一种牙刷软胶注塑自动化生产设备及系统的制作方法
1.本发明涉牙刷软胶生产技术领域,尤其是指一种牙刷软胶注塑自动化生产设备及系统。
背景技术:
2.随着现代工业的不断发展,注塑行业也越发兴盛。在注塑机行业中包胶称为二次注塑成型,需要将注塑的原材料在模具内成型后取出,然后再放入包胶模具中从而实现二次包胶,例如;牙刷是人们日常生活中的必备品,它组成主要包括了刷毛和刷柄,在生产刷柄时常常会对牙刷的刷柄进行二次包胶。
3.目前,牙刷二次包胶的生产过程大多是人工作业。首先需要人工的将乱序的刷柄放整齐,再将刷柄通过人工放在模具内,注塑成型后人工再将包胶后的成品从模具内取出来,最后对包胶后的成品进行装箱。这样的人工作业比较繁琐的,受人为因素影响很大,效率低,产量低,不良品高,人力成本高等突出问题和缺陷。
技术实现要素:
4.为此,本发明所要解决的技术问题在于克服现有技术中的缺陷,创新设计一种牙刷软胶注塑自动化生产设备和生产方法,实现刷柄由乱序来料到整齐供料再进行二次包胶与装箱的自动化生产系统,能够代替大部分的人工作业,提高牙刷生产的产量。
5.为解决上述技术问题,本发明提供了一种牙刷软胶注塑自动化生产设备,包括:
6.供料模组,提供待包胶的刷柄;
7.包胶模组,用于对待包胶的刷柄进行包胶;
8.成品收集模组,用于收集已包胶的刷柄;
9.桁架机器人,包括支臂、与所述支臂相连的位移单元,所述位移单元带动所述支臂在所述供料模组、包胶模组、成品收集模组之间移动;
10.埋入取出模组,包括与所述支臂连接的固定件、与所述固定件连接的吸附单元;所述吸附单元用于吸附所述刷柄;其中,所述位移单元带动所述埋入取出模组移动至所述供料模组,所述埋入取出模组的吸附单元吸附所述供料模组提供的刷柄;所述位移单元带动所述埋入取出模组移动至所述包胶模组,所述吸附单元释放所述刷柄,所述包胶模组对所述刷柄进行包胶,待包胶完成后,所述吸附单元吸附刷柄;所述位移单元带动所述埋入取出模组移动至所述成品收集模组,所述吸附单元向所述成品收集模组释放所述刷柄。
11.作为本发明的一种优选方式,所述固定件还设有滑轨、驱动气缸,所述吸附单元与所述滑轨滑动连接,所述驱动气缸驱动所述吸附单元沿所述滑轨移动。
12.作为本发明的一种优选方式,所述吸附单元包括若干吸盘件,所述吸盘件阵列设于所述吸附单元,至少两个所述吸盘件吸附同一所述刷柄。
13.作为本发明的一种优选方式,所述吸附单元还包括下压件,所述下压件用于下压被所述吸盘件吸附的所述刷柄。
14.作为本发明的一种优选方式,所述吸附单元还包括仿形定位件,设于所述吸盘件的一侧,至少一部分所述刷柄的外形配合。
15.作为本发明的一种优选方式,所述移动单元包括x轴直线模组、y轴直线模组、z轴直线模组,带动所述支臂实现xyz轴移动。
16.作为本发明的一种优选方式,还包括料头取出模组,用于清理所述包胶模组内的料头。
17.作为本发明的一种优选方式,所述料头取出模组包括夹取单元,所述夹取单元用于夹持所述包胶模组内的料头。
18.作为本发明的一种优选方式,所述成品收集模组包括可拆卸的成品收集箱、检测装置,所述检测装置用于检测所述成品收集箱是否在位。
19.一种牙刷软胶注塑自动化生产系统,包括控制器与上述任一项所述的牙刷软胶注塑自动化生产设备,且所述控制器与所述牙刷软胶注塑自动化生产设备连接。
20.本发明的上述技术方案相比现有技术具有以下优点:
21.本发明所述的一种牙刷软胶注塑自动化生产设备及系统,埋入取出模组采用的是可前后滑动式结构,这样首先避免了包胶模组由于空间问题带来的干涉问题,其次避免了埋入取出模组过长可能导致的移动不方便,晃动大,定位不精准问题,刷柄埋入取出模组在取出包好软胶的刷柄后,埋入取出模组可直接通过滑动直接将取出工位切换到埋入工位,减小由于伺服移动才产生的晃动大的问题。
附图说明
22.为了使本发明的内容更容易被清楚的理解,下面根据本发明的具体实施例并结合附图,对本发明作进一步详细的说明。
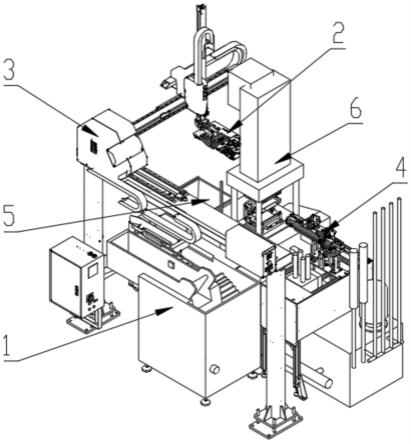
23.图1是本发明一种牙刷软胶注塑自动化生产设备的示意图。
24.图2是本发明一种牙刷软胶注塑自动化生产设备的埋入取出模组示意图。
25.图3是本发明一种牙刷软胶注塑自动化生产设备的桁架机器人示意图。
26.图4是本发明一种牙刷软胶注塑自动化生产设备的料头取出模组示意图。
27.图5是本发明一种牙刷软胶注塑自动化生产设备的成品收集模组示意图。
28.说明书附图标记说明:1、供料模组;2、埋入取出模组;3、桁架机器人;4、料头取出模组;5、成品收集模组;6、包胶模组;7、驱动气缸;8、固定件;9、移动件;10、仿形定位件;11、吸盘件;12、下压件;13、滑轨;14、电控箱;15、支撑立柱;16、x轴直线模组;17、y轴直线模组;18、z轴直线模组;19、框架;20、伺服单元;21、旋转单元;22、上下单元;23、翻转单元;24、夹取单元;25、调节单元;26、台体;27、导向机构;28、成品收集箱;29、质检槽;30、检测装置。
具体实施方式
29.下面结合附图和具体实施例对本发明作进一步说明,以使本领域的技术人员可以更好地理解本发明并能予以实施,但所举实施例不作为对本发明的限定。
30.参照图1-5所示,本发明的一种牙刷软胶注塑自动化生产设备,其特征在于,包括:供料模组1、埋入取出模组2、桁架机器人3、料头取出模组4、成品收集模组5、包胶模组6。
31.所述供料模组1用于提供待包胶的刷柄,将凌乱的刷柄排列整齐,为埋入取出模组
2进行供料。
32.参照图3所示,所述桁架机器人3的末端安装埋入取出模组2,所述埋入取出模组2随所述桁架机器人3移动。所述桁架机器人3的主要作用是将未包软胶的刷柄的骨架抓取放到包胶模组6内进行包软胶,将包好软胶的刷柄取出放入成品收集模组5内。
33.所述桁架机器人3主要包括由电控箱14、支撑立柱15、x轴直线模组16、y轴直线模组17、z轴直线模组18。桁架机器人3是用来安装埋入取出模组2,将供料模组1上摆放好的刷柄骨架取出,搬运到包胶模组6的模具内进行包软胶。在包胶完成后,所述桁架机器人3及埋入取出模组2取出包好软胶的刷柄并放入收集筐。
34.所述桁架机器人3由x轴直线模组16、y轴直线模组17、z轴直线模组18组成,所述x轴直线模组16、y轴直线模组17与z轴直线模组18采用常见的电机皮带导轨传动结构,能够使所述桁架机器人3在上下、左右、前后三个空间范围内动作,即实现xyz三向移动。
35.参照图2所示,所述埋入取出模组2用于抓取待包胶的刷柄置放入所述包胶模组6中,并将在所述包胶模组6中完成包胶的刷柄取出。
36.所述埋入取出模组2包括固定件8、设于所述固定件8上的滑轨13、与所述滑轨13滑动连接的吸附单元、驱动所述吸附单元沿所述滑轨13移动的驱动气缸7,所述吸附单元用于吸附所述刷柄。
37.所述吸附单元包括若干吸盘件11,所述吸盘件11阵列设于所述吸附单元,至少两个所述吸盘件11吸附同一所述刷柄。优选的,所述刷柄对应两个所述吸盘件11,所述吸盘件11提供负压吸附,将待包胶的所述刷柄吸附于所述吸附单元上。优选的,为提高工作效率,所述吸附单元可设有多组,至少为两组,其中一组用于吸附所述包胶模组6中已经完成包胶的刷柄,另一组用于吸附待包胶的刷柄。所述吸附单元在所述包胶模组6中的已经完成包胶的刷柄被取出后,再将吸附的待包胶的刷柄向所述包胶模组6释放。所述驱动气缸7作为所述埋入取出模组2的移动部件,在所述吸附单元组取出已包胶刷柄与释放待包胶刷柄的过程中,带动多组所述吸附单元移动,使得正在动作的吸附单元能够到达正确的工位,完成以包胶刷柄的取料与待包胶刷柄的放料。同样的,当所述吸附单元在供料模组1取料、在成品收集模组5放料时,所述驱动单元7带动多组所述吸附单元移动,使得正在动作的所述吸附单元能够到达正确的工位,完成对待包胶刷柄的取料、对已包胶刷柄的放料。
38.所述吸附单元还包括下压件12,所述下压件12用于下压被所述吸盘件11吸附的所述刷柄。所述下压件12用于将放入所述包胶模组6的模具内但未放到位的所述刷柄的骨架进行下压使其放到位。
39.所述吸附单元还包括仿形定位件10,设于所述吸盘件11的一侧,至少一部分所述刷柄的外形配合。所述仿形定位件10用于定位牙刷骨架,防止取所述待包胶的刷柄后,所述刷柄发生位置移动,导致埋入注塑机中位置不准。
40.所述埋入取出模组2具体用于取包完软胶的刷柄的时候伸出,将后段的所述刷柄的骨架伸入所述包胶模组6中埋入,然后所述移动件9收回。
41.参照图4所示,所述料头取出模组4主要包括框架19、伺服单元20、旋转单元21、上下单元22、翻转单元23、夹取单元24、调节单元25。
42.所述框架19上安装有所述调节单元25,所述调节单元25上安装有所述伺服单元20,所述伺服单元20上安装有所述旋转单元21,所述旋转单元21安装有所述上下单元22,所
述上下单元22安装有所述翻转单元23。
43.所述调节单元25用于调节安装在所述调节单元25上的机构的高度。在设备工作时,所述伺服单元20带动所述旋转单元21、上下单元22、翻转单元23动作,使所述夹取单元24进入所述包胶模组6中,所述上下单元22上升,进而所述夹取单元24将料头夹住,所述上下单元22下降,使所述夹取单元24将料头拉出,所述伺服单元20退回,所述旋转单元21动作,将料头移至放置位,所述翻转单元23翻转180度,所述夹取单元24打开,将料头丢掉,最后所述翻转单元23复位,所述旋转单元21复归。
44.参照图5所示,所述成品收集模组5包括台体26、导向机构27、成品收集箱28、质检槽29、检测装置30。所述质检槽29是方便质检员抽检时使用,所述检测装置30用于检测所述成品收集箱28有没有放到位,所述导向机构27用于放箱时的导向。
45.所述包胶模组6采用现有的立式注胶机,用于为待包胶的刷柄进行包胶。
46.在实际的生产过程中,工作流程如下:
47.s1:人工将凌乱的牙刷放置在所述供料模组1上。
48.s2:所述供料模组1将凌乱的刷柄排列整齐摆放,等待所述桁架机器人3来取。
49.s3:所述桁架机器人3在收到所述供料模组1输出的允许取料信号后,所述桁架机器人3带动所述埋入取出模组2移动,取走所述供料模组1上的刷柄。
50.s4:所述桁架机器人3取走所述供料模组1上的刷柄骨架后,对所述供料模组1发出取料完成信号,让所述供料模组1再次供料。
51.s5:所述埋入取出模组2运动到所述包胶模组6外侧的待机位,等待所述包胶模组6开模完成信号。
52.s6:所述包胶模组6在开模完成后,所述桁架机器人3沿y轴向前移动,使所述埋入取出模组2进入模具,同时所述埋入取出模组2的移动部件动作,使所述埋入取出模组2伸出,先取出包好软胶的刷柄,然后所述埋入取出模组2上的移动部件复归,继续往所述包胶模组6的模具内埋入所述刷柄的骨架,最后用所述埋入取出模组2的所述下压件12将未放到位的所述刷柄的骨架下压,使所述刷柄的骨架摆放到位。
53.s7:所述桁架机器人3退到安全位置后,所述桁架机器人3向所述包胶模组6发出允许合模信号,使所述包胶模组6对刚才埋入的所述刷柄的骨架进行包软胶。
54.s8:所述埋入取出模组2随所述桁架机器人3运动到成品放置处,将包好软胶的所述刷柄放入所述刷柄收集箱,在此之前若有质检员按动抽检按钮,则所述桁架机器人3就会将所述埋入取出模组2上包好软胶的刷柄直接放入质检槽29。
55.s9:所述埋入取出模组2随所述桁架机器人3回到所述供料模组1上方待机位置,等待所述供料模组1给出允许所述桁架机器人3取料信号。
56.s10:循环以上动作。
57.一种牙刷软胶注塑自动化生产系统,包括控制器与上述任一项所述的牙刷软胶注塑自动化生产设备,且所述控制器与所述牙刷软胶注塑自动化生产设备连接。该牙刷软胶注塑自动化生产系统可包括至少一台所述牙刷软胶注塑自动化生产设备,并配合其他机构,由所述控制器控制,共同完成刷柄包胶。
58.本发明优点在于:
59.1.埋入取出模组采用的是可前后滑动式结构,这样首先避免了包胶模组由于空间
问题带来的干涉问题,其次避免了埋入取出模组过长可能导致的移动不方便,晃动大,定位不精准问题,刷柄埋入取出模组在取出包好软胶的刷柄后,埋入取出模组可直接通过滑动直接将取出工位切换到埋入工位,减小由于伺服移动才产生的晃动大的问题。
60.2.料头取出模组采用的是伺服单元加气缸结构,这样相对于传统的取料头装置更加节省空间,在有限的空间内实现机构的使用功能性。
61.3.检测装置用于来检测物料箱位置的情况,有了检测装置不会发生因为刷柄收集箱没有放到位,导致的成品丢出收集箱外,或者撞到收集筐的边缘导致的撞伤产品。
62.显然,上述实施例仅仅是为清楚地说明所作的举例,并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引申出的显而易见的变化或变动仍处于本发明创造的保护范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1