一种基于激光雷达的搬运系统的制作方法
本发明涉及搬运系统领域,具体指有一种基于激光雷达的搬运系统。
背景技术:
1、集装箱又称货柜,是指具有一定强度、刚度和规格专供周转使用的大型装货容器,将货物放置于集装箱内,再通过集装箱运输至目的地。目前,将货物输送并转运至集装箱内,装载入货车/集装箱内一般有人力装车或叉车装车等方式。
2、集装箱从装货、货车运输到卸货的使用过程中,常常会出现损坏,例如集装箱超载、载重分布不均、货物捆绑松散或垫料不足,或者与外部碰撞、高温暴晒等,都会导致集装箱变形,集装箱常见的变形是内凹。为了尽可能地保证集装箱的运输效率,货物的宽度一般会设置为略小于集装箱的宽度,而当集装箱内出现内凹变形后,货物将会出现难以进入集装箱的情况。现有技术中,一般是通过叉车进出集装箱进行装卸货,而叉车为了使货物能够进入出现内凹、变形后的集装箱,需要频繁地调整方向,存在装卸货效率低的问题。
3、针对上述的现有技术存在的问题设计一种基于激光雷达的搬运系统是本发明研究的目的。
技术实现思路
1、针对上述现有技术存在的问题,本发明在于提供一种基于激光雷达的搬运系统,能够有效解决上述现有技术存在的至少一个问题。
2、本发明的技术方案是:
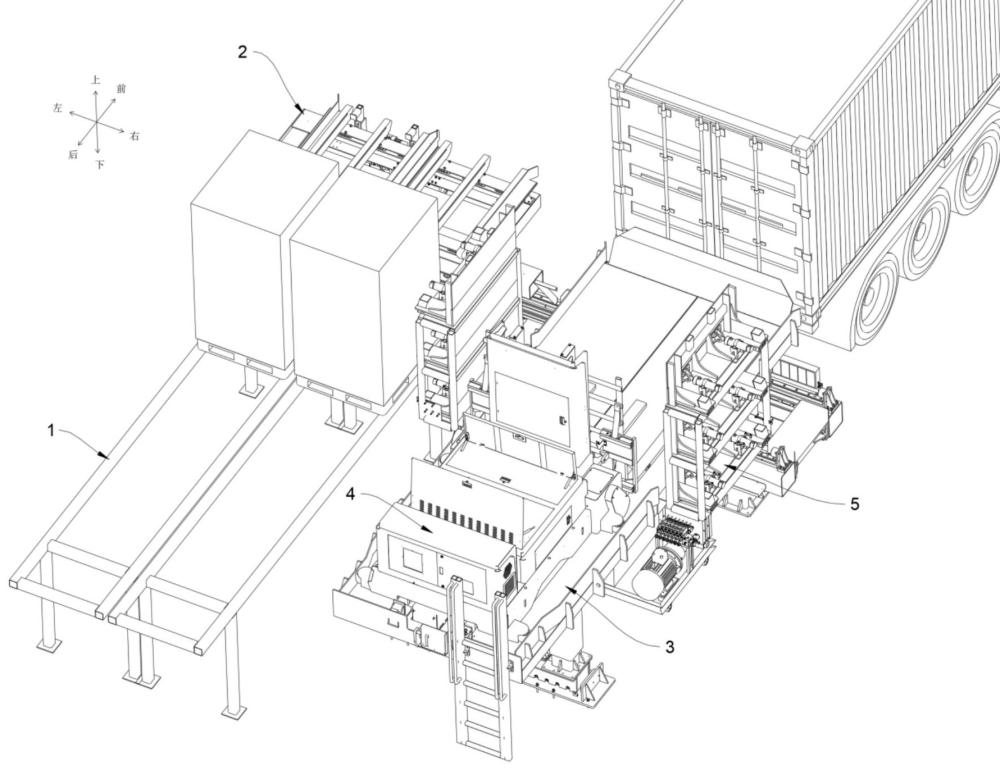
3、一种基于激光雷达的搬运系统,包括:
4、若干输送轨道,用于输送货物;
5、横移输送机构,包含横移输送机,以及被所述横移输送机横向驱动的横移输送机架,所述横移输送机架为u字形,所述横移输送机架的开口朝向所述横移输送机构的出料端,所述横移输送机构的进料端对应设置于所述输送轨道的出料端,用于接收所述输送轨道运输至的货物;
6、升降平台,可上下升降和/或侧移设置,所述升降平台的一端延伸至所述横移输送机的上方,当所述横移输送机架运行至所述横移输送机构的出料端,所述升降平台的一端位于所述横移输送机架的开口的内部,所述升降平台的出料端朝向相应的集装箱;
7、激光雷达,所述激光雷达设置于所述横移输送机架,所述横移输送机架移动至靠近所述升降平台的位置时,所述激光雷达用于扫描所述集装箱的内部情况,所述横移输送机架移动至靠近所述输送轨道的位置时,所述激光雷达用于扫描所述输送轨道上的货物托盘情况;
8、智能小车,可前后行驶设置于所述升降平台;
9、一对整料机构,所述整料机构相对设置于所述升降平台的中间位置;
10、控制系统,所述控制系统根据所述激光雷达获取到的所述集装箱的内部情况以及货物托盘位置,控制所述横移输送机架移动至所述升降平台上方的相应位置,使所述货物托盘避开所述集装箱的内壁底部的变形区域,以及控制所述整料机构对相应的货物进行整形,使货物的形状与所述集装箱的内壁中部和高部的形状相适配。
11、进一步地,所述横移输送机架的上端部的底面设置有驱动件,所述驱动件驱动所述激光雷达前后移动,所述激光雷达被驱动至所述横移输送机架的后端且所述横移输送机架移动至靠近所述输送轨道的位置时,所述激光雷达可扫描所述输送轨道上的货物托盘情况,所述激光雷达被驱动至所述横移输送机架的前端且所述横移输送机架移动至靠近所述升降平台的位置时,所述激光雷达可扫描所述集装箱内部的情况。
12、进一步地,所述控制系统用于在集装箱对接至所述升降平台后,控制所述驱动件将所述激光雷达向前移动,使所述激光雷达的扫描视野覆盖所述集装箱;r
13、所述控制系统用于在货物到达所述输送轨道的出料端后,控制所述驱动件将所述激光雷达向后移动,使所述激光雷达的扫描视野覆盖所述货物托盘。
14、进一步地,所述升降平台设置有导向板,所述智能小车的左右两侧设置有限位轮,所述导向板和所述限位轮的配合限制所述智能小车的行驶方向为前后。
15、进一步地,所述集装箱的内部情况包括集装箱内壁的底部凸起,所述货物托盘位置包括所述货物托盘在所述输送轨道的左右偏移量;
16、所述控制系统根据所述左右偏移量和所述底部凸起,控制所述横移输送机架移动至所述升降平台上方的位置时,使所述货物托盘轮廓的正前方避开所述底部凸起。
17、进一步地,所述集装箱的内部情况包括集装箱内壁的中部凸起、高部凸起,所述控制系统根据所述中部凸起或高部凸起,在所述智能小车移动到所述整料机构之间时,控制所述整料机构对相应的货物的中部和高部进行整形。
18、进一步地,所述整料机构包括固定架,所述固定架固定设置于所述升降平台的中间位置,所述固定架从上往下依次设置有若干整料板,所述整料板通过相应的驱动缸驱动可朝向货物伸出;
19、所述控制系统根据所述中部凸起或高部凸起,控制相应的所述驱动缸的伸出量的货物进行夹抱,使货物被夹抱后的形状避开所述中部凸起或所述高部凸起。
20、进一步地,所述集装箱的内部情况包括集装箱内部存在异物;
21、集装箱内部存在异物时,所述控制系统拒绝所述智能小车行驶进入集装箱。
22、因此,本发明提供以下的效果和/或优点:
23、本发明通过激光雷达扫描集装箱内的情况和货物托盘的情况,可以精确控制货物托盘到达升降机构上方的位置,使智能小车叉取货物后直线进入集装车,避让集装箱内部的凸起位置,以及通过对货物进行整形,使其与集装箱内的凸起位置的形状进行适配,避开凸起的位置。因此,本发明的智能小车只需要前后直线移动,减少了智能小车转向等避让集装箱内凸起位置所需的时间或复杂判断,大大提高了装车效率。
24、本发明通过在横移输送机架的下方设置激光雷达,以及激光雷达可以前后移动的结构,通过一个激光雷达并给与激光雷达足够的覆盖范围实现对货物、集装箱的扫描,同时保持了横移输送机架可以对货物进行输送的功能。
25、本发明的其他特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点在说明书以及附图中所特别指出的结构来实现和获得。
26、应当明白,本发明的上文的概述和下面的详细说明是示例性和解释性的,并且意在提供对如要求保护的本发明的进一步的解释。
技术特征:
1.一种基于激光雷达的搬运系统,其特征在于:包括:
2.根据权利要求1所述的一种基于激光雷达的搬运系统,其特征在于:所述横移输送机架的上端部的底面设置有驱动件,所述驱动件驱动所述激光雷达前后移动,所述激光雷达被驱动至所述横移输送机架的后端且所述横移输送机架移动至靠近所述输送轨道的位置时,所述激光雷达可扫描所述输送轨道上的货物托盘情况,所述激光雷达被驱动至所述横移输送机架的前端且所述横移输送机架移动至靠近所述升降平台的位置时,所述激光雷达可扫描所述集装箱内部的情况。
3.根据权利要求2所述的一种基于激光雷达的搬运系统,其特征在于:所述控制系统用于在集装箱对接至所述升降平台后,控制所述驱动件将所述激光雷达向前移动,使所述激光雷达的扫描视野覆盖所述集装箱;r
4.根据权利要求1所述的一种基于激光雷达的搬运系统,其特征在于:所述升降平台设置有导向板,所述智能小车的左右两侧设置有限位轮,所述导向板和所述限位轮的配合限制所述智能小车的行驶方向为前后。
5.根据权利要求4所述的一种基于激光雷达的搬运系统,其特征在于:所述集装箱的内部情况包括集装箱内壁的底部凸起,所述货物托盘位置包括所述货物托盘在所述输送轨道的左右偏移量;
6.根据权利要求5所述的一种基于激光雷达的搬运系统,其特征在于:所述集装箱的内部情况包括集装箱内壁的中部凸起、高部凸起,所述控制系统根据所述中部凸起或高部凸起,在所述智能小车移动到所述整料机构之间时,控制所述整料机构对相应的货物的中部和高部进行整形。
7.根据权利要求6所述的一种基于激光雷达的搬运系统,其特征在于:所述整料机构包括固定架,所述固定架固定设置于所述升降平台的中间位置,所述固定架从上往下依次设置有若干整料板,所述整料板通过相应的驱动缸驱动可朝向货物伸出;
8.根据权利要求1所述的一种基于激光雷达的搬运系统,其特征在于:所述集装箱的内部情况包括集装箱内部存在异物;
技术总结
本发明涉及一种基于激光雷达的搬运系统,包括:若干输送轨道;横移输送机构;升降平台;激光雷达,所述激光雷达设置于所述横移输送机架,所述横移输送机架移动至靠近所述升降平台的位置时,所述激光雷达用于扫描所述集装箱的内部情况,所述横移输送机架移动至靠近所述输送轨道的位置时,所述激光雷达用于扫描所述输送轨道上的货物托盘情况;智能小车,可前后行驶设置于所述升降平台;一对整料机构,所述整料机构相对设置于所述升降平台的中间位置;控制系统,控制所述整料机构对相应的货物进行整形,使货物直线进入集装箱。
技术研发人员:彭恩奇,林仁兴,吴伟玲,郭杰龙,邓晓强,卢喜涛,李一帆,杜和钢
受保护的技术使用者:龙合智能装备制造有限公司
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!