一种危化品搬运机器人
本申请涉及机器人,具体涉及一种危化品搬运机器人。
背景技术:
1、危化品即危险化学品,是指具有易燃、易爆、有毒、有害和放射性等特性,在运输装卸和储存保管过程中易造成人员伤亡和财产损毁而需要特别保护的化学物品。在搬运盛有可燃气体、易燃液体的罐体时,防止互相撞击,不能抛掷,以免因产生火花或容器爆裂而造成火灾和爆炸事故。
2、现有技术中,对于罐装危化品的搬运主要依靠搬运装置,而随着机器人技术发展,目前已经利用机器人直接搬运罐体,与人工直接操作装置进行搬运相比,机器人的操作可以远程进行,整个搬运操作更加安全。
3、目前搬运机器人主要由车体、机械臂和机械爪组成,车体用于移动,机械臂用于改变机械爪角度方向,由机械爪完成对罐体的夹持,当出现紧急情况时,由机器人完成工作可以减少人员伤害,如危化品罐体出现泄漏时,依靠机器人完成对泄漏罐体转移和应急处理,但是目前搬运机器人还存在一些不足点:不同罐体所适配的夹具不同,而在应急处理中,快速反应是第一要素,而目前搬运机器人所配套的夹具往往是一种,无法配套多种不同夹具,若临时更换夹具则会浪费最佳处理时间。
4、因此本发明提出一种危化品搬运机器人。
技术实现思路
1、本申请的目的在于:为解决上述背景技术中的问题,本申请提供了一种危化品搬运机器人。
2、本申请为了实现上述目的具体采用以下技术方案:
3、一种危化品搬运机器人,包括:
4、运动基座,一侧开设有用于放置罐体的放置槽,所述运动基座上对称安装有两个多轴机械臂,所述运动基座上安装有摄像头;
5、转环机构,安装在所述多轴机械臂自由端,所述转环机构上安装有至少两种夹具,转环机构用于控制夹具的伸出;
6、连接机构,安装在所述转环机构上且通过转环机构控制其伸缩,还包括封堵板,其用于封堵放置槽开口,所述连接机构与封堵板可拆卸连接。
7、进一步地,所述转环机构包括安装在所述多轴机械臂自由端的安装架,所述安装架上圆形阵列构造有多个存放腔,所述存放腔内部滑动安装有移动架,其用于安装连接机构或夹具,所述安装架上安装有驱动所述移动架移动的驱动件。
8、进一步地,所述存放腔长度方向的一侧为开口,所述安装架上转动安装有用于遮挡其开口的盖板,所述盖板与所述移动架之间铰接有连动杆。
9、进一步地,所述驱动件包括多个环形阵列滑动安装在所述安装架上的驱动架,所述驱动架上构造有柱杆,所述盖板上构造有连接板,所述连接板一侧沿其长度方向开设有活动槽,所述柱杆滑动相切在所述活动槽内,所述安装架上安装有驱动其中一个所述驱动架移动的动力件。
10、进一步地,所述驱动架与所述安装架之间安装有复位弹簧,所述动力件包括安装在所述安装架上的驱动电机,所述驱动电机上安装有转动筒,所述转动筒内周侧构造有凸板,所述凸板的自由端构造有迫使杆,所述驱动架上构造有与所述迫使杆接触的迫使斜面。
11、进一步地,所述封堵板的数量为两个,所述封堵板的一侧对称构造有两个插接筒,用于安装连接机构的移动架上构造有两个用于插设至插接筒内的定位筒,所述插接筒外周侧圆形阵列开设有多个容置槽,所述连接机构包括转动安装在所述容置槽内的限位板,所述插接筒内周侧圆形阵列开设有多个供所述限位板插设的限位槽,安装有连接机构的移动架上安装有驱动所述限位板转动的传动组件。
12、进一步地,所述传动组件包括滑动安装在所述移动架上的滑动板,所述滑动板上对称构造有两个连接杆,两个所述连接杆分别位于两个定位筒内,所述限位板上铰接有铰接杆,所述铰接杆的自由端铰接在连接杆上,所述移动架上安装有用于驱动所述滑动板移动的电动推杆。
13、进一步地,所述运动基座上安装有两个对接机构,所述封堵板通过对接机构可拆卸式安装在运动基座上。
14、进一步地,所述对接机构包括两个安装在所述运动基座上的架体,所述架体上对称转动安装有两个卡接板,所述封堵板远离所述插接筒的一侧面上构造有两个连接块,所述连接块上开设有供所述卡接板插设的插接槽,所述架体上安装有驱动对应两个所述卡接板转动的传动件。
15、进一步地,所述传动件包括竖直滑动贯穿所述架体的接触杆,所述接触杆底部构造有安装板,所述安装板上对称铰接有两个传动杆,两个所述传动杆的自由端分别铰接在两个所述卡接板上,所述安装板与所述架体之间安装有归位弹簧,所述插接槽呈竖直条状,且长度方向两侧与所述卡接板接触。
16、本申请的有益效果如下:
17、本申请通过转环机构将对应的夹具伸出,与现有相比因为夹具事先就安装在转换机构上,所以减少了更换夹具的时间,且将泄漏的罐体放置在放置槽内后,通过连接机构使得封堵板与多轴机械手连接,以使得封堵板遮挡放置槽的开口,防止位于放置槽内的罐体内的气体继续流向仓库内,从而减小了安全事故的发生。
技术特征:
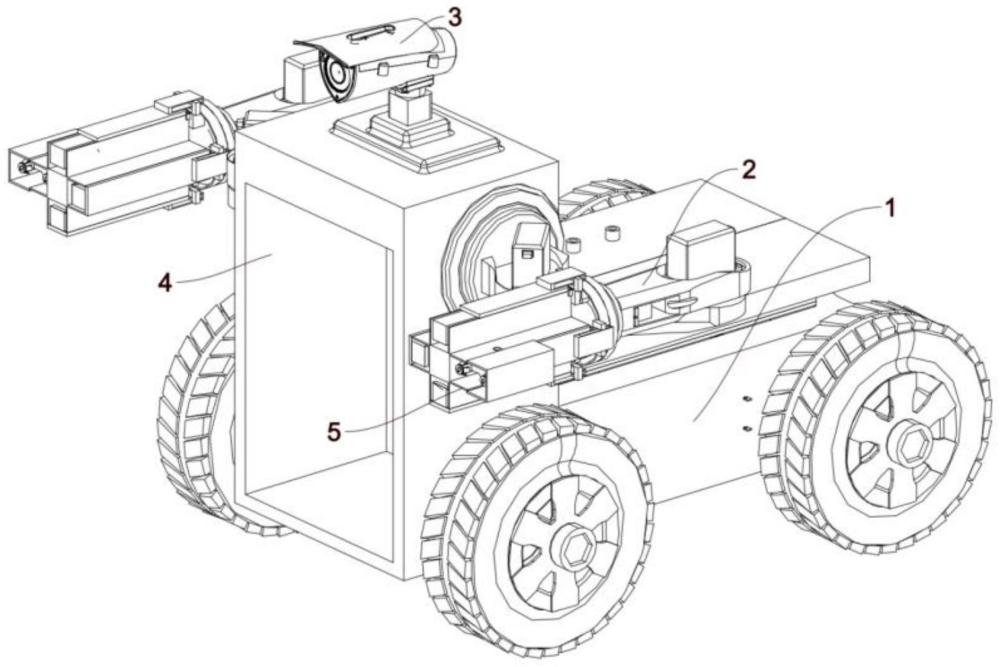
1.一种危化品搬运机器人,包括运动基座(1),一侧开设有用于放置罐体的放置槽(4),所述运动基座(1)上对称安装有两个多轴机械臂(2),所述运动基座(1)上安装有摄像头(3),其特征在于,还包括:
2.根据权利要求1所述的危化品搬运机器人,其特征在于,所述转环机构(5)包括安装在多轴机械臂(2)自由端的安装架(501),所述安装架(501)上圆形阵列构造有多个存放腔(502),所述存放腔(502)内部滑动安装有移动架(503),其用于安装连接机构(7)或夹具(6),所述安装架(501)上安装有驱动所述移动架(503)移动的驱动件(9)。
3.根据权利要求2所述的危化品搬运机器人,其特征在于,所述存放腔(502)长度方向的一侧为开口,所述安装架(501)上转动安装有用于遮挡其开口的盖板(12),所述盖板(12)与移动架(503)之间铰接有连动杆(13)。
4.根据权利要求3所述的危化品搬运机器人,其特征在于,所述驱动件(9)包括多个环形阵列滑动安装在安装架(501)上的驱动架(901),所述驱动架(901)上构造有柱杆(902),所述盖板(12)上构造有连接板(905),所述连接板(905)一侧沿其长度方向开设有活动槽(903),所述柱杆(902)滑动相切在活动槽(903)内,所述安装架(501)上安装有驱动其中一个所述驱动架(901)移动的动力件(904)。
5.根据权利要求4所述的危化品搬运机器人,其特征在于,所述驱动架(901)与安装架(501)之间安装有复位弹簧(9043),所述动力件(904)包括安装在安装架(501)上的驱动电机(9041),所述驱动电机(9041)上安装有转动筒(9042),所述转动筒(9042)内周侧构造有凸板(9044),所述凸板(9044)的自由端构造有迫使杆(9045),所述驱动架(901)上构造有与所述迫使杆(9045)接触的迫使斜面(9045)。
6.根据权利要求2所述的危化品搬运机器人,其特征在于,所述封堵板(8)的数量为两个,所述封堵板(8)的一侧对称构造有两个插接筒(701),用于安装连接机构(7)的移动架(503)上构造有两个用于插设至插接筒(701)内的定位筒(702),所述插接筒(701)外周侧圆形阵列开设有多个容置槽(703),所述连接机构(7)包括转动安装在容置槽(703)内的限位板(704),所述插接筒(701)内周侧圆形阵列开设有多个供限位板(704)插设的限位槽(705),安装有连接机构(7)的移动架(503)上安装有驱动限位板(704)转动的传动组件(706)。
7.根据权利要求6所述的危化品搬运机器人,其特征在于,所述传动组件(706)包括滑动安装在移动架(503)上的滑动板(7061),所述滑动板(7061)上对称构造有两个连接杆(7062),两个所述连接杆(7062)分别位于两个定位筒(702)内,所述限位板(704)上铰接有铰接杆(7063),所述铰接杆(7063)的自由端铰接在连接杆(7062)上,所述移动架(503)上安装有用于驱动滑动板(7061)移动的电动推杆(7063)。
8.根据权利要求6所述的危化品搬运机器人,其特征在于,所述运动基座(1)上安装有两个对接机构(10),所述封堵板(8)分别对接机构(10)可拆卸式安装在运动基座(1)上。
9.根据权利要求8所述的危化品搬运机器人,其特征在于,所述对接机构(10)包括两个安装在运动基座(1)上的架体(1001),所述架体(1001)上对称转动安装有两个卡接板(1002),所述封堵板(8)远离所述插接筒(701)的一侧面上构造有两个连接块(1003),所述连接块(1003)上开设有供所述卡接板(1002)插设的插接槽(1004),所述架体(1001)上安装有驱动对应两个卡接板(1002)转动的传动件(11)。
10.根据权利要求9所述的危化品搬运机器人,其特征在于,所述传动件(11)包括竖直滑动贯穿架体(1001)的接触杆(1101),所述接触杆(1101)底部构造有安装板(1102),所述安装板(1102)上对称铰接有两个传动杆(1103),两个所述传动杆(1103)的自由端分别铰接在两个卡接板(1002)上,所述安装板(1102)与所述架体(1001)之间安装有归位弹簧(1104),所述插接槽(1004)呈竖直条状,且长度方向两侧与所述卡接板(1002)接触。
技术总结
本申请公开了一种危化品搬运机器人,涉及机器人技术领域。本申请包括:运动基座,一侧开设有用于放置罐体的放置槽,所述运动基座上对称安装有两个多轴机械臂,所述运动基座上安装有摄像头;转环机构,安装在所述多轴机械臂自由端,所述转环机构上安装有至少两种夹具;转环机构用于控制夹具的伸出。本申请通过转环机构将对应的夹具伸出,与现有相比因为夹具事先就安装在转换机构上,所以减少了更换夹具的时间,且将泄漏的罐体放置在放置槽内后,通过连接机构使得封堵板与多轴机械手连接,以使得封堵板遮挡放置槽的开口,防止位于放置槽内的罐体内的气体继续流向仓库内,从而减小了安全事故的发生。
技术研发人员:王韵琪,丁亮亮
受保护的技术使用者:苏州市职业大学
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!