用于允许连续条带收缩的收缩传送器的制作方法
本技术涉及一种用于允许连续条带、尤其是用于轮胎成型的轮胎部件收缩的收缩传送器。
背景技术:
1、当轮胎部件、尤其是连续条带或三角胶被挤出时,轮胎部件冷却并且需要能够缩小以允许轮胎部件的弹性材料放松。
2、图10示出了一种已知的收缩传送器,其具有沿轮胎部件的输送路径在输送方向上连续地布置的三个收缩部段。每个收缩部段包括一组辊子和用于在该组内以恒定速度旋转辊子的驱动带。对于在输送方向上的每个后续收缩部段,以低于先前收缩部段的速度驱动该组辊子,以允许支承在其上的轮胎部件缩小。
3、该已知的收缩传送器的缺点是,辊子的速度不会随着每个辊子逐渐降低。相反,速度在对应于三个收缩部段的三个阶段中降低,在从一个阶段到下一个阶段的每个过渡处具有突然的速度差。这可能导致轮胎部件的弹性体材料的不良放松。更具体地,在轮胎部件离开该已知的收缩传送器之后,在该轮胎部件中可能存在不一致、变形和/或残余的应力。
4、jph 09109226 a公开了一种具有多个辊子的可变传送设备,这些辊子沿着环形链条被拉动,该环形链条沿着头部滑轮、尾部滑轮和一个或多个中间滑轮行进。每个辊子设有渐缩部分,该渐缩部分在头部滑轮与尾部滑轮之间的环形链条的上行程中接触轨道。该轨道定位成与输送方向成倾斜角,使得当辊子沿着所述轨道在输送方向上被拉动时,辊子通过与所述轨道的接触以增加的更快的速度被驱动。
技术实现思路
1、尽管根据jph 09109226 a的可变传送设备的反向构造可以用于逐渐收缩轮胎部件,但是该构造仍然具有相当大的技术缺陷。
2、首先,所有辊子具有相同的形状,以确保它们在接触轨道和沿轨道运动时以相同的方式工作。轨道相对于输送方向的倾斜角及其线性形状决定了沿着轨道的每个位置处的辊子的速度。尽管可以调节导向件相对于输送方向的倾斜角,但导向件的线性度保持相同。因此,不存在单独调节每个辊子的速度的灵活性,即在输送方向上形成速度的非线性降低或者从线性构造改变为非线性构造。
3、其次,每个辊子的速度由所述辊子的渐缩部分与导向件之间接触部的横向位置来限定,其可以在由渐缩部分的锥度限定的范围内变化。所述范围对于每个辊子是相同的。因此,导向件相对于所述范围的定位精度,以及因此每个辊子的速度可控制的精度,对于所有辊子都是相同的。
4、第三,辊子分别沿着头部滑轮和返回滑轮进入和离开环形链条的上行程,每个滑轮具有相对较大的直径,比辊子大。这导致在可变传送设备的上游和/或下游的传送器之间有相对大的间隙。
5、最后,操作人员通常检查收缩过程,并在需要时手动调节收缩传送器上连续条带的位置。在根据jph 09109226 a的可变传送设备中,运动的环形链条、沿着环形链条的辊子的拉动以及倾斜角的轨道都存在显著的安全隐患,尤其是以对手指或手的潜在夹挤点的形式存在。
6、本实用新型的一个目的是提供一种用于允许连续条带收缩的收缩传送器,其中,可以提高收缩传送器的可调性、准确性和/或安全性。
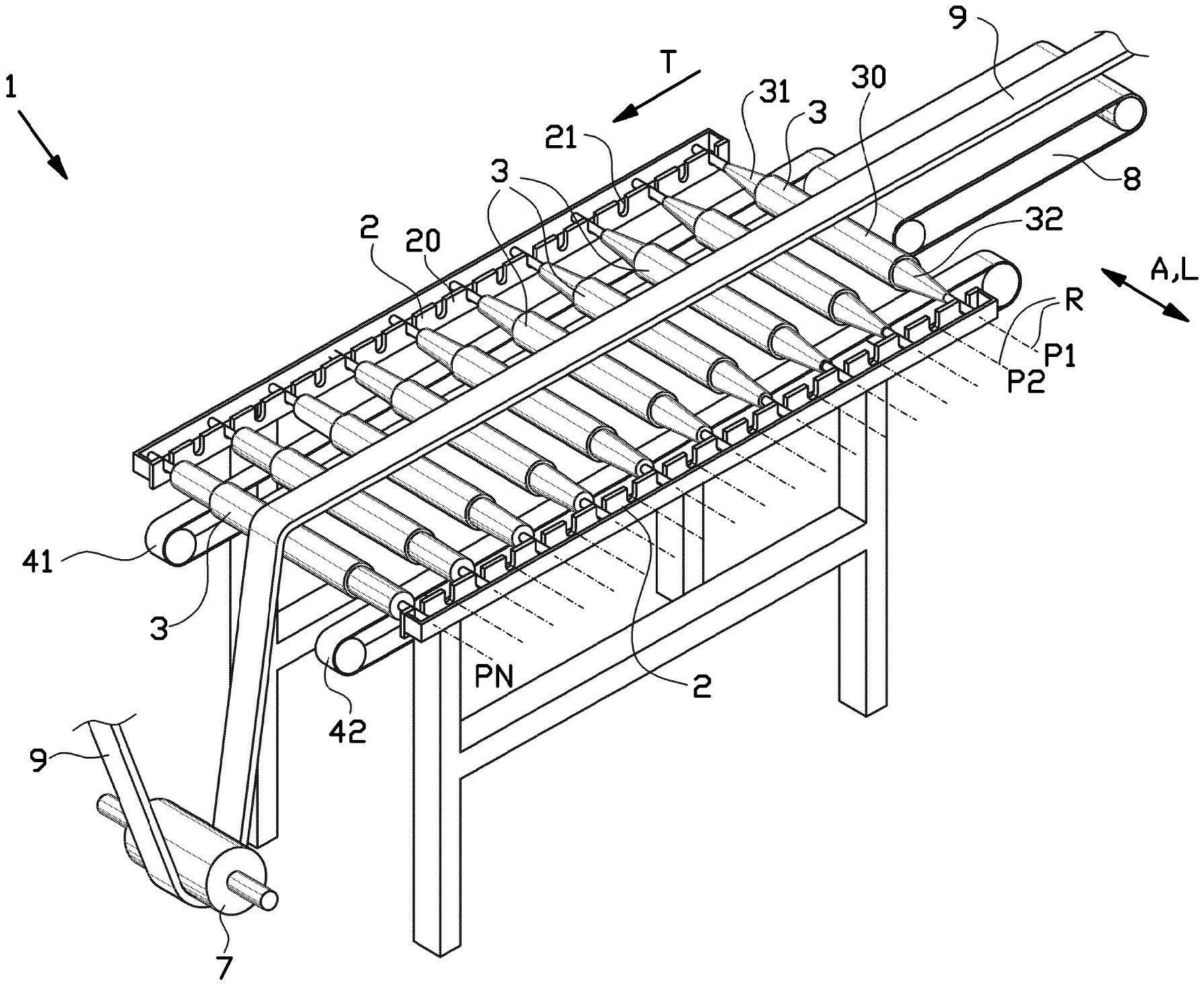
7、根据第一方面,本实用新型提供了一种用于允许连续条带收缩的收缩传送器,其中,该收缩传送器包括:多个辊子;框架,其限定了在输送方向上固定和间隔开的多个辊子位置,以将该多个辊子保持在垂直于输送方向的相互平行的定向上;以及第一驱动构件,其用于驱动该多个辊子,其中,该多个辊子中的每个辊子包括辊体和第一从动部件,该辊体可绕辊轴线旋转,该辊轴线在轴向方向上延伸,该第一从动部件与该辊轴线同轴地连接到该辊体,其中,在平行于轴向方向的剖面中的该第一从动部件具有第一驱动轮廓,其中,该多个辊子中的至少三个辊子的第一驱动轮廓渐缩,其中,该第一驱动构件布置成通过与第一从动部件接触以与第一驱动构件的速度成传动比的旋转速度旋转该多个辊子,该传动比由该第一从动部件沿着相应的第一驱动轮廓在第一驱动构件的接触位置处的直径限定,其中,该第一驱动构件可以在平行于该多个辊子的轴向方向的横向方向上的至少一个矢量分量运动,使得该第一驱动构件对于每个辊子以不同直径接触至少三个辊子中的每个辊子第一从动部件。
8、通过将辊子放置在输送方向上的固定辊子位置,可以减少和/或防止由环形链条和使辊子相对于倾斜定位的成角度轨道运动所带来的危险。此外,由于辊子不需要绕返回滑轮和头部滑轮返回,因此可以显著减小在收缩传送器与所述收缩传送器的上游或下游的传送器之间的间隙。同时,如上所述的可变传动比仍然可以提供可变控制至少三个辊子的速度的优点。
9、在一个实施例中,第一驱动轮廓对于至少三个辊子中的每个辊子以不同的渐缩率渐缩。换句话说,该至少三个辊子的各第一驱动轮廓的不同在于,每个第一驱动轮廓相对于相应的辊轴线以不同的渐缩角渐缩。通过具有不同的第一驱动轮廓的辊子,所述辊子的速度可以根据相应的第一驱动轮廓中的差异而不是驱动装置相对于所述辊子的定向来可变地控制。因此,可以防止危险的夹挤点。此外,由于可以以基本相同的方式驱动、接触或接合每个辊子,因此可以显著降低驱动辊子的复杂性。最后同样重要的是,每个第一驱动轮廓可以提供在所述辊子特定的整个范围内对辊子速度的控制或相对高水平的精度,尤其是当渐缩率相对较小时。
10、在优选实施例中,第一从动部件至少部分是锥形的,其中,至少三个辊子的各第一从动部件具有不同的锥度。通过沿着其锥形在不同位置处接合所述辊子,可以改变辊子的速度。锥度限定了速度变化的范围。较高的锥度意味着相对较宽的范围,而较低的锥度则导致相对较窄的范围。
11、在另一实施例中,对于至少三个辊子中的每个后续辊子,渐缩率在输送方向上增加或减少。因此,辊子的速度变化范围从最上游的辊子到最下游的辊子增加或减少。换句话说,在渐缩率最高的辊子处,速度变化最大,而在渐缩率最低的辊子处,速度变化最小。
12、优选地,对于至少三个辊子中的每个后续辊子,渐缩率至少部分线性地增加或减少。因此,在输送方向上的每对后续辊子之间,连续条带可以在所述辊子之间经受旋转速度的恒定变化。
13、在另一实施例中,对于至少三个辊子中的每个后续辊子,渐缩率至少部分非线性地增加或减少。渐缩率的增加或减少可根据连续条带的自然收缩行为而变化。渐缩率可以例如在收缩传送器的上游端部处更快地增加或减少,而在其下游端部处更慢地增加或减少,例如以适应收缩传送器开始时相对较高的收缩和下游减小的收缩。
14、在另一实施例中,每个第一从动部件具有最大周长和最小周长,其中,多个辊子中的所有辊子的各第一从动部件的最大周长相同。通过仅改变最小周长,当在所述最大周长处接合第一从动部件时,可以以相同的最低速度驱动所有辊子。辊子的速度可以根据最小周长与所述最大周长之间的比率而变化。替代地,每个第一从动部件具有最大周长和最小周长,其中,多个辊子中的所有辊子的各第一从动部件的最小周长相同。通过仅改变最大周长,当在所述最小周长处接合第一从动部件时,可以以相同的最高速度驱动所有辊子。
15、在另一个实施例中,对于至少三个辊子在输送方向上的的下游的多个辊子中的一个或多个辊子,第一驱动轮廓是圆柱形的。具有圆柱形的第一驱动轮廓的辊子的速度保持恒定或固定。
16、在另一个实施例中,对于多个辊子中的至少一半的每个辊子,第一驱动轮廓不同地渐缩。因此,对于至少一半的辊子,辊子的速度可以可变地调节。
17、在另一个实施例中,第一驱动构件构造成在横向方向上的所述运动期间保持平行或基本上平行于输送方向。因此,第一驱动构件可以相对于每个第一从动部件在横向方向上位移相同距离,从而根据相应的第一从动部件的第一驱动轮廓的渐缩率引起相应辊子的速度变化。
18、在替代实施例中,多个辊子中的每个辊子的第一驱动轮廓以相同的渐缩率渐缩。因此,所有辊子都可以以相同的方式设计或构造。
19、在另一个替代实施例中,第一驱动构件构造成在中立定向与偏斜定向之间旋转,在该中立定向中,第一驱动构件平行于输送方向,在该偏斜定向中,第一驱动构件与输送方向成倾斜角。倾斜角可导致第一驱动构件在至少三个辊子中的每个辊子的第一从动端部部分上的不同接触位置,以及因此不同的直径接合和/或传动比。
20、在另一实施例中,第一驱动构件包括环形带。该环形带可在第一从动部件上施加连续的摩擦以使相应的辊子旋转。
21、在另一实施例中,至少三个辊子中的每个辊子包括与辊轴线同轴地连接到辊体的第二从动部件,其中,在平行于轴向方向的剖面中的第二从动部件具有第二驱动轮廓,其中,多个辊子中的至少三个辊子的第二驱动轮廓渐缩。通过为每个辊子提供两个从动部件,可以更可靠地和/或以更平衡的方式驱动辊子。
22、优选地,对于至少三个辊子的每个辊子,第二驱动轮廓的渐缩率与该辊子的第一驱动轮廓的渐缩率相同。因此,可以通过以相同或基本上相同的方式在辊子的两个从动部件处接触、接合和/或驱动辊子来可变地控制辊子的速度。
23、在另一实施例中,对于至少三个辊子中的每个辊子,第二驱动轮廓与该辊子的第一驱动轮廓镜像对称。因此,可以在接触位置处接合或驱动两个从动部件,接触位置可以镜像对称地运动。
24、替代地,第二驱动轮廓在与第一驱动轮廓相同的方向上渐缩。因此,第一驱动构件和第二驱动构件(下文描述)可以在平行于横向方向的相同方向上运动,从而简化了用于位移所述驱动构件的装置。
25、在另一实施例中,第一从动部件和第二从动部件在所述辊体在轴向方向上的相对端部处连接到所述辊体。通过将两个从动部件设置在辊体的相对端部处,可以容易地接合、接触和/或驱动从动部件,而不会干扰连续条带在辊体上的传送。
26、在另一个实施例中,收缩传送器还包括第二驱动构件,其用于接触多个辊子的第二从动部件,并通过与所述第二从动部件的所述接触来旋转该多个辊子。第一从动部件和第二从动部件因此可以由它们自己的专用驱动构件驱动。
27、优选地,第二驱动构件可以在横向方向上的至少一个矢量分量运动。因此,驱动构件可以相对于它们应该接触、接合和/或驱动的相应从动部件运动,从而根据由所述从动部件限定的驱动轮廓改变驱动构件与相应从动部件之间的接触位置,从而改变相应辊子的速度。
28、更优选地,第一驱动构件和第二驱动构件构造成在横向方向上的所述运动期间保持相互平行或基本上相互平行。因此,第一驱动构件和第二驱动构件可以以相同的方式分别接合或接触第一从动部件和第二从动部件。
29、替代地,第一驱动构件和第二驱动构件构造成在中立定向与偏斜定向之间旋转,在该中立定向中,这些驱动构件平行于或基本上平行于输送方向,在所述偏斜定向中,这些驱动构件与输送方向成倾斜角。倾斜角可导致第一驱动构件和第二驱动构件分别在至少三个辊子中的每个辊子的第一从动端部部分和第二从动端部部分上的不同接触位置,以及因此不同的直径接合和/或传动比。
30、在另一实施例中,第一驱动构件和第二驱动构件机械地联接,以在横向方向上对称地或基本上对称地运动。因此,第一驱动构件和第二驱动构件分别相对于第一从动部件和第二从动部件在辊子的相对端部处的相对位置可以同步地改变或调节。
31、在另一个实施例中,多个辊子位置在数量上大于多个辊子。因此,在选择辊子的辊子位置时有一定的灵活性。一些辊子可以组合在一起,并且可以创建规则或不规则的辊子图案。
32、在另一个实施例中,至少三个辊子定位在多个辊子位置中的相等数量的辊子位置中,这些辊子位置在输送方向上均匀地间隔开。因此,可以沿着收缩传送器在输送方向上均匀地支承连续条带。
33、替代地,至少三个辊子定位在多个辊子位置的相等数量的辊子位置中,这些辊子位置在输送方向上不均匀地间隔开。各辊子之间的不均匀的间隔可能导致在不同位置处对连续条带施加不同的速度。此外,可以调节输送方向上每米辊子的量,以改变连续条带的支承量。具体地,辊子可以隔开更远地定位以促进成对后续辊子之间的松弛。当连续条带松弛时,收缩传送器内可容纳连续条带的更多长度。
34、在另一个实施例中,框架构造成在多个辊子位置的任何辊子位置中可互换地接纳多个辊子中的每个辊子。辊子可以方便地放置在框架中以及从框架中移除。因此,可以容易地调换或互换辊子,从而使收缩传送器高度可适配,以尽可能接近地匹配不同的连续条带的不同收缩行为。
35、在另一个实施例中,多个辊子的第一从动部件是可互换的。替代与或附加于互换辊子,第一从动部件可以互换。因此,可以针对不同的速度范围修改辊子。
36、根据未要求保护的第二方面,本实用新型提供了一种用于允许连续条带收缩的收缩传送器,其中,该收缩传送器包括:多个辊子;以及框架,其限定了在输送方向上间隔开的多个辊子位置,以将该多个辊子保持在垂直于所述输送方向的相互平行的定向上,其中,该多个辊子中的每个辊子包括辊体和第一从动部件,该辊体可绕辊轴线旋转,该辊轴线在轴向方向上延伸,该第一从动部件与辊轴线同轴地连接到所述辊体,其中,在平行于轴向方向的剖面中的第一从动部件具有第一驱动轮廓,其中,多个辊子中的至少三个辊子的第一驱动轮廓对于至少三个辊子中的每个辊子以不同的渐缩率渐缩。
37、在本说明书中所描述和所示的各种方面和特征可以尽可能地单独应用。这些单独的方面可以成为分案专利申请的主题。
- 还没有人留言评论。精彩留言会获得点赞!