伺服侧姿旋转组的制作方法
本技术属于伺服,具体涉及伺服侧姿旋转组。
背景技术:
1、伺服机械手是一种常见的工业设备,而伺服中侧姿的意思是,机械手的端部夹具可翻转90度,注塑机机械手是能够模仿人体上肢的部分功能,可以对其进行自动控制使其按照预定要求输送制品或操持工具进行生产操作的自动化生产设备。注塑机械手是为注塑生产自动化专门配备的机械,它可以在减轻繁重的体力劳动、改善劳动条件和安全生产。其中,伺服机械手上的联动轴均属于旋转组,通过多个联动轴组成的旋转组即可提高伺服机械手的灵活性。
2、现有的伺服机械手在实际使用时,其一个联动轴只能旋转一个机械臂,而伺服机械手的制作成本较高,此种方式在单一产品时还能使用,但是一旦当产品较多或是需要提高效率时,只能增加伺服机械手,极大的增加了制作成本,不利于实际操作,两个伺服机械手的同时使用还会占用空间,为此我们提出伺服侧姿旋转组。
技术实现思路
1、本实用新型的目的在于提供伺服侧姿旋转组,以解决上述背景技术中提出的现有的伺服机械手在实际使用时,其一个联动轴只能旋转一个机械臂,而伺服机械手的制作成本较高,此种方式在单一产品时还能使用,但是一旦当产品较多或是需要提高效率时,只能增加伺服机械手,极大的增加了制作成本等问题。
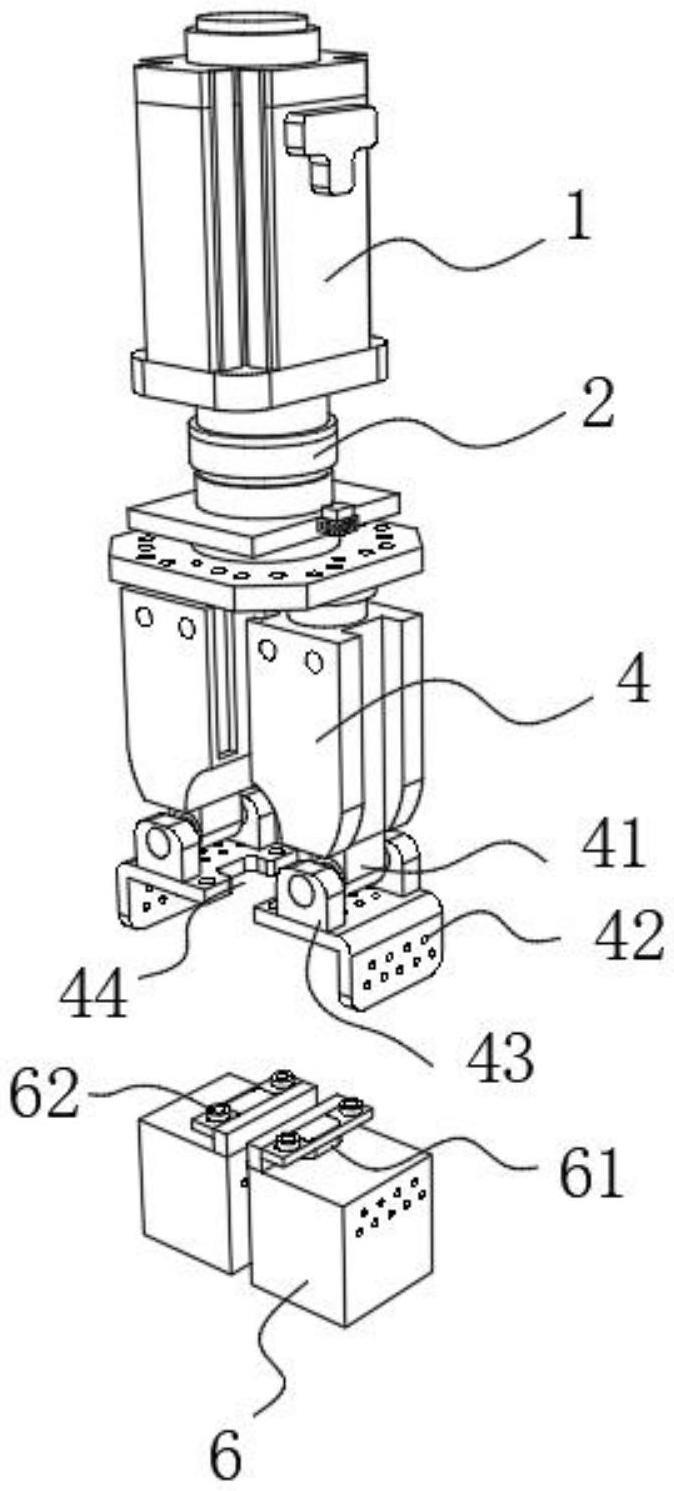
2、为实现上述目的,本实用新型提供如下技术方案:伺服侧姿旋转组,包括驱动电机,所述驱动电机的底部通过一级旋转轴转动连接有连接基板;
3、优选的,旋转组件,位于连接基板的底部,并与位于连接基板底部的二级旋转轴转动连接,所述旋转组件包括两个旋转长板,所述旋转长板的顶壁均与二级旋转轴相连接;通过两个二级旋转轴可带动旋转长板、机械手臂进行三百六十度旋转,使得其灵活性度更高,同时旋转长板与机械手臂之间也可进行旋转。
4、优选的,所述旋转长板的底部设有限位转轴,所述限位转轴的底部设有l型连接板,所述l型连接板的顶部对称设有联动侧板,且所述限位转轴与两个联动侧板转动连接,其中,l型连接板与机械手臂相连接。限位转轴与两个联动侧板进行转动,而联动侧板的端部与l型连接板为一体式连接,当联动侧板旋转时,l型连接板与机械手臂均可以限位转轴的圆心进行旋转。
5、优选的,所述机械手臂的顶部设有固定板,所述固定板的中部设有限位卡块,所述固定板的顶端对称设有两个连接螺栓。当机械手臂安装时,机械手臂顶部的固定板放置于l型连接板的顶部,所述l型连接板的中部开设有与限位卡槽配合使用的限位卡块,所述l型连接板的顶壁开设有与连接螺栓配合使用的固定孔。使得限位卡块位于限位卡槽的位置处,使得限位卡块与限位卡槽卡合连接,然后将连接螺栓与l型连接板顶部固定孔相连接,即可使得机械手臂安装固定,同时当机械手臂安装后,机械手臂可通过限位转轴、联动侧板进行二百七十度旋转。
6、优选的,所述连接基板的底壁转动连接有二级旋转轴,且所述连接基板的底部通过二级旋转轴与底座基座转动连接,所述底座基座的顶壁对称设有多个校准孔,所述连接基板的其中一个侧壁设有校准头。所述校准孔的个数为四个,且每个校准孔距离二级旋转轴圆心的距离一致。校准孔的间隔角度均为九十度,而校准头随连接基板旋转时,可通过四个校准孔确定旋转角度,增加精准性。
7、优选的,所述底座基座的长度宽度均大于连接基板的长度宽度,当校准头与底座基座侧壁处于平行状态时,校准头位于其中一个校准孔的正上方。使得连接基板无论如何旋转,均位于底座基座的顶部,连接基板的侧壁不会超出底座基座上。
8、优选的,所述l型连接板与机械手臂的侧壁均开设有多个限位圆孔,且当机械手臂与l型连接板连接后,限位圆孔处于重合状态。使得二者连接更加方便。
9、与现有技术相比,本实用新型的有益效果是:
10、底座基座的底部通过旋转组件连接有两个旋转长板,每个旋转长板均可与连接基板转动连接,使得在一个伺服机械手的端部可通过旋转组件连接有两个分支,同时旋转长板的端部均可根据需求与机械手臂连接固定,使得伺服灵活性较高,且可同时两个机械臂同时使用,进一步提高了效率,节省成本和空间。
11、连接基板与底座基座之间通过二级旋转轴转动连接,而连接基板可通过校准头、校准孔起到精准定位效果,当连接基板旋转时,校准头可通过校准孔进行校准,使得旋转组件在具体使用时精准度较高,且校准较为简单。
技术特征:
1.伺服侧姿旋转组,其特征在于:包括驱动电机(1),所述驱动电机(1)的底部通过一级旋转轴(2)转动连接有连接基板(3);
2.根据权利要求1所述的伺服侧姿旋转组,其特征在于:所述机械手臂(6)的顶部设有固定板,所述固定板的中部设有限位卡块(61),所述固定板的顶端对称设有两个连接螺栓(62)。
3.根据权利要求2所述的伺服侧姿旋转组,其特征在于:所述l型连接板(42)的中部开设有与限位卡槽(44)配合使用的限位卡块(61),所述l型连接板(42)的顶壁开设有与连接螺栓(62)配合使用的固定孔。
4.根据权利要求1所述的伺服侧姿旋转组,其特征在于:所述连接基板(3)的底壁转动连接有二级旋转轴(32),且所述连接基板(3)的底部通过二级旋转轴(32)与底座基座(33)转动连接,所述底座基座(33)的顶壁对称设有多个校准孔(34),所述连接基板(3)的其中一个侧壁设有校准头(31)。
5.根据权利要求4所述的伺服侧姿旋转组,其特征在于:所述校准孔(34)的个数为四个,且每个校准孔(34)距离二级旋转轴(32)圆心的距离一致。
6.根据权利要求4所述的伺服侧姿旋转组,其特征在于:所述底座基座(33)的长度宽度均大于连接基板(3)的长度宽度,当校准头(31)与底座基座(33)侧壁处于平行状态时,校准头(31)位于其中一个校准孔(34)的正上方。
7.根据权利要求1所述的伺服侧姿旋转组,其特征在于:所述l型连接板(42)与机械手臂(6)的侧壁均开设有多个限位圆孔,且当机械手臂(6)与l型连接板(42)连接后,限位圆孔处于重合状态。
技术总结
本技术属于伺服技术领域,公开了伺服侧姿旋转组,包括驱动电机,所述驱动电机的底部通过一级旋转轴转动连接有连接基板;旋转组件,位于连接基板的底部,并与位于连接基板底部的二级旋转轴转动连接,所述旋转组件包括两个旋转长板,所述旋转长板的顶壁均与二级旋转轴相连接;通过两个二级旋转轴可带动旋转长板、机械手臂进行三百六十度旋转,使得其灵活性度更高;底座基座的底部通过旋转组件连接有两个旋转长板,每个旋转长板均可与连接基板转动连接,使得在一个伺服机械手的端部可通过旋转组件连接有两个分支,同时旋转长板的端部均可根据需求与机械手臂连接固定,使得伺服灵活性较高。
技术研发人员:郑之勇,丁义
受保护的技术使用者:东莞市汉萨自动化设备科技有限公司
技术研发日:20221024
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!