手其变形调节方式是依靠压紧轮的旋转,带动钢丝绳的收放,对上臂和下臂之间的夹角进行调节,进而呈现不同的形状,以适应不同大小的圆直径。首先,该专利可调节的抓手上下臂连接结构复杂,并且其抓手角度是在同一个竖直平面内变化,而无法实现水平方向同一高度的结构形式变化,不适用于同一水平面内的各个产品的抓取。
技术实现思路
1、本实用新型旨在解决现有技术中的机械抓手无法适应某些特殊形状包装盒的产品填装,导致产品装填效率低的问题,提出了一种变轨夹具,该变轨夹具通过驱动机构做往复直线运动,使传动机构带动活动抓手在与固定抓手等高平面的多个工位之间变换,在不同的工位与固定抓手构成不同形状的夹具,可实现异形填充空位的产品快速装填,提高生产效率。
2、为了实现上述实用新型目的,本实用新型的技术方案如下:
3、一种变轨夹具,包括:固定抓手、活动抓手、驱动机构及传动机构;活动抓手通过传动机构与驱动机构连接,驱动机构做往复直线运动,使传动机构带动活动抓手在与固定抓手等高平面的多个工位之间变换,在不同的工位与固定抓手构成不同形状的夹具。
4、进一步的,所述驱动机构为气缸,所述气缸固定设置在连接板上,所述连接板又同时与机械手安装座连接。
5、进一步的,所述直线运动组件为气缸,所述气缸上连接有气缸推板,所述的气缸推板滑动连接在气缸的底部,在气缸作用下做往复直线运动。
6、进一步的,所述固定抓手位于气缸推板推出方向的前端,固定设置在所述连接板上。
7、进一步的,所述传动机构包括转动连接的助力杆和拉杆;助力杆的一端转动连接在气缸推板的推出前端,另一端与拉杆相连,活动抓手连接在所述拉杆上。
8、进一步的,所述传动机构为对称结构,助力杆包括对称设置的左助力杆和右助力杆,拉杆包括对称设置的左拉杆和右拉杆,拉杆和助力杆的对称轴线重合,左助力杆和右助力杆一端转动连接在气缸推板上,另一端与各自对应的左助力杆和右助力杆转动连接。
9、进一步的,在左拉杆和右拉杆的长边端头分别对称固定连接有活动抓手,其短边端头连接在同一个铰轴上。
10、进一步的,所述固定抓手位于左拉杆和右拉杆之间,处于两侧活动抓手的对称中心上,两侧的活动抓手到所述固定抓手的距离相等。
11、进一步的,所述的固定抓手与活动抓手均包括螺杆与连接在螺杆端部的吸盘,固定抓手的螺杆通过螺母固定连接在连接板上,活动抓手的螺杆通过螺母连接在对应的拉杆上。
12、进一步的,与吸盘连接的螺杆为中空结构,螺杆外接真空发生装置使吸盘具备吸附力。
13、本实用新型的工作原理:
14、夹具整体通过机械手安装座安装在机械手或者其他动力装置上使用,夹具具体动作为:拉杆和助力杆可以通过铰链摆动,起始状态三个(可以多个)吸盘(或者夹爪)为等间距直线状态(也可以是圆弧形,只要是等间距即可)。要变换轨迹的时候气缸推动气缸推板,然后气缸推板通过铰链带动左右助力杆摆动,左右助力杆又通过铰轴带动左右拉杆摆动从而将安装在左右拉杆上的活动抓手运动到心形状态完成整个变换轨迹的过程。
15、综上所述,本实用新型具有以下优点:
16、1、本实用新型通过驱动机构做往复直线运动,使传动机构带动活动抓手在与固定抓手等高平面的多个工位之间的快速变换,在不同的工位与固定抓手构成不同形状的夹具,可实现异形填充空位的产品快速装填,避免夹具重复更换,提高了生产效率;
17、2、本实用新型中的固定抓手和活动抓手均包括螺杆与连接在螺杆端部的吸盘(也可以是夹爪)。固定抓手的螺杆通过螺母固定连接在连接板上,活动抓手的螺杆通过螺母连接在各自的拉杆上。通过调节螺杆可以调整抓手的整体高度。
技术特征:
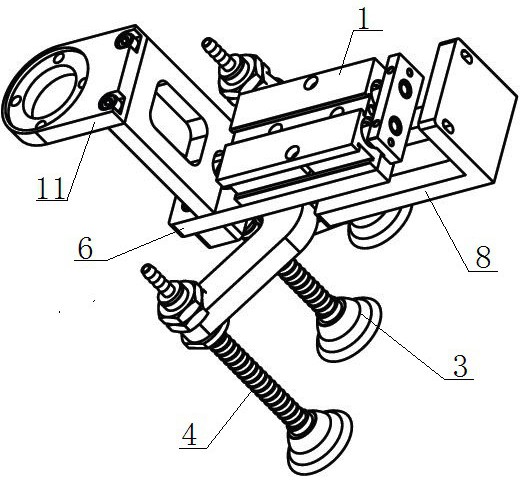
1.一种变轨夹具,其特征在于,包括:固定抓手(3)、活动抓手(4)、驱动机构(1)及传动机构(2);活动抓手(4)通过传动机构(2)与驱动机构(1)连接,驱动机构(1)做往复直线运动,使传动机构(2)带动活动抓手(4)在与固定抓手(3)等高平面的多个工位之间变换,在不同的工位与固定抓手(3)构成不同形状的夹具。
2.根据权利要求1所述的一种变轨夹具,其特征在于,所述驱动机构(1)为气缸(5),所述气缸(5)固定设置在连接板(6)上,所述连接板(6)又同时与机械手安装座连接。
3.根据权利要求2所述的一种变轨夹具,其特征在于,所述直线运动组件为气缸(5),所述气缸(5)上连接有气缸推板(8),所述的气缸推板(8)滑动连接在气缸(5)的底部,在气缸(5)作用下做往复直线运动。
4.根据权利要求3所述的一种变轨夹具,其特征在于,所述固定抓手(3)位于气缸推板(8)推出方向的前端,固定设置在所述连接板(6)上。
5.根据权利要求1所述的一种变轨夹具,其特征在于,所述传动机构(2)包括转动连接的助力杆和拉杆;助力杆的一端转动连接在气缸推板(8)的推出前端,另一端与拉杆相连,活动抓手(4)连接在所述拉杆上。
6.根据权利要求5所述的一种变轨夹具,其特征在于,所述传动机构(2)为对称结构,助力杆包括对称设置的左助力杆(201)和右助力杆(202),拉杆包括对称设置的左拉杆(203)和右拉杆(204),拉杆和助力杆的对称轴线重合,左助力杆(201)和右助力杆(202)一端转动连接在气缸推板(8)上,另一端与各自对应的左助力杆(201)和右助力杆(202)转动连接。
7.根据权利要求6所述的一种变轨夹具,其特征在于,所述左拉杆(203)和右拉杆(204)为l型结构,在左拉杆(203)和右拉杆(204)的长边端头分别对称固定连接有活动抓手(4),其短边端头连接在同一个铰轴(7)上。
8.根据权利要求1所述的一种变轨夹具,其特征在于,所述固定抓手(3)位于左拉杆(203)和右拉杆(204)之间,处于两侧活动抓手(4)的对称中心上,两侧的活动抓手(4)到所述固定抓手(3)的距离相等。
9.根据权利要求1所述的一种变轨夹具,其特征在于,所述的固定抓手(3)与活动抓手(4)均包括螺杆(9)与连接在螺杆(9)端部的吸盘(10),固定抓手(3)的螺杆(9)通过螺母固定连接在连接板(6)上,活动抓手(4)的螺杆(9)通过螺母连接在对应的拉杆上。
10.根据权利要求9所述的一种变轨夹具,其特征在于,与吸盘(10)连接的螺杆(9)为中空结构,螺杆(9)外接真空发生装置使吸盘(10)具备吸附力。
技术总结
本技术公开了一种变轨夹具,属于机械夹具技术领域,包括:固定抓手、活动抓手、驱动机构及传动机构;活动抓手通过传动机构与驱动机构连接,驱动机构驱动传动机构带动活动抓手在与固定抓手等高平面的多个工位之间变换,在不同的工位与固定抓手构成不同形状的夹具。本技术通过可变形的夹具结构,可实现异形填充空位的产品快速装填,提高自动化生产效率。
技术研发人员:梁明通
受保护的技术使用者:成都宇俊盛科技有限公司
技术研发日:20230720
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!