定日镜校准
本发明涉及定日镜(heliostat)校准。
背景技术:
1、定日镜是双轴系统上的太阳跟踪反射镜,其将阳光反射到固定位点上。多个定日镜可以将阳光集中到单个目标上,诸如集中式太阳能(concentrated solar power,csp)设施(plant)的热接收器。csp设施包括将阳光反射到被容纳在塔顶部的接收器上的定日镜场。接收器加热工作流体,该工作流体可以被用于驱动涡轮机产生电力,或者可以被用作处理热源,诸如在锰矿石进入熔炉之前加热锰矿石。
2、太阳的精确方位角和仰角在给定地理位置中的任何特定时刻都是已知的,并且定日镜跟踪系统使用该信息来以镜面的法线二等分(bisect)太阳和目标之间的角度的方式调节其致动器。
3、各个定日镜通常都具有开环控制。这意味着定日镜在运行时不会忙个不停地接收反馈,因为一个定日镜反射的光由于它们都聚焦于同一接收器上而无法与数百个其它定日镜反射的光区分开。为此,需要频繁地对定日镜进行校准,以维持合理的跟踪准确度并且确保尽可能多的光被聚焦于目标接收器上。
4、当前最常用的定日镜校准手段是利用光束表征系统(beam characterizationsystem,bcs)。利用该系统,通常在塔上的热接收器下方几米处设置白色校准目标,并且在已知位置处设置摄像机。指示定日镜控制系统从接收器向下移动至校准目标。在摄像机的帮助下,可以确定定日镜的光束正反射在何处的确切位点。如果所反射的光束不在预期位点上,则相应地更新定日镜跟踪模型的参数。这等同于一个校准点。
5、校准目标不被设计为承受多于几个定日镜一次反射于其上。每定日镜每校准点可能花费约2分钟。这相当于具有5000个定日镜的场的10000分钟或170小时的校准时间。在每天仅有约8小时的校准时间的情况下,这意味着可能花费20天至21天来得到场中所有定日镜的单个校准点。理想情况下,为了准确地确定定日镜跟踪模型的参数,需要多于20个校准点。这就相当于416天的校准时间(完全超过一年),来完全校准这种定日镜场。
6、由于定日镜无法经常使用bcs系统来进行校准,因此,这些定日镜的物理构造必须比它们能够更经常地进行校准时的情况大得多且更刚性。由于定日镜场的成本可以表示为csp设施成本的大约三分之一,因此,减小定日镜的成本将是有利的。
7、虽然已经提出了用于对定日镜进行校准的其它方法(诸如使用激光器、竖立更多的目标、将摄像机置于定日镜本身上、甚或使用飞行器),但是除了别的问题以外,这些方法还可能因从所反射的图像中准确地确定相关向量方面的问题而不够准确。在找到定日镜的取向并使该取向与相关的致动器值相关的方面也存在困难。
8、前面对本发明的背景技术的讨论仅旨在便于理解本发明。应意识到,该讨论不是确认或承认所提及的任何材料在本技术的优先权日是本领域公知常识的一部分。
技术实现思路
1、根据本发明,提供了一种对定日镜进行校准的方法,所述方法包括:
2、对成像设备进行定位和定向,以使由定日镜反射的校准目标在成像设备处可见,该成像设备具有已知位置;
3、借助于成像设备,拍摄定日镜的包括在该定日镜上可见的所反射的校准目标的图像;
4、标识该图像中的所反射的校准目标的多个特征;
5、使用所述多个特征来确定图像内的反射质心;
6、将该图像内的反射质心映射至校准目标上的对应质心位置;
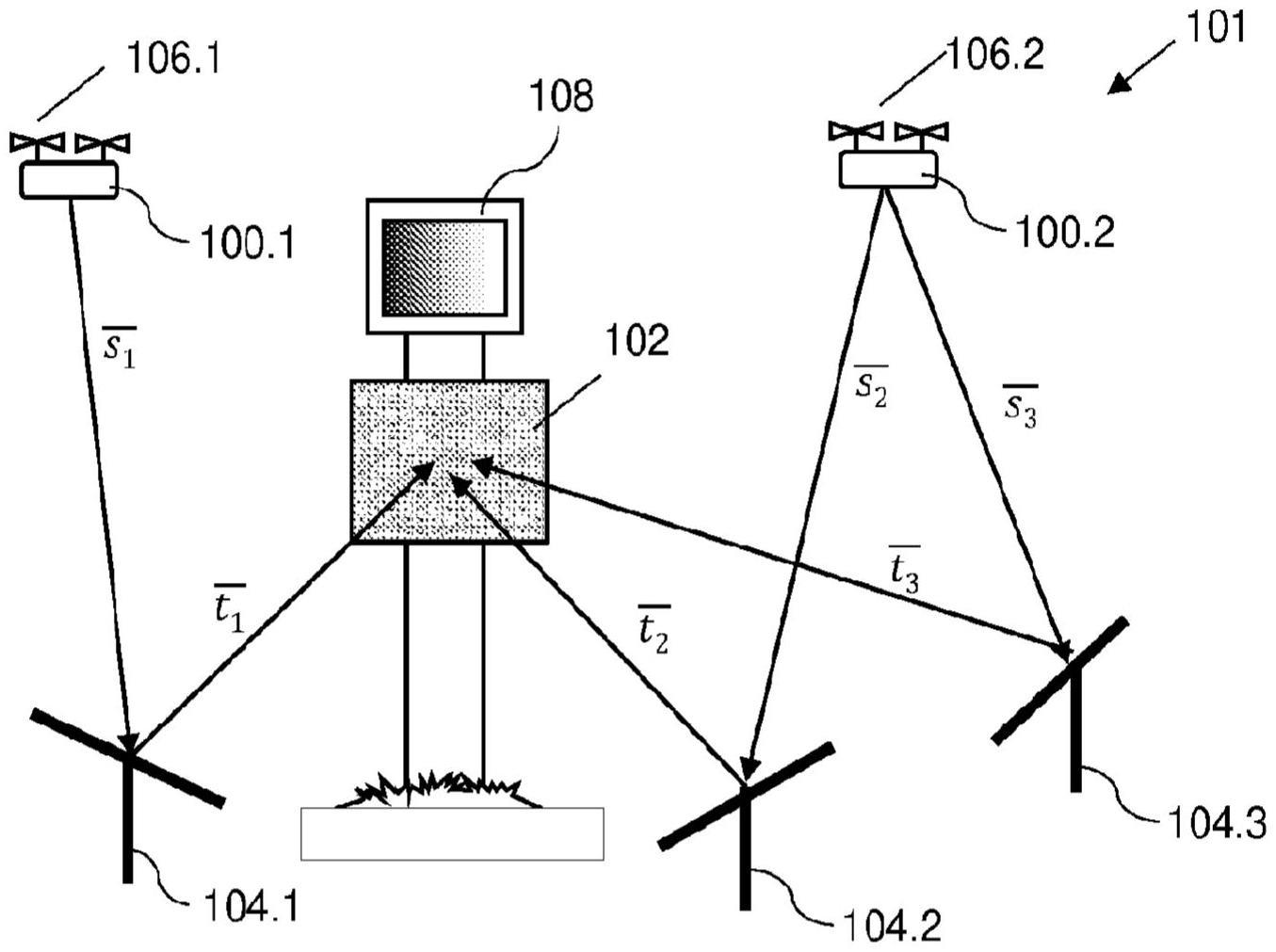
7、确定在校准目标上的质心位置与定日镜的已知位置之间延伸的向量
8、确定在成像设备的已知位置与定日镜的已知位置之间延伸的向量
9、将定日镜的法向量确定为将向量和向量二等分的向量;以及
10、通过使用所确定的向量对跟踪模型的参数进行更新来校准定日镜。
11、在一个实施方式中,所述校准目标被划分成许多区段(segment),各个区段皆表示所述特征中的被标识的一个特征。这些区段可以具有应用至其的可视编码,以使所述区段的子集可以在全部区段内被唯一地标识。可视编码可以包括被应用至各个区段的至少一部分的颜色。在该实施方式中,仅所述区段的子集在图像内可见。
12、确定图像内的反射质心的步骤可以包括:确定图像内示出的区段的面积的加权平均值。图像中示出的区段的面积可以基于图像中的处于该区段内的像素数量来确定。
13、在第二实施方式中,可以使用现有的校准目标,该校准目标可以不被划分成区段。在该实施方式中,所述方法可以包括以下步骤:
14、确定图像中的与定日镜的中心相对应的点(a)的坐标;
15、确定图像中的所反射的校准目标的被标识的特征(h1、h2、h3、h4)的坐标;
16、确定将特征(h1、h2、h3、h4)变换成校准目标上的对应特征的实际坐标的投影变换矩阵(h);
17、将投影变换矩阵(h)应用至中心点(a),以便确定目标上的与中心点(a)相对应的点(b)的坐标,该点(b)被指定为校准目标上的质心位置。
18、在第二实施方式中,确定中心点(a)的坐标的步骤可以包括:对图像进行分析以标识定日镜的角(corner)(p1、p2、p3、p4);以及计算中心点(a)作为连接这些角的线相交的点。此外,根据第二实施方式,所反射的校准目标的所述被标识的特征(h1、h2、h3、h4)可以是所反射的校准目标的四个角。
19、可以将成像设备安装在诸如无人机的飞行器上,或者可以将成像设备安装在被支承在地面上的杆或基座上。
20、所述方法可以包括将定日镜移动到校准取向的初始步骤。
21、关于成像设备记录的各个图像,可以重复所述方法,以便迅速获得多个向量,以供在对跟踪模型的参数进行更新时使用。
22、成像设备的已知位置可以是相对于定日镜的、太阳在白天不会移动到的位置。这使得可以更准确地定义定日镜跟踪模型,并且具有在使用太阳的反射进行校准时不可用的校准点。
23、成像设备的位置可以借助于实时动态(real-time kinematic,rtk)全球定位系统(global positioning system,gps)来确定。
24、一个成像设备能够通过拍摄多于一个定日镜的图像来对多于一个定日镜从各个已知位置进行校准。
25、可以将成像设备移动至连续的已知位置,以便连续获得不同的校准点。
26、可以在定日镜场内同时采用多于一个成像设备。
27、本发明延伸至一种对定日镜进行校准的系统,该系统包括:
28、成像设备;
29、用于对成像设备进行定位和定向以使由定日镜反射的校准目标在该成像设备处可见的装置;
30、位置检测系统,该位置检测系统用于确定成像设备的位置;以及
31、处理器;
32、其中,成像设备拍摄定日镜的包括在该定日镜上可见的所反射的校准目标的图像;
33、并且其中,该处理器:
34、标识图像中的所反射的校准目标的多个特征;
35、使用所述多个特征来确定图像内的反射质心;
36、将图像内的反射质心映射至校准目标上的对应质心位置;
37、确定在校准目标上的质心位置与定日镜的已知位置之间延伸的向量
38、确定在成像设备的已知位置与定日镜的已知位置之间延伸的向量以及
39、将定日镜的法向量确定为将向量和向量二等分的向量,向量可用于通过对定日镜的跟踪模型的参数进行更新来校准该定日镜。
40、下面参照附图,仅通过示例的方式对本发明的实施方式进行描述。
- 还没有人留言评论。精彩留言会获得点赞!