一种仿蜈蚣式机场跑道激光除胶机
一种仿蜈蚣式机场跑道激光除胶机
一、技术领域:
1.本发明涉及机场跑道清洁技术以及激光清洗领域,尤其是一种仿蜈蚣式机场跑道激光除胶机。
二、
背景技术:
2.跑道是飞机起飞与降落必备的机场设施之一,由于飞机在高速起飞或降落时轮胎与跑道因摩擦而产生的高温环境,使得飞机轮胎橡胶瞬间熔化,而熔化后形成的橡胶粘熔物会粘附在跑道上,随着大量的飞机频繁的起降,跑道上的粘熔物不断增厚形成一层胶层,使得跑道的摩擦系数降低,导致飞机的制动性能降低,直接影响飞机起降的安全。因此,各个机场均需定时对跑道上的胶痕进行清理,恢复跑道的摩擦系数。目前行业常用的除胶方法有机械抛丸法和高压水枪冲洗法,但这两种方法不但效率低下,而且会对跑道的地面造成损伤,人工作业量也大。激光清洗是通过高能激光束直接辐射在跑道上,根据橡胶和道面本身材料存在的热性能差异,可通过合理调节能量密度使橡胶熔化或者变成碎片清除的同时不损伤道面,但激光清洗对光束移动速度和路径都有着较高的要求,并且激光对人体存在较大的伤害,同时机场跑道除胶要求的作业面积很大,因此急需提出一种高效、高质量的基于激光清洗的跑道专用除胶自动化装置,以保障机场运行安全。
三、
技术实现要素:
3.本发明目的在于提供一种可以为机场跑道除胶的激光清洗设备。包括电源及总控装置、激光输出装置、除胶装置、传动装置。设置光纤激光器机箱与激光输出头机箱与9个四轴并联直角10%半反镜机箱和1个四轴并联直角100%半反镜机箱由同步数控伸缩杆相连,组成仿蜈蚣多足多节式结构,四轴并联动板调整激光输出光束的空间位置,四轴并联动板框驱动直角半反镜的空间角度变化实现激光束扫描,经过场镜聚焦清除跑道橡胶,9个四轴并联直角10%半反镜机箱,最后一个为四轴并联直角100%半反镜机箱,实现分束多位置同时扫描清除橡胶,由准直聚焦镜与光束探测镜组探测激光光束的空间位置,反馈控制激光输出光束的空间位置,同步数控伸缩杆可以伸缩调整机箱之间的距离,可伸长最长,也可收缩最短,数控万向电动脚轮可以配合伸缩与移动,工作时,根据需要仿蜈蚣多足多节式结构可以伸长,形成一排激光清洗头,并排同时激光清洗跑道,大幅度提高了激光清洗效率,工作后,可收缩存放。
4.结构一、电源及总控装置
5.所述的电源及总控装置由计算机控制箱、光纤激光器、箱体、同步连接柱以及传输光纤和电源线、数控万向电动脚轮组成。所述的计算机控制箱和光纤激光器安装在箱体内部。所述的传输光纤连接光纤激光器并与后面的结构连接。所述的数控万向电动脚轮安装在计算机控制箱箱体底部。
6.结构二、激光输出装置
7.所述的激光输出装置由聚焦准直镜、激光输出头、转动云台、四轴并联动板、同步
数控伸缩杆以及箱体、数控万向电动脚轮组成。所述的聚焦准直镜、激光输出头、转动云台、四轴并联动板安装在箱体内部。所述的同步数控伸缩杆安装在箱体的四条侧棱。所述的数控万向电动脚轮安装在激光输出头机箱箱体底部。
8.结构三、除胶装置
9.所述的除胶装置由镜组、箱体、四轴并联数控伸缩杆、同步数控伸缩杆、四轴并联动板框、数控万向电动脚轮组成。所述的镜组由直角10%半反镜、场镜、准直聚焦镜与光束探测镜组组成,通过所述的四轴并联数控伸缩杆以及四轴并联动板框联接并安装在9个四轴并联直角10%半反镜机箱和1个四轴并联直角100%半反镜机箱箱体内部。所述的同步数控伸缩杆安装在9个四轴并联直角10%半反镜机箱和1个四轴并联直角100%半反镜机箱箱体四条侧棱。所述的数控万向电动脚轮安装在9个四轴并联直角10%半反镜机箱和1个四轴并联直角100%半反镜机箱箱体底部。
10.结构四、传动装置
11.所述的装置由四轴并联数控伸缩杆、同步数控伸缩杆及四轴并联动板、四轴并联动板框、数控万向电动脚轮组成。所述的同步数控伸缩杆安装在各个箱体的四条侧棱并与前一个箱体的同步数控伸缩杆连接。所述的四轴并联动板联接激光输出头,通过四轴并联数控伸缩杆安装在激光输出头机箱内部。所述的四轴并联动板框联接各个反射镜,通过四轴并联数控伸缩杆安装在9个四轴并联直角10%半反镜机箱和1个四轴并联直角100%半反镜机箱箱体内部。数控万向电动脚轮安装在各个箱体的底部。
12.本专利核心内容:
13.一种仿蜈蚣式机场跑道激光除胶机,设置1个光纤激光器机箱,右端设有电源线连接外部电源,为整机提供电力,左端通过同步数控伸缩杆与激光输出头机箱相连,光纤激光器机箱内部的光纤激光器通过传输光纤与激光输出头机箱内部的激光输出头相连,计算机控制箱安装在光纤激光器上方,四个数控万向电动脚轮安装在光纤激光器机箱箱体底部的四角,激光输出头机箱右端与光纤激光器机箱相连,左端通过同步数控伸缩杆与四轴并联直角10%半反镜机箱相连,激光输出头机箱内部的四轴并联动板通过四根四轴并联数控伸缩杆安装在激光输出头机箱箱体内部,转动云台安装在四轴并联动板上,激光输出头安装在转动云台上,聚焦准直镜安装在激光输出头前方,四个数控万向电动脚轮安装在激光输出头机箱的箱体底部四角,激光输出头机箱左端共有9个四轴并联直角10%半反镜机箱和1个四轴并联直角100%半反镜机箱,通过同步数控伸缩杆相互串联,9个四轴并联直角10%半反镜机箱和1个四轴并联直角100%半反镜机箱内均装有一个四轴并联动板框,通过四根四轴并联数控伸缩杆安装在 9个四轴并联直角10%半反镜机箱和1个四轴并联直角100%半反镜机箱箱体内部,前9个四轴并联直角10%半反镜机箱内含有一面直角10%半反镜安装在四轴并联动板框上,最末端的四轴并联直角100%半反镜机箱内含有一面直角100%半反镜安装在四轴并联动板框上,聚焦准直镜和光束探测镜组安装在9个四轴并联直角10%半反镜机箱和1个四轴并联直角100%半反镜机箱箱体内部的左侧,场镜垂直安装在9个四轴并联直角10%半反镜机箱和1个四轴并联直角100%半反镜机箱箱体内下底面,9个四轴并联直角10%半反镜机箱的箱体和1个四轴并联直角100%半反镜机箱的箱体底部四角均安装有数控万向电动脚轮。
14.将设备放置在机场跑道上,根据需要仿蜈蚣多足多节式结构可以伸长,形成一排
激光清洗头,并排同时激光清洗跑道,大幅度提高了激光清洗效率,工作后,可收缩存放。连接电源后,光纤激光器与通过输出光纤相连的激光输出头配合工作发射出激光,通过聚焦准直镜照射到第一个四轴并联直角10%半反镜箱,通过箱体内部的聚焦准直镜和光束探测镜组的进一步聚焦,照射到箱体内部的直角10%半反镜上,半反镜将一部分光束反射,反射角为45
°
,被反射的激光束会进一步通过位于箱体下方的场镜,而后到达机场跑道胶痕位置并将胶痕融化,随后由工作人员将其清理干净,达到除胶效果,另一部分未被反射的激光束会透过半反镜到达下一个四轴并联直角10%半反镜机箱,除胶原理相同,最末端的四轴并联直角100%半反镜机箱会将激光束全部反射到地面,保证不会有激光透过机器造成安全隐患。安装在机箱四条侧棱的同步数控伸缩杆可通过计算机控制伸长到最长,也可缩短到最短,机箱底部的数控万向电动脚轮可以配合伸缩与移动,使得工作面积大大增加,效率大大提高。
四、附图说明:
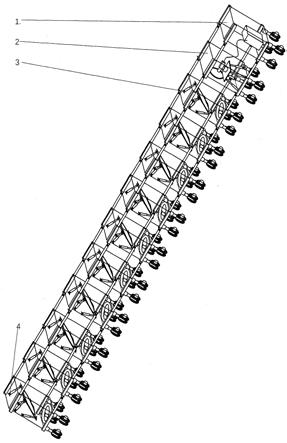
15.图1为一种仿蜈蚣式机场跑道激光除胶机结构图,图2为一种仿蜈蚣式机场跑道激光除胶机收缩图,图3为四轴并联直角10%半反镜机箱结构图,图4为激光输出头机箱结构图,图5为光纤激光器机箱结构图。
16.其中分别为:1、光纤激光器机箱,2、激光输出头机箱,3、四轴并联直角10%半反镜机箱,4、四轴并联直角100%半反镜机箱,5、箱体一,6、半反镜箱四轴并联数控伸缩杆,7、四轴并联动板框,8、直角10%半反镜,9、聚焦准直镜与光束探测镜组,10、场镜,11、数控万向电动脚轮,12、同步数控伸缩杆,13、箱体二,14、聚焦准直镜,15、激光输出头,16、转动云台,17、四轴并联动板,18、激光输出头机箱四轴并联数控伸缩杆,19、箱体三,20、计算机控制箱,21、光纤激光器,22、传输光纤,23、电源线,24、同步连接柱。
五、具体实施方式:
17.(1)结构构成部分:设置光纤激光器机箱1中的四根同步连接柱24与激光输出头机箱 2中的四根同步数控伸缩杆12相连接,将两个机箱串联起来,将计算机控制箱安装在光纤激光器21上,由电源线23连接外部电源为整机提供电力,将数控万向电动脚轮11安装在光纤激光器机箱箱体三19的底部四角,可配合同步数控伸缩杆的伸长和移动,传输光纤22连接光纤激光器21和激光输出头15,二者配合发出激光束,四轴并联动板17与四根激光输出头机箱四轴并联数控伸缩杆18相连并安装在激光输出头机箱箱体二13内部,转动云台16和安装在其上部的激光输出头15二者共同安装在四轴并联动板17上,聚焦准直镜14安装在激光输出头15的左侧,数控万向电动脚轮11安装在激光输出头机箱箱体二13底部四角,四根同步数控伸缩杆12与其右端的四轴并联直角10%半反镜机箱3中的四根同步数控伸缩杆12相连,箱体一5内部设有四根半反镜箱四轴并联数控伸缩杆6并与四轴并联动板框7相连,四轴并联动板框7上安装有直角10%半反镜8,聚焦准直镜与光束探测镜组9安装在箱体一5内部的右端,场镜10安装在箱体一5内部的下端,数控万向电动脚轮11安装在箱体一5底部四角,一共设有9个四轴并联直角10%半反镜机箱,都通过同步数控伸缩杆相互串联,整机末端为四轴并联直角100%半反镜机箱,将直角10%半反镜替换为直角100%半反镜,通过同步数控伸缩杆连接四轴并联直角10%半反镜机箱3和四轴并联直角100%半反镜机箱4。
18.(2)方法原理:将设备放置在机场跑道上,将电源线23连接电源后,光纤激光器21与通过传输光纤22相连的激光输出头15配合工作发射出激光束,通过聚焦准直镜14照射到第一个四轴并联直角10%半反镜箱3,通过箱体一5内部的聚焦准直镜和光束探测镜组9的进一步聚焦,照射到箱体一内部的直角10%半反镜8上,半反镜将一部分光束反射,反射角为45
°
,被反射的激光束会进一步通过位于箱体下方的场镜10,而后到达机场跑道胶痕位置并将胶痕融化,随后由工作人员将其清理干净,达到除胶效果,另一部分未被反射的激光束会透过半反镜到达下一个四轴并联直角10%半反镜机箱,除胶原理相同,最末端的四轴并联直角100%半反镜机箱4会将激光束全部反射到地面,保证不会有激光透过机器造成安全隐患。安装在机箱四条侧棱的同步数控伸缩杆可通过计算机控制伸长到最长,也可缩短到最短,机箱底部的数控万向电动脚轮11可以配合伸缩与移动,使得工作面积大大增加,效率大大提高。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1