一种具有净化空气功能的智能机器人
1.本发明涉及机器人技术领域,特别的,是一种具有净化空气功能的智能机器人。
背景技术:
2.如今机器人发展的特点可概括为:横向上,应用面越来越宽。由95%的工业应用扩展到更多领域的非工业应用,像做手术、采摘水果、剪枝、巷道掘进、侦查、排雷,还有空间机器人、潜海机器人,具有净化空气功能的智能机器人属于机器人的一种,现有的具有净化空气功能的智能机器人在使用时会出现以下弊端:一般会通过调试杆控制叶片在滑槽内的倾斜角度,进而改变进风口的风向,加强机器人净化空气的功能,当调试杆引导叶片向下调整进风口的风向时,将会在进风口向内倾斜摆动,会对叶片产生迎风阻力,使其在调试杆的引导方向上产生反向的抵抗力,以致于叶片难以顺畅配合调试杆沿着滑槽的弧形内侧调整位置,容易造成其顺风向缩小甚至闭合气流的流通通道,降低该机器人的净化空气功能。
技术实现要素:
3.针对上述问题,本发明提供一种具有净化空气功能的智能机器人,其结构包括机体、显示器、握把、按钮、进风机构,所述机体通过按钮与显示器之间采用电性连接的方式相配合,且连接有握把,所述进风机构安装在机体内,所述进风机构包括滑槽、调试杆、助力体、叶片、连杆、并联配件,所述滑槽连接在机体上,其通过助力体滑动配合有叶片,所述叶片通过并联配件连接在连杆上,所述连杆连接在调试杆上,所述调试杆连接在滑槽上。
4.作为本发明的进一步改进,所述助力体包括护框、顶撑装置、拨动片、调距板、分散结构、挡勾,所述护框连接在滑槽和叶片上,且通过拨动片设有顶撑装置和挡勾,所述挡勾通过分散结构间隙配合在顶撑装置上,且活动卡合在调距板上。
5.作为本发明的进一步改进,所述调距板通过顶撑装置活动卡合在拨动片下,且连接在护框上,非常巧妙的实现了同一平面内上相邻结构之间的距离调整。
6.作为本发明的进一步改进,所述顶撑装置包括摆臂、锁头、隔垫、扒紧件、捆绳,所述摆臂通过隔垫和挡勾滑动配合在拨动片上,且连接有捆绳,所述捆绳通过扒紧件间隙配合在调距板上,所述隔垫上连接有锁头。
7.作为本发明的进一步改进,所述锁头间隙配合在拨动片上,且滑动配合在调距板上,能对拨动片起到定位的作用。
8.作为本发明的进一步改进,所述扒紧件包括撑夹、顶把、翘板、辅压板、引导囊,所述撑夹通过辅压板连接在引导囊上,且间隙配合在调距板上,所述引导囊下连接有翘板,所述翘板滑动配合在隔垫上,所述辅压板内活动卡合有顶把,所述顶把过渡配合在捆绳上。
9.作为本发明的进一步改进,所述分散结构包括上拱板、控压件、内收片、顶锉、扎脚,所述上拱板和内收片通过控压件连接有扎脚,且内收片过渡配合在摆臂上,所述扎脚间隙配合在挡勾和顶锉上。
10.作为本发明的进一步改进,所述控压件包括承接板、推挤座、弯折扣、指引板、定点架,所述承接板和指引板连接在定点架上,且指引板连接在弯折扣上,所述弯折扣连接在推挤座上,且间隙配合有顶锉,所述推挤座通过调距板间隙配合在摆臂上。
11.有益效果与现有技术相比,本发明的有益效果:1、本发明在助力体上设有顶撑装置和分散结构,利用顶撑装置和分散结构在调距板上相配合,当叶片在进风口向内倾斜摆动时,将会借助护框推挤拨动片扩张顶撑装置在调距板上,向挡勾上滑动,使得挡勾牵引着分散结构外扩向下翻卷,能有效控制叶片与滑槽边缘之间的间距,确保叶片在滑槽内运动阻力小且在限定范围内运转灵活,提升了叶片与调试杆之间的同步性和对进风口的风向控制。
12.2、本发明由于顶把受限于引导囊和辅压板,会向上推动捆绳,有助于捆绳牵拉摆臂卡滞在撑夹的弧形开口上,促进结构之间加倍的紧固配合。
13.3、本发明通过扎脚的横向撑开,能为之间的顶锉提供向弯折扣的底部凹陷处转动的动力,有效加强指引板和承接板翻卷的方向和速度,便于推进下一进程的发展。
附图说明
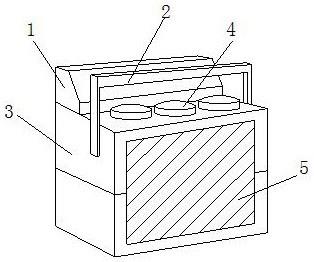
14.图1为本发明一种具有净化空气功能的智能机器人的结构示意图。
15.图2为本发明进风机构的侧视结构示意图。
16.图3为本发明助力体的俯视结构示意图。
17.图4为本发明顶撑装置的平面结构示意图。
18.图5为本发明扒紧件的平面结构示意图。
19.图6为本发明分散结构的平面结构示意图。
20.图7为本发明控压件的平面结构示意图。
21.图中:机体-3、显示器-1、握把-2、按钮-4、进风机构-5、滑槽-q5、调试杆-w2、助力体-e1、叶片-r3、连杆-t4、并联配件-g6、护框-y34、顶撑装置-u33、拨动片-i32、调距板-o31、分散结构-p35、挡勾-q36、摆臂-3a3、锁头-3s2、隔垫-3d1、扒紧件-3f4、捆绳-3h5、撑夹-j41、顶把-k44、翘板-l42、辅压板-z43、引导囊-x45、上拱板-5c3、控压件-5v2、内收片-5b1、顶锉-5m5、扎脚-5n4、承接板-w24、推挤座-e23、弯折扣-r22、指引板-t21、定点架-y25。
具体实施方式
22.基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
23.实施例1如图1-图3所示,本发明提供一种具有净化空气功能的智能机器人,其结构包括机体3、显示器1、握把2、按钮4、进风机构5,所述机体3通过按钮4与显示器1之间采用电性连接的方式相配合,且铰接连接有握把2,所述进风机构5安装在机体3内,所述进风机构5包括滑槽q5、调试杆w2、助力体e1、叶片r3、连杆t4、并联配件g6,所述滑槽q5焊接连接在机体3上,其通过助力体e1滑动配合有叶片r3,所述叶片r3通过并联配件g6铰接连接在连杆t4上,所述连杆t4固定连接在调试杆w2上,所述调试杆w2焊接连接在滑槽q5上,所述助力体e1包括
护框y34、顶撑装置u33、拨动片i32、调距板o31、分散结构p35、挡勾q36,所述护框y34焊接连接在滑槽q5和叶片r3上,且通过拨动片i32设有顶撑装置u33和挡勾q36,所述挡勾q36通过分散结构p35间隙配合在顶撑装置u33上,且活动卡合在调距板o31上,所述调距板o31为倒拱桥结构,通过顶撑装置u33活动卡合在拨动片i32下,且固定连接在护框y34上,非常巧妙的实现了同一平面内上相邻结构之间的距离调整,本发明在助力体e1上设有顶撑装置u33和分散结构p35,利用顶撑装置u33和分散结构p35在调距板o31上相配合,当叶片r3在进风口向内倾斜摆动时,将会借助护框y34推挤拨动片i32扩张顶撑装置u33在调距板o31上,向挡勾q36上滑动,使得挡勾q36牵引着分散结构p35外扩向下翻卷,能有效控制叶片r3与滑槽q5边缘之间的间距,确保叶片r3在滑槽q5内运动阻力小且在限定范围内运转灵活,提升了叶片r3与调试杆w2之间的同步性和对进风口风向的控制。
24.实施例2如图4-图7所示,在实施例1的基础上,本发明结合以下结构部件的相互配合,所述顶撑装置u33包括摆臂3a3、锁头3s2、隔垫3d1、扒紧件3f4、捆绳3h5,所述摆臂3a3通过隔垫3d1和挡勾q36滑动配合在拨动片i32上,且固定连接有捆绳3h5,所述捆绳3h5通过扒紧件3f4间隙配合在调距板o31上,所述隔垫3d1上焊接连接有锁头3s2,所述锁头3s2间隙配合在拨动片i32上,且滑动配合在调距板o31上,能对拨动片i32起到定位的作用,所述扒紧件3f4包括撑夹j41、顶把k44、翘板l42、辅压板z43、引导囊x45,所述撑夹j41通过辅压板z43铰接连接在引导囊x45上,且间隙配合在调距板o31上,所述引导囊x45下固定连接有翘板l42,所述翘板l42滑动配合在隔垫3d1上,所述辅压板z43内活动卡合有顶把k44,所述顶把k44过渡配合在捆绳3h5上,所述分散结构p35包括上拱板5c3、控压件5v2、内收片5b1、顶锉5m5、扎脚5n4,所述上拱板5c3和内收片5b1通过控压件5v2铰接连接有扎脚5n4,且内收片5b1过渡配合在摆臂3a3上,所述扎脚5n4间隙配合在挡勾q36和顶锉5m5上,所述控压件5v2包括承接板w24、推挤座e23、弯折扣r22、指引板t21、定点架y25,所述承接板w24和指引板t21焊接连接在定点架y25上,且指引板t21固定连接在弯折扣r22上,所述弯折扣r22嵌接连接在推挤座e23上,所述推挤座e23通过调距板o31间隙配合在摆臂3a3上,由于顶把k44受限于引导囊x45和辅压板z43,会向上推动捆绳3h5,有助于捆绳3h5牵拉摆臂3a3卡滞在撑夹j41的弧形开口上,促进结构之间加倍的紧固配合,通过扎脚5n4的横向撑开,能为之间的顶锉5m5提供向弯折扣r22的底部凹陷处转动的动力,有效加强指引板t21和承接板w24翻卷的方向和速度,便于推进下一进程的发展。
25.下面对上述技术方案中的一种具有净化空气功能的智能机器人的工作原理作如下说明:本发明在使用过程中,当调试杆w2引导叶片r3向下调整进风口的风向时,为避免叶片r3在进风口向内倾斜摆动,会在其上产生迎风阻力,导致叶片r3会顺风向缩小甚至闭合气流的流通通道,因此,在滑槽q5内设有助力体e1,当叶片r3在滑槽q5内挤压护框y34时,护框y34将会打开放松对拨动片i32的限制,根据重力向下的原理,拨动片i32会向下依靠在调距板o31上,使得调距板o31的可拉伸结构向下拱出,能带动撑夹j41借助辅压板z43的按压,而配合引导囊x45倾斜滑动在调距板o31上,使得引导囊x45堆积内卷在顶把k44上,托举着捆绳3h5向外绷紧,控制捆绳3h5牵引摆臂3a3尖端搭接在撑夹j41的弧度开口上,沿着拨动片i32平面端上滑动,也引导囊x45推挤着底部的翘板l42撬动隔垫3d1边滑动拉伸,边推
动锁头3s2卡锁在下摆的拨动片i32上,使得下摆的拨动片i32定型在调距板o31上,能控制拨动片i32拱动打开的护框y34,使其两端挡勾q36借助沿着滑动的摆臂3a3进一步在扎脚5n4上回勾外旋,控制扎脚5n4同步借力于挡勾q36上,绷紧牵扯顶锉5m5晃动在指引板t21上,途中,能推挤上拱板5c3和内收片5b1在定点架y25上相互对顶,带动上拱板5c3和内收片5b1对承接板w24发生连贯性的波浪线状起伏运动,使得承接板w24能不间断缩合交叠在指引板t21下,在指引板t21之间的弯折扣r22两侧递进式挤压,使其像心脏一样间歇性上下弹动,影响不稳定的顶锉5m5不间断的在指引板t21上一同上下甩动,引导扎脚5n4沿着挡勾q36底部逐步滑出,将间接性改变其上方挡勾q36的外旋方向,有助于打开的护框y34能借力倾向卡紧在叶片r3和滑槽q5内侧,有效把控叶片r3与滑槽q5边缘之间的间距和倾斜角度能,也能减小叶片r3在滑槽q5内的运动阻力小,提升叶片r3在限定范围内灵活运转,保障叶片r3与调试杆w2之间的同步性,确保该机器人的智能净化空气功能。
26.在本发明的描述中,需要理解的是,术语“中心”、“侧向”、“长度”、“宽度”、“高 度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“侧”等指示的方位或位置关系为基于附图中所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
27.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1