升降烟机自动识别更换锅具的控制方法与流程
本发明涉及升降烟机,尤其是,本发明涉及一种升降烟机自动识别更换锅具的控制方法。
背景技术:
1、升降烟机是一种集烟腔可以升降的吸油烟机。通过改变集烟腔的位置,减小集烟腔与锅具之间的距离来提高抽吸效果;还可以在非工作时,将集烟腔缩回,减少烟机的体积便于用户操作。现有技术中,对于集烟腔的升降控制通常是设置一个传感器检测到锅的距离,然后匹配最佳吸烟效果的的距离后,调整集烟腔高度,使集烟腔和锅的距离保持在该最佳吸烟效果距离。
2、现在对于升降烟机的结构设计也越来越多,例如现有一种智能升降吸油烟机,包括壳体,设置在壳体下方的导烟板或集烟罩,壳体内设有用于驱动导烟板或集烟罩上升或下降的驱动电机,及与驱动电机电连接的用于启动或关闭驱动电机的控制板,驱动电机通过传动机构与导烟板或集烟罩联接,由传动机构将驱动电机输出轴的旋转运动转为导烟板或集烟罩的上下运动,所述壳体内设有第一磁体,第一磁体与驱动电机的输出轴联接、并由驱动电机驱动其转动;所述壳体内与第一磁体相对的位置还设有检测装置,控制板根据检测电路的输出信号实时检测驱动电机的旋转角度,获取导烟板或集烟罩当前的升降位置。上述发明能精确获取导烟板或集烟罩当前的升降位置,达到智能控制吸油烟效果的目的。
3、但是,由于用户的烹饪需求多样性,在烹饪过程中可能需要换锅。若是用户根据其烹饪需求换锅时,则原本预设的高度就无法与新换上的锅匹配,吸烟效果无法达到最佳,需要手动按烟机相关键位来重新调整集烟腔高度后才能使吸烟效果达到最佳,过程较麻烦;尤其是当用户小锅换上大锅时,原有匹配的集烟腔高度可能会使用户操作空间较小,影响用户体验。
4、因此为了解决上述问题,设计一种合理高效的升降烟机自动识别更换锅具的控制方法对我们来说是很有必要的。
技术实现思路
1、本发明的目的在于提供一种可升降烟机自动识别更换锅具的控制方法,通过传感器检测距离变化来判断用户换锅操作,根据换锅后的距离值与预设标准值进行对比来判断用户换上新锅的高矮情况,对应控制升降烟机上升或下降来获取换锅后传感器到新锅平面的高度,从而调整集烟腔距离,智能化高,对于更换锅具识别准确度高。
2、为达到上述目的,本发明采用如下技术方案得以实现的:
3、一种升降烟机自动识别更换锅具的控制方法,方法包括以下步骤:
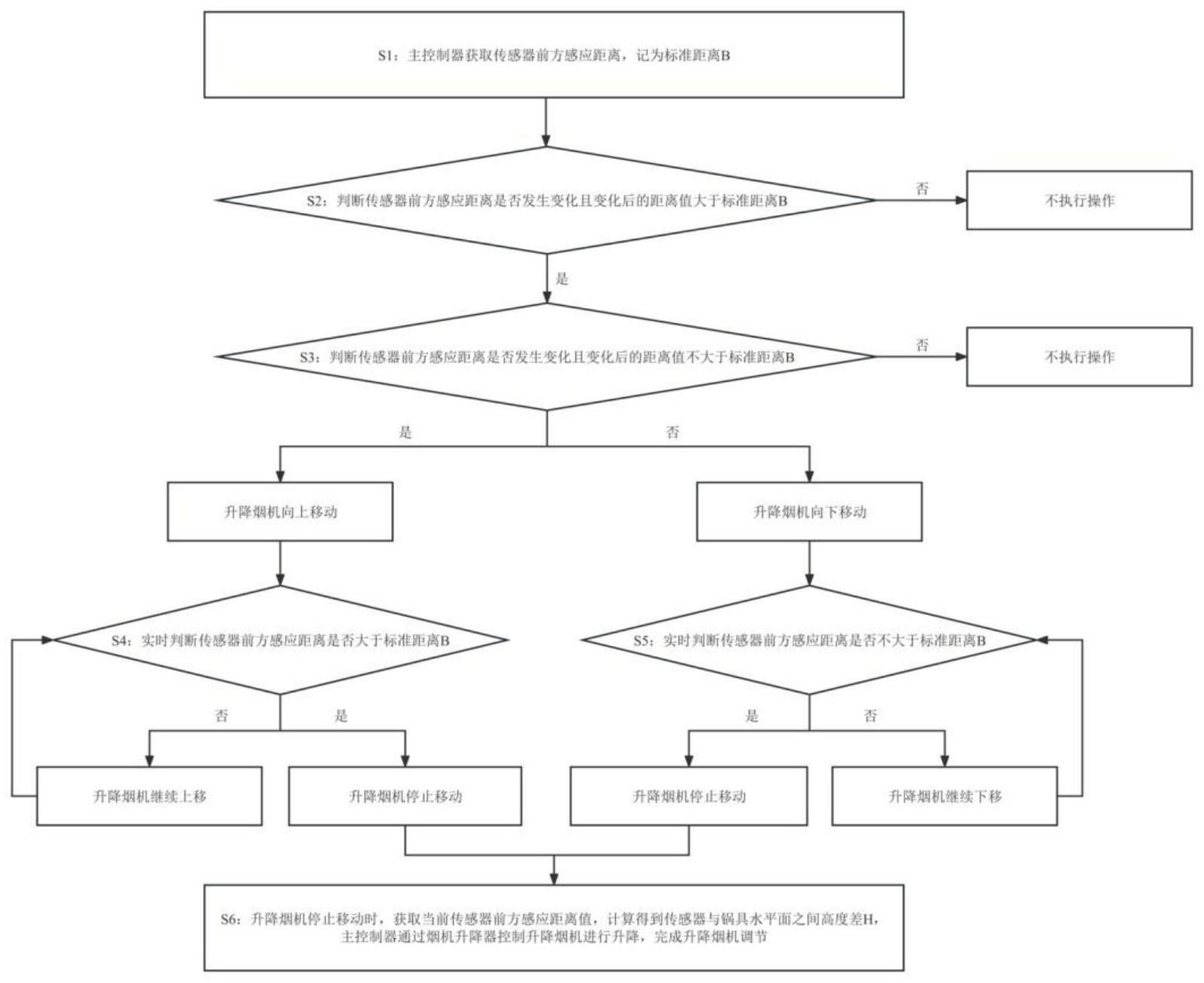
4、s1:主控制器获取传感器前方感应距离,记为标准距离b;
5、s2:判断传感器前方感应距离是否发生变化且变化后的距离值大于标准距离b,若是则执行步骤s3;反之则不执行操作;
6、s3:判断传感器前方感应距离是否发生变化且变化后的距离值不大于标准距离b,若是则升降烟机向上移动,并执行步骤s4;反之则升降烟机向下移动,并执行步骤s5;
7、s4:实时判断传感器前方感应距离是否大于标准距离b,若是则升降烟机停止移动;反之则升降烟机继续上移;
8、s5:实时判断传感器前方感应距离是否不大于标准距离b,若是则升降烟机停止移动;反之则升降烟机继续下移。
9、作为本发明的优选,还包括步骤s6:升降烟机停止移动时,获取当前传感器前方感应距离值,计算得到传感器与锅具水平面之间高度差h,主控制器通过烟机升降器控制升降烟机进行升降,完成升降烟机调节。
10、作为本发明的优选,所述传感器向所述灶头方向倾斜向下设置;
11、执行步骤s1时,在升降烟机完成启动进入正常工作状态后,主控制器获取传感器前方感应距离以及传感器朝向方向与竖直方向的夹角a;
12、执行步骤s6时,基于当前传感器前方感应距离值和传感器朝向方向与竖直方向的夹角a,计算得到传感器与锅具水平面之间高度差h。
13、作为本发明的优选,执行步骤s2时,若传感器前方感应距离未发生变化,以及发生变化且变化后的距离值不大于标准距离b,则说明锅具仍在灶台上,不执行操作。
14、作为本发明的优选,执行步骤s3时,具体为:
15、s31:判断第一预定时间内传感器前方感应距离是否发生变化,若是则执行步骤s32,反之则不执行操作;
16、s32:判断第二预定时间内传感器前方感应距离是否稳定不变,若是则执行步骤s33,反之则不执行操作;
17、s33:判断传感器前方感应距离变化稳定后的值是否不大于标准距离b;若是则升降烟机向上移动,并执行步骤s4;反之则升降烟机向下移动,并执行步骤s5。
18、作为本发明的优选,执行步骤s3时,主控制器通过烟机升降器控制升降烟机进行升降移动。
19、作为本发明的优选,执行步骤s4时,升降烟机向上移动时,判断升降烟机是否向上移动到上限位,若是则发出警报;反之则不执行操作。
20、作为本发明的优选,执行步骤s5时,升降烟机向下移动时,判断升降烟机是否向下移动到下限位,若是则发出警报;反之则不执行操作。
21、作为本发明的优选,执行步骤s6时,获取当前传感器前方感应距离值l和传感器朝向方向与竖直方向的夹角a,计算得到传感器与锅具水平面之间高度差h为l*cos a。
22、作为本发明的优选,执行步骤s6时,根据传感器与锅具水平面之间高度差h,计算得到升降烟机所需的调节距离值,判断调节距离值是否不小于预设精度值x,若是则主控制器通过烟机升降器控制升降烟机进行升降所述调节距离值,完成升降烟机控制;反之则不执行操作。
23、本发明一种升降烟机自动识别更换锅具的控制方法有益效果在于:通过传感器检测距离变化来判断用户换锅操作,根据换锅后的距离值与预设标准值进行对比来判断用户换上新锅的高矮情况,对应控制升降烟机上升或下降来获取换锅后传感器到新锅平面的高度,从而调整集烟腔距离,智能化高,对于更换锅具识别准确度高。
技术特征:
1.一种升降烟机自动识别更换锅具的控制方法,其特征在于,方法包括以下步骤:
2.根据权利要求1所述的一种升降烟机自动识别更换锅具的控制方法,其特征在于:
3.根据权利要求2所述的一种升降烟机自动识别更换锅具的控制方法,其特征在于:
4.根据权利要求1所述的一种升降烟机自动识别更换锅具的控制方法,其特征在于:
5.根据权利要求1所述的一种升降烟机自动识别更换锅具的控制方法,其特征在于:
6.根据权利要求5所述的一种升降烟机自动识别更换锅具的控制方法,其特征在于:
7.根据权利要求1所述的一种升降烟机自动识别更换锅具的控制方法,其特征在于:
8.根据权利要求1所述的一种升降烟机自动识别更换锅具的控制方法,其特征在于:
9.根据权利要求2所述的一种升降烟机自动识别更换锅具的控制方法,其特征在于:
10.根据权利要求2所述的一种升降烟机自动识别更换锅具的控制方法,其特征在于:
技术总结
本发明提供一种升降烟机自动识别更换锅具的控制方法,涉及升降烟机技术领域,包括以下步骤:S1:获取传感器感应前方距离B;S2:传感器感应距离大于距离B时执行S3;S3:判断传感器感应距离是否不大于距离B,若是则烟机上移;反之则烟机下移;S4:判断传感器感应距离是否大于传感器与灶台距离,若是则烟机停止,获取感应距离值;S5:判断传感器感应距离是否小于传感器与灶台距离,若是则伸缩停止,获取感应距离值;S6:控制升降烟机升降,修正高度值。本发明通过传感器检测距离变化来判断用户换锅操作,根据换锅后的距离值判断用户换上新锅情况,通过传感器到新锅平面的高度,调整集烟腔距离,智能化高,识别准确度高。
技术研发人员:任富佳,李信合,黄兆伟,方宇佳,白青松
受保护的技术使用者:杭州老板电器股份有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!