一种炉排式垃圾焚烧炉控制系统的制作方法
1.本发明涉及垃圾焚烧技术领域,特别是涉及一种炉排式垃圾焚烧炉控制系统。
背景技术:
2.随着经济的发展,城市化程度越来越高,生活垃圾产生量迅速增加,为了尽快实现生活垃圾的资源化、无害化和减量化,国家对垃圾焚烧行业进行了大量补贴;随着全国垃圾焚烧发电厂数量的增加和垃圾处理总量的提高,国家逐步以减少补贴和提高垃圾电厂烟气等污染物排放标准的方式,促进垃圾焚烧发电厂提高其运行水平和运营效率。
3.目前大多数垃圾焚烧发电厂都是采用运行人员手动调控的方式来维持各个系统的运行,这种方式耗费人力,且调控品质依赖于运行人员的操作水平,运行效率往往不高,因此亟需垃圾焚烧炉自动燃烧控制系统(acc)来提高自动化程度和运行效率。
4.申请号为201910406450.3的中国专利公开了一种多驱动逆推式垃圾焚烧炉acc控制方法及系统,其系统介绍了根据各段风压和温度计算各段料层厚度和燃烧位置的方法,通过料层厚度和燃烧位置调整炉排速度;通过对风量测定值的滤波改善了风机pid的控制效果,但没有涉及到具体的滤波算法、风机对负荷变化的调整策略以及给料的控制方法。
5.申请号为201410116017.3的中国专利公开了一种城市生活垃圾焚烧炉自动燃烧控制系统,其系统介绍了根据蒸汽量反推垃圾热值的方法,根据热值变化调整垃圾入炉量和风量,根据负荷需求调整炉排运动速度和一二次风的配风大小,但该方法仅用到pid控制器和简单的顺控程序,在工况变化剧烈或者负荷波动较大的时候难以满足控制需求。
6.申请号为201310175293.2的中国专利公开了一种生活垃圾焚烧炉自动燃烧蒸汽流量控制系统,其采用手动设置目标负荷、垃圾热值以及密度的方法,结合热量平衡和物料平衡来推导出空气量、各段炉排配风比例以及速度,以应对负荷变化较大的工况,但该方法仍需依靠运行人员的丰富经验和大量人工操作来设置参数。
7.与此同时,现有的垃圾焚烧炉自动燃烧控制系统(acc)还存在以下问题:1、垃圾焚烧炉acc系统通常与生产现场的dcs系统或plc系统耦合,存在较大的部署难度和运行风险;2、垃圾热值极其不稳定,且运行工况变化范围较大,单一的控制技术在工况变化较大的情况下无法快速响应或容易发生超调行为;此外,同一种型号的垃圾焚烧炉因使用年限、操作习惯以及运行标准的不同,其运行特性往往差异较大,同一套acc系统无法适应不同的设备;3、一些acc系统运行时与人的干预动作无法兼容,需要停止acc后才能手动干预;4、一些acc系统仅对部分反馈数据进行了简单的滤波,未能从反馈数据中获取有效的信息;5、部分炉排式垃圾焚烧炉设有翻动和滑动炉排,当前,翻动和滑动炉排只能依靠plc系统或dcs系统的顺控程序做出既定动作,无法针对特殊工况进行调节,也就无法很好地应对频繁变化的工况。
技术实现要素:
8.为了解决以上技术问题,本发明提供一种炉排式垃圾焚烧炉控制系统,包括焚烧
炉设备,还包括相互通讯连接的主控制系统和从控制系统,主控制系统包括若干独立的基于模型的控制器,主控制系统,安装于上位机内,用于根据通讯协议在从控制系统中获取垃圾焚烧炉运行的实时数据,各个基于模型的控制器对实时数据进行运算后,将运算结果通讯给从控制系统中的控制位点,以修改从控制系统中控制程序的参数;从控制系统,用于根据修改后的参数对焚烧炉设备发出执行指令;基于模型的控制器包括模块库、若干反馈数据模块以及若干输出数据模块,反馈数据模块,通讯连接于子功能模块的输入端,用于通过通讯协议在从控制系统中获取实时反馈数据;输出数据模块,连接于子功能模块的输出端,用于将对应子功能模块的运算结果通过通讯协议写入到从控制系统的参数位点;模块库,包括若干分别具有不同功能的子功能模块,分别为:循迹增量运算模块,用于根据索引值从预先定义的输出序列中查询输出值;汽包压力变化趋势运算模块,用于滤除原始数据的高频噪音;风室压力滤波算法模块,用于滤除无效的风室压力数据以及推算料层的厚度;主蒸汽流量滤波及趋势判断算法模块,用于滤除主蒸汽流量过程值的高频噪音以及对主蒸汽流量的升降进行判断;主蒸汽流量工况判断算法模块,用于判断主蒸汽流量是否在正常允许的区间内波动;主蒸汽流量控制算法模块,用于根据主蒸汽流量和汽包压力的变化趋势以及速度来调节主燃区风机开度大小和炉排动作频率;给料炉排控制算法模块,用于调节给料炉排速度;控制器写值动作兼容算法模块,用于判断运行人员是否对控制对象进行了干预。
9.本发明进一步限定的技术方案是:进一步的,基于模型的控制器的创建方法包括以下步骤s1、创建控制器页面,该页面用于放置具有不同功能的子功能模块和用于连接各模块的数据连接线;s2、通过鼠标拖拽的方式从模块库中将子功能模块拖拽到控制器页面中;s3、用数据连接线连接各个模块,数据连接线的起始端口表示从所连接的模块中获取对应变量的数据,数据连接线的末端端口表示将上述获取的对应变量的数据传输给末端所连接的模块的对应变量;s4、设置控制器的运算步长,运算步长表示控制器执行的时间间隔,每间隔一个运算步长,所有的模块按照数据连接线连接的顺序依次执行一次;s5、调试运行。
10.前所述的一种炉排式垃圾焚烧炉控制系统,循迹增量运算模块的算法包括以下步骤a1、根据数据传输线传入循迹增量运算模块的输入变量,判断该模块是否满足执行条件,如果不满足,则执行下一步骤;如果满足,则执行步骤a4;a2、检查循迹增量运算模块内置的计时器是否处于关闭状态,如果未处于关闭状
态则关闭计时器,并将序列索引值置为0;a3、在当前运算步长内,输出0,接着执行步骤a7;a4、启动计时器,如果计时器未启动则启动计时器,如果已启动则忽略开启计时器的动作,并判断计时器是否到时,如果到时,则执行步骤下一步骤;如果没有,则执行步骤a3;a5、将序列索引值自增1,如果自增后的序列索引值大于序列长度,则将序列索引值置为0,否则执行下一步骤;a6、根据自增后的序列索引值从序列表中查询对应的数值,将其作为循迹增量运算模块的输出值;a7、结束本次运算步长内的循迹增量运算模块的运算,继续执行其他子功能模块。
11.前所述的一种炉排式垃圾焚烧炉控制系统,汽包压力变化趋势运算模块的算法包括以下步骤b1、在每个运算步长内,汽包压力变化趋势运算模块均获得一个新的汽包压力实时值;b2、将汽包压力实时值加入长度为n的第一队列中;b3、同时将汽包压力实时值延迟m个时间单位后,加入长度为n的第二队列中,且一个时间单位等于一个运算步长;b4、分别计算第一队列中所有元素的平均值fm1、第二队列中所有元素的平均值fm2以及两平均值的差值defm,其中defm=fm1-fm2,且将差值defm作为汽包压力的变化速度进行输出;b5、将平均值fm1加入长度为k的第三队列中,并计算第三队列的方差devi;b6、将方差devi加入长度为6的第四队列中,并计算第四队列的所有元素中大于设定值threshold的个数count2;b7、将差值defm加入长度为6的第五队列中,并计算第五队列的所有元素中大于0的个数count1;b8、判断count2是否大于3,如果大于,则执行下一步骤;如果不大于,则输出“汽包压力不变”,在实际运算过程中用数字0表示;b9、判断count1是否大于3,如果大于,则输出“汽包压力增加”,在实际运算过程中用数字1表示;如果不大于,则输出“汽包压力下降”,在实际运算过程中用数字-1表示。
12.前所述的一种炉排式垃圾焚烧炉控制系统,风室压力滤波算法模块的算法包括以下步骤c1、设定炉膛正常负压区间设定值,实时获取风室压力数据、炉膛负压实时值以及燃尽段滑动炉排的滑动信号;c2、第一次执行风室压力滤波算法模块时,初始化与一个长度为n的队列q,并用第一个数据充满队列q;c3、在每个运算步长内,判断炉膛负压实时值是否在炉膛正常负压区间设定值内,同时判断燃尽段滑动炉排是否发出滑动信号,如果炉膛负压实时值在炉膛正常负压区间设定值内的同时,燃尽段滑动炉排也未发出滑动信号,则执行下一步骤;否则执行步骤c5;c4、将新的风室压力数据加入队列q的队尾,并移除队首的数据,接着执行步骤c6;
c5、丢弃当前风室压力数据,维持队列q不变;c6、计算队列q的均值,且将该均值作为风室压力滤波算法模块的输出值进行输出。
13.前所述的一种炉排式垃圾焚烧炉控制系统,主蒸汽流量滤波及趋势判断算法模块的算法包括以下步骤d1、获取主蒸汽流量实时值,并将该实时值加入队列q1中;d2、计算队列q1的均值,且将该均值作为滤波后的主蒸汽流量进行输出;d3、判断计时器是否到时,如果否,则保留上一次主蒸汽流量的变化趋势;如果是,则执行下一步骤;d4、分别计算队列q1中前一半所有元素的平均值fm1、后一半所有元素的平均值fm2以及主蒸汽流量变化趋势trend,其中trend=fm2-fm1;d5、判断主蒸汽流量变化趋势trend是否大于等于0,如果是,则输出“主蒸汽流量升高”;如果否,则输出“主蒸汽流量降低”。
14.前所述的一种炉排式垃圾焚烧炉控制系统,主蒸汽流量工况判断算法模块的算法包括以下步骤e1、设定主蒸汽流量设定值fset;e2、将滤波后的主蒸汽流量加入缓存队列q2;e3、计算缓存队列q2的所有元素中高于主蒸汽流量设定值fset的个数count1和低于主蒸汽流量设定值fset的个数count2;e4、分别将count1和count2与阈值threshold进行比较,当count1和count2均不大于阈值threshold时,输出“主蒸汽流量正常”;当仅有count1大于阈值threshold时,输出“主蒸汽流量较长时间内偏高”;当仅有count2大于阈值threshold时,输出“主蒸汽流量较长时间内偏低”。
15.前所述的一种炉排式垃圾焚烧炉控制系统,主蒸汽流量控制算法模块的算法包括以下步骤f1、通过主蒸汽流量工况判断算法模块获得主蒸汽流量工况,如果输出为“主蒸汽流量较长时间内偏低”,则执行下一步骤;如果输出为“主蒸汽流量较长时间内偏高”,则执行步骤f3;如果输出为“主蒸汽流量正常”,则执行步骤f4;f2、通过循迹增量运算模块获得风机增量dfan,为正增量,同时提高主燃区翻动炉排的翻动频率,接着执行步骤f6;f3、通过循迹增量运算模块获得风机增量dfan,为负增量,同时停止主燃区翻动炉排的翻动动作,接着执行步骤f6;f4、通过汽包压力变化趋势运算模块获得汽包压力的变化趋势pt,判断变化趋势pt是否为“汽包压力不变”,如果是,则输出0增量,风机增量dfan=0,接着执行步骤f6;如果不是,则执行下一步骤;f5、通过汽包压力变化趋势运算模块获得汽包压力的变化速度pv,且根据此变化速度pv计算风机增量dfan,dfan=-k*pv+b其中,k和b均为系数,pv表示汽包压力的变化速度;
f6、根据风机增量dfan调节主燃区风机的开度大小。
16.前所述的一种炉排式垃圾焚烧炉控制系统,给料炉排控制算法模块的算法包括以下步骤g1、实时获取焚烧炉排速度的反馈值,根据给料炉排速度与焚烧炉排速度之间比值的经验系数,计算给料炉排速度的约束上下限,给料炉排速度上限=焚烧炉排速度/a给料炉排速度下限=焚烧炉排速度/b其中,a和b均为经验系数;g2、根据标准料层厚度下,一单元风机的开度与一单元风室压力的经验值,获得当前风机开度下的正常风压区间;g3、通过风室压力滤波算法模块计算一单元风室压力,并判断此风室压力是否处于正常风压区间内,如果是,则输出0增量;如果不是,则执行下一步骤;g4、判断风室压力是高于正常风压区间还是低于正常风压区间,如果高于,则通过循迹增量运算模块计算负增量;如果低于,则通过循迹增量运算模块计算正增量;g5、根据增量和料炉排速度的约束上下限,计算新的给料炉排速度;g6、将给料炉排速度调节为新的给料炉排速度。
17.前所述的一种炉排式垃圾焚烧炉控制系统,控制器写值动作兼容算法模块的算法包括以下步骤h1、在上一个运算步长结束时,将基于模型的控制器的计算输出值保存至缓存值vc中,vc表示主控制器对被控对象的控制动作的记录;h2、当下一个运算步长开始时,判断计时器是否已经启动,如果是,则执行下一步骤;如果否,则执行步骤h6;h3、判断计时器是否到时,如果是,则执行下一步骤;如果否,则执行步骤h5;h4、关闭计时器,接着执行步骤h9;h5、对计时器进行自增运算,并将此时的反馈值vr(n)保存至缓存值vc,vc= vr(n),接着执行步骤h9;h6、判断当前写值位点的反馈值vr(n)与缓存值vc是否相等,vr(n)表示运算步开始时,读取的写值位点的值,即反馈值;如果相等,则执行步骤h8;如果不相等,则执行下一步骤;h7、启动计时器,接着执行步骤h9;h8、将基于模型的控制器的运算结果vr(n+1)输出到写值位点中,同时将该值保存至缓存值vc中;h9、结束本轮计算。
18.本发明的有益效果是:(1)本发明中,通过设置dcs系统或plc系统和基于模型的控制器,基于模型的控制器包括模块库、若干反馈数据模块以及若干输出数据模块,模块库中设置有若干具有不同功能的子功能模块,从而使得主控制系统不直接与焚烧炉设备进行数据交互,而是仿照运行人员通过调整dcs系统或者plc系统参数的方式来实现垃圾焚烧炉的智能控制,鉴于dcs系统或者plc系统对参数设定值已经设计了充分的逻辑保护,主控制系统控制程序的运行
风险大大降低;(2)本发明中,基于模型的控制器的设计方法设计灵活、扩展性强、部署和调试周期短,模块库中所包含的各个子功能模块通用性强,可作为更复杂控制器的底层模块,以适应更复杂的工况;(3)本发明中,包含多个基于模型的控制器的主控制系统属于外挂式系统,具有更高的安全性和实用性;(4)本发明中,包含多个基于模型的控制器的主控制系统充分利用垃圾焚烧电厂原有的设备和数据,不需要额外添加新的设备或测量仪器,也不需要停炉安装,因此硬件成本低,对实际生产运行的影响较小。
附图说明
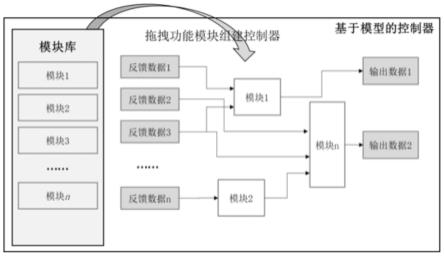
19.图1为本发明实施例中炉排式垃圾焚烧炉控制系统的功能框图;图2为本发明实施例中基于模型的控制器的创建流程图;图3为本发明实施例中基于模型的控制器的界面示意图;图4为本发明实施例中循迹增量运算模块的算法流程图;图5为本发明实施例中汽包压力变化趋势运算模块的算法流程图;图6为本发明实施例中风室压力滤波算法模块的算法流程图;图7为本发明实施例中主蒸汽流量滤波及趋势判断算法模块的算法流程图;图8为本发明实施例中主蒸汽流量工况判断算法模块的算法流程图;图9为本发明实施例中主蒸汽流量控制算法模块的算法流程图;图10为本发明实施例中给料炉排控制算法模块的算法流程图;图11为本发明实施例中控制器写值动作兼容算法模块的算法流程图。
具体实施方式
20.本实施例提供的一种炉排式垃圾焚烧炉控制系统,包括焚烧炉设备、主控制系统以及从控制系统,焚烧炉设备包括给料小车、滑动/翻动炉排、一次风机以及二次风机;主控制系统以软件通讯的方式与从控制系统进行数据的读写,主控制系统包括若干独立的基于模型的控制器,从控制系统设置为dcs系统或者plc系统。
21.如图1所示,位于上位机中的主控制系统根据通信协议,从dcs系统或plc系统中获取垃圾焚烧炉运行的实时数据,主控制系统中各个基于模型的控制器获得这些反馈数据后,经运算将运算结果通讯给dcs系统或plc系统中的控制位点,从而修改dcs系统或plc系统中控制程序的参数;dcs系统或plc系统原有的控制程序会根据新设定的参数对焚烧炉的具体设备发出执行指令。
22.因此,本发明所设计的主控制系统不直接与焚烧炉设备进行数据交互,而是仿照运行人员通过调整dcs系统或者plc系统参数的方式来实现垃圾焚烧炉的智能控制,鉴于dcs系统或者plc系统对参数设定值已经设计了充分的逻辑保护,主控制系统控制程序的运行风险大大降低。
23.主控制系统包括若干独立的基于模型的控制器,基于模型的控制器包括模块库、若干反馈数据模块以及若干输出数据模块,
反馈数据模块,通讯连接于子功能模块的输入端,用于通过通讯协议在从控制系统中获取实时反馈数据;输出数据模块,连接于子功能模块的输出端,用于将对应子功能模块的运算结果通过通讯协议写入到从控制系统的参数位点;模块库,包括若干分别具有不同功能的子功能模块,分别为:循迹增量运算模块,用于根据索引值从预先定义的输出序列中查询输出值;汽包压力变化趋势运算模块,用于滤除原始数据的高频噪音;风室压力滤波算法模块,用于滤除无效的风室压力数据以及推算料层的厚度;主蒸汽流量滤波及趋势判断算法模块,用于滤除主蒸汽流量过程值的高频噪音以及对主蒸汽流量的升降进行判断;主蒸汽流量工况判断算法模块,用于判断主蒸汽流量是否在正常允许的区间内波动;主蒸汽流量控制算法模块,用于根据主蒸汽流量和汽包压力的变化趋势以及速度来调节主燃区风机开度大小和炉排动作频率;给料炉排控制算法模块,用于调节给料炉排速度;控制器写值动作兼容算法模块,用于判断运行人员是否对控制对象进行了干预。
24.如图2和图3所示,创建一个典型的基于模型的控制器包括以下步骤s1、创建控制器页面,该页面用于放置具有不同功能的子功能模块和用于连接各模块的数据连接线;s2、通过鼠标拖拽的方式从模块库中将子功能模块拖拽到控制器页面中;s3、用数据连接线连接各个模块,不同子功能模块的组合能够灵活构建功能丰富的控制器,数据连接线的起始端口表示从所连接的模块中获取对应变量的数据,数据连接线的末端端口表示将上述获取的对应变量的数据传输给末端所连接的模块的对应变量;s4、设置控制器的运算步长,运算步长表示控制器执行的时间间隔,每间隔一个运算步长,所有的模块按照数据连接线连接的顺序依次执行一次;s5、调试运行。
25.其中,反馈数据模块通过通讯协议从dcs系统或plc系统中获取实时反馈数据,而输出数据模块则将前一个模块的运算结果通过通讯协议写入到dcs系统或plc系统的参数位点,根据步骤s1至步骤s5构建的控制器模型能够实现对垃圾焚烧炉的实时监控。
26.模块库中包含循迹增量运算模块,该算法模块作为模块库中的其中一个子功能模块,可以用于构建功能复杂的控制器模型,该模块的核心功能是根据索引值从预先定义的输出序列中查询输出值,而索引值的变化则由一个计时器来控制,每当计时器计时结束,序列的索引自增1,这样就可以按照设定的序列和计时器周期输出序列中的值,计时器的时间单位等于控制器的运算步长。
27.如图4所示,循迹增量运算模块的具体算法为:首先根据数据连接线传入该模块的输入变量,判断该模块是否满足执行条件,如果不满足,则检查模块内置计时器是否处于关闭状态,如果没有关闭则关闭计时器,并将序列索引值置为0,在当前计算步长内,输出0,并结束本次运算步长内的模块运算,继续执行控制器其他模块;如果模块满足执行条件,则启动计时器(如果计时器已经启动,则忽略开启计时器的动作),并判断计时器是否到时,如果
没有,则输出0,结束本次运算步长内的模块运算;如果计时器到时,则将索引值自增1(如果自增后的索引值大于序列长度,则将索引值置为0),并根据索引值从序列表中查询对应的数值,将其作为该模块的输出值,结束本次运算步长内的模块运算;循迹增量运算模块是一个最小的运算单元,通常将它作为if else条件执行模块的子模块,例如:if满足条件(即“判断该模块是否满足执行条件”中的“执行条件”)then循迹增量运算模块。
28.模块库中包含汽包压力变化趋势运算模块,该模块相较于简单的差分运算,能够有效滤除原始数据的高频噪音,从而提供准确的数据变化趋势判断,该模块的核心功能是采用均值滤波、方差运算和阈值判断来输出汽包压力“汽包压力不变”、“汽包压力增加”以及“汽包压力下降”三种状态,并将其作为其他模块的输入参数。
29.该模块内置了多个缓存队列,用于保存模块的输入数据和中间变量,在每个运算周期内,缓存队列都会将新的值添加到队列尾部,并移除队列首部的数据。
30.如图5所示,汽包压力变化趋势运算模块的具体算法为:在控制器的每个运算步长内,该模块获得一个新的汽包压力实时值,并将该值加入长度为n的第一队列中,同时将该值延迟m个时间单位后(1个时间单位等于1个运算步长),加入长度为n的第二队列中;然后分别计算第一队列和第二队列所有元素的平均值fm1、fm2以及它们的差值defm(defm等于fm1减去fm2);接着将fm1加入长度为k的第三队列中,并计算第三队列的方差devi,接着将devi加入长度为6的第四队列中,并判断第四队列中的所有元素中大于设定值threshold的个数count2,将defm加入长度为6的第五队列中,并判断第五队列中的所有元素中大于0的个数count1。如果count2小于等于3,则输出“汽包压力不变”,如果count2大于3,则继续判断count1是否大于3,如果大于,则输出“汽包压力增加”,否则输出“汽包压力下降”。在实际运算过程中,“汽包压力不变”用数字0表示,“汽包压力增加”用数字1表示,“汽包压力下降”用数字-1表示,同时,将defm作为汽包压力的变化速度。
31.模块库中包含风室压力滤波算法模块,在垃圾焚烧炉的运行过程中,引风机或一次风机的突变会造成风室压力的剧烈波动,此外,高温的灰渣落入扎坑时,产生的大量水蒸气也会对风室压力造成巨大的波动,从而导致风室压力的过程数据不可靠,也就无法推算出准确的料层厚度,而风室压力滤波算法模块能够有效滤除无效的风室压力数据,获得较为精确的风室压力数据,并用于料层厚度的推算。
32.如图6所示,风室压力滤波算法模块的具体算法为:当第一次执行该模块的时候,初始化一个长度为n的队列q,并用第一个数据充满该队列;然后,在每个运算步长内,判断炉膛负压是否在正常范围区间内(正常范围区间由运行人员的经验确定),同时判断燃尽段滑动炉排是否发出滑动信号,如果炉膛负压处于正常区间,并且燃尽段滑动炉排没有发出滑动信号,则将新的风室压力数据加入队列q的队尾,并移除队首的数据,并输出队列q的均值作为该模块的输出值;如果炉膛负压没有处于正常区间,或者燃尽段滑动炉排发出滑动信号,则丢弃当前风压数据,维持队列q不变,并输出队列q的均值作为该模块的输出值。
33.模块库中包含主蒸汽流量滤波及趋势判断算法模块,如图7所示,在实际生产过程中,主蒸汽流量的过程值高频噪音较大,往往无法直接充当控制器的反馈数据,该模块采用均值滤波算法获得主蒸汽流量的滚动均值,充当控制器的反馈值;同时,采用一个计时器,
定时计算主蒸汽流量缓存队列中,后半段均值与前半段均值的差,并将其作为指示主蒸汽流量变化趋势的依据,如果这个差值大于等于0,则输出“主蒸汽流量升高”,否则输出“主蒸汽流量降低”。
34.模块库中包含主蒸汽流量工况判断算法模块,该模块的作用是判断主蒸汽流量是否在正常允许的区间内波动,如图8所示,其具体算法为:将滤波后的主蒸汽流量加入缓存队列q2,计算缓存队列q2中所有元素中高于主蒸汽流量设定值的个数count1和低于主蒸汽流量设定值的个数count2,如果count1和count2均未超过阈值threshold,则输出“主蒸汽流量正常”,如果count1超过阈值threshold,则输出“主蒸汽流量较长时间内偏高”,如果count2超过阈值threshold,则输出“主蒸汽流量较长时间内偏低”。
35.模块库中包含主蒸汽流量控制算法模块,在垃圾焚烧炉运行过程中,主燃区一次风机的开度大小对主蒸汽流量起到直接调节作用,同时,翻动炉排的动作频率也能在短时间内调节炉排上的垃圾与空气的接触情况,也是短时间内调节主蒸汽流量的常用手段之一,而主蒸汽流量控制算法模块的核心功能就是根据主蒸汽流量和汽包压力的变化趋势以及速度来调节主燃区风机开度大小和炉排动作频率。
36.如图9所示,主蒸汽流量控制算法模块的具体算法为:由主蒸汽流量工况判断算法模块获得主蒸汽流量工况,如果主蒸汽流量较长时间内主蒸汽流量偏高,则通过循迹增量运算模块获得风机增量(负增量),同时停止主燃区翻动炉排翻动动作;如果主蒸汽流量较长时间内主蒸汽流量偏低,则通过循迹增量运算模块获得风机增量(正增量),同时提高主燃区翻动炉排翻动频率;如果主蒸汽流量正常,则通过汽包压力变化趋势运算模块所获得的汽包压力的变化趋势,来计算风机增量,这是因为汽包压力的变化趋势能够更早地指示主蒸汽流量的变化趋势,据此可以提前对燃烧工况进行调节;当汽包压力变化趋势为“汽包压力不变”时,输出0增量;否则,根据汽包压力变化速度计算风机增量dfan(dfan=-k*pv+b,k和b均为系数,pv表示汽包压力变化速度,由汽包压力变化趋势运算模块计算得出)。
37.模块库中包含给料炉排控制算法模块,如图10所示,其具体算法为:根据给料炉排速度与焚烧炉排速度之间比值的经验系数(该经验系数取决于垃圾焚烧炉的结构特性、设计负荷、常用垃圾特性以及焚烧炉运营要求,在绝大多数情况下,此经验系数在2~5之间),以及焚烧炉排速度的反馈值,计算给料炉排速度的约束上下限;焚烧炉从上至下呈阶梯状设置,入炉垃圾从最上面的一单元开始依次经过一单元至五单元,根据标准料层厚度下,一单元风机的开度与一单元风室压力的经验值(由于焚烧炉具有不同容量的,垃圾特性以及运行工况也不尽相同,此经验值通常在200-300pa之间),获得当前风机开度下的正常风压区间;通过风室压力滤波算法模块计算一单元风室压力,如果风室压力处于正常区间内,则输出0增量;如果风室压力偏高,则采用循迹增量运算模块计算负增量;如果风室压力偏低,则采用循迹增量运算模块计算正增量;然后,根据上述步骤获得的增量和给料速度约束上下限,计算新的给料炉排速度,并调节给料炉排速度,计算公式如下,newfeed = feedpv + dfeed如果newfeed》feedmaxnewfeed=feedmax如果newfeed 《feedminnewfeed= feedmin
其中,dfeed表示增量,feedmax和feedmin分别表示约束,feedpv表示原来的给料速度, newfeed表示新的给料速度。
38.模块库中包含控制器写值动作兼容算法模块,该模块的核心功能是判断运行人员是否对控制对象(写值位点)进行了干预,如果发生了干预,则控制器自动休眠一定时间后再次接管控制。
39.在分布式控制系统中(dcs控制系统,即本文中的从控制器),运行人员通过键鼠等外设修改被控对象的参数,从而实现远程对设备的控制(例如风机或阀门开度),这些被控对象的参数保存在从控制器的一个个位点中,称之为写值位点。
40.主控制器通过将计算出来的值写入写值位点中,从而间接实现对被控对象的控制;与此同时,操作人员也同样拥有对被控对象的控制权,为了区分一个控制动作是操作人员发出的,还是主控制器发出的,本发明设计了控制器写值动作兼容算法模块,并且为了体现操作人员相对较高的优先级,该模块延缓了对操作人员动作指令(也就是写值位点的值)的覆盖;延缓动作的实现由一个计时器实现;区分指令的来源,由缓存输出值与最新的位点实时值的对比实现。
41.如图11所示,控制器写值动作兼容算法模块的具体算法为:该模块在上一个运算步长结束时,将基于模型的控制器的计算输出值保存至缓存值vc中,vc表示主控制器对被控对象的控制动作的记录;当下一个运算步长开始时,判断计时器是否启动,如果没有启动,判断当前写值位点的反馈值vr(n)与缓存值vc是否相等,vr(n)表示运算步开始时,读取的写值位点的值,即反馈值,如果相等则说明没有发生人为干预,并将控制器运算结果输出;如果不相等,则说明发生了人为干预,则启动计时器,并结束本轮运算;在进入下一个运算步长时,计时器已启动,对计时器进行自增运算,并将此时的反馈值vr(n)保存至缓存值vc,如果计时器到时,则关闭计时器,并结束本轮运算。
42.除上述实施例外,本发明还可以有其他实施方式。凡采用等同替换或等效变换形成的技术方案,均落在本发明要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1