用于陡壁斜面远程激光清洗的爬壁机器人装置及作业流程
本发明涉及激光清洗维护,尤其涉及一种用于陡壁斜面远程激光清洗的爬壁机器人装置及作业流程。
背景技术:
1、大型设备如风力发电机塔筒、储油罐和船舰等表面需要定期进行相应的清洗维护,去除表面像铁锈之类的污染物。在该行业内,主要通过人工采用机械磨洗和喷砂等传统清洗技术来进行表面的清洗维护作业;然而这种方法耗费一定的时间和成本,还需要作业人员进行危险性高的高空作业。虽然有将传统清洗方法和遥控运载机器人相结合的创新设备来提高清洗效率以及进行智能化清洗,但传统清洗方法仍然存在像损伤基材和排放污染物等问题,并没有得到较好的解决。
2、而激光清洗技术作为一项新型绿色清洗技术,其具有无接触和适用性广泛等特点,较传统清洗方式更为节能与环保,并且能进行高效率与高质量的清洗作业。目前市场上有手持式激光清洗设备可完成相应的人工清洗任务,但是对于具有陡壁斜面的大型设备来说,仍然是无法智能化地把激光清洗技术应用到其中。
3、因此,将新型激光清洗技术和遥控爬壁机器人技术相结合,提供一种用于陡壁斜面远程激光清洗的爬壁机器人装置很有必要。
技术实现思路
1、本发明的目的在于提供一种用于陡壁斜面远程激光清洗的爬壁机器人装置及作业流程,其应用时,可远程操控爬壁机器人完成对大型设备如风力发电机塔筒、储油罐和船舰等表面清洗维护的作业任务,无需人工攀爬进行清洗操作,同时结合激光清洗技术,实现高效率、高质量以及节能环保的清洗维护目标。
2、本发明的目的是这样实现的,具体地说:
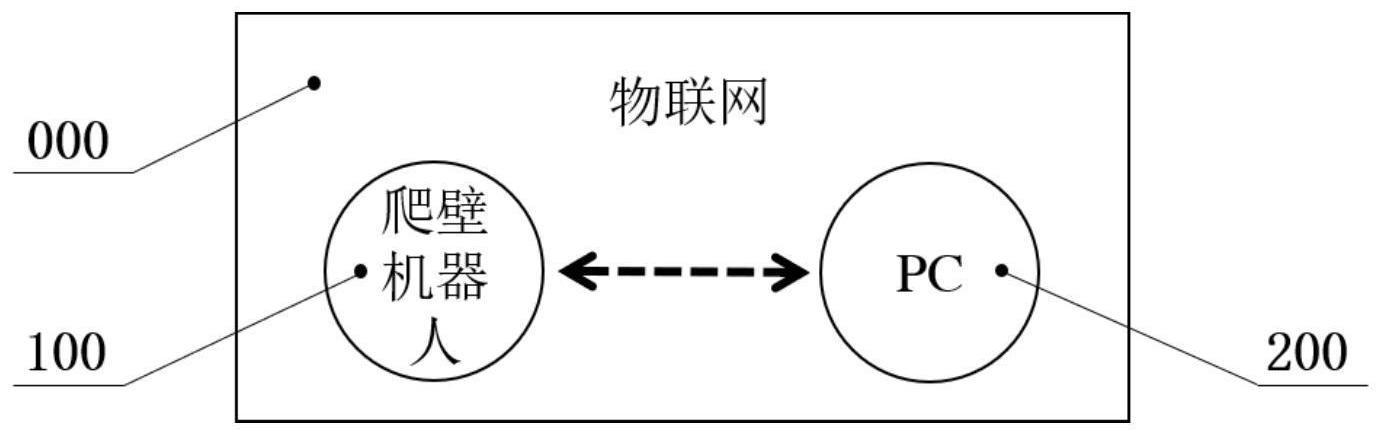
3、爬壁机器人装置包括物联网,设置有爬壁机器人和个人电脑;个人电脑通过物联网和爬壁机器人通信,控制爬壁机器人100实现激光清洗;
4、一、所述的爬壁机器人包括主体、导航摄像头、激光器、永磁吸附单元、传动履带、主动履带轮、外侧挡板、从动履带轮、升降机构、检测摄像头、激光发射头和控制单元;
5、其位置和连接关系是:
6、导航摄像头设置在主体顶部前面,导航摄像头与控制单元电性连接;
7、激光器设置在主体顶部后面,与激光发射头通过封装导线连接;
8、永磁吸附单元设置在传动履带的表面;
9、传动履带设置在主动履带轮和从动履带轮的外轮廓表面;
10、主动履带轮设置在主体底部后面,通过转轴与主体连接,用于提供动力,与传动履带105的履槽啮合完成传动;
11、外侧挡板设置在主动履带轮和从动履带轮的外侧;
12、从动履带轮设置在主体底部前面,通过转轴与主体连接,用于辅助运动;同时与传动履带105的履槽啮合完成传动;
13、升降机构设置在主体左端上斜面,升降机构的电机与控制单元电性连接;
14、检测摄像头设置在主体的左端下斜面,与控制单元电性连接;
15、激光发射头设置在升降机构的载物台上;
16、控制单元设置在主体内。
17、二、所述的个人电脑选用移动工作站,内嵌有控制系统的软件,和爬壁机器人100通信,控制爬壁机器人实现激光清洗;设置有功能函数,包括移动操作、激光参数设置、激光发射控制、视觉检测、视觉导航和升降控制。
18、与现有技术相比,本发明的具有下列优点和积极效果:
19、①通过远程操纵磁吸附行走机构和导航摄像头实现在陡斜表面的视觉导航移动、控制激光器和激光发射头实现激光参数的配置和激光的发射,操控检测摄像头实现对激光清洗效果的视觉检测,以及控制升降机构实现激光焦点位置的变化以调整激光清洗效果。
20、②具有激光焦点调整的功能,能够适用于多种工况。
21、③基于物联网和分布式多机通信方式,个人电脑和爬壁机器人装置通过爬壁机器人完成远程控制连接,通过应用个人电脑中的功能函数使爬壁机器人的控制单元做出相对应的部件控制:通过移动操作功能实现对磁吸行走机构的远程操控,通过激光参数设置功能实现对激光器的远程调参;通过激光发射控制功能实现对激光器及激光发射头的触发控制;通过视觉检测功能实现对检测摄像头的控制;通过视觉导航功能实现对导航摄像头的操纵,以及通过升降控制功能实现对升降机构的移动控制。
22、总之,本发明基于功能间的相互配合,从而完成陡壁斜面的远程激光清洁维护作业,达到高效率、高质量及节能环保的清洗维护目的,适用于对大型设备如风力发电机塔筒、储油罐和船舰等表面清洗维护的作业任务,无需人工攀爬进行清洗操作,同时结合激光清洗技术,实现高效率、高质量以及节能环保的清洗维护目标。
技术特征:
1.一种用于陡壁斜面远程激光清洗的爬壁机器人装置,其特征在于:
2.按权利要求1所述的用于陡壁斜面远程激光清洗的爬壁机器人装置,其特征在于:
3.按权利要求1所述的用于陡壁斜面远程激光清洗的爬壁机器人装置,其特征在于:
4.按权利要求1所述的用于陡壁斜面远程激光清洗的爬壁机器人装置,其特征在于:
5.按权利要求1所述的用于陡壁斜面远程激光清洗的爬壁机器人装置,其特征在于:
6.按权利要求1所述的用于陡壁斜面远程激光清洗的爬壁机器人装置,其特征在于:
7.按权利要求1所述的用于陡壁斜面远程激光清洗的爬壁机器人装置,其特征在于:
8.基于权利要求1、2、3、4、5、6或7所述爬壁机器人装置的远程激光清洗作业流程是:
技术总结
本发明公开了一种用于陡壁斜面远程激光清洗的爬壁机器人装置及作业流程,涉及激光清洗维护技术领域。本装置包括物联网,设置有爬壁机器人和个人电脑;个人电脑通过物联网和爬壁机器人通信,控制爬壁机器人实现激光清洗。本作业流程是:①远程控制爬壁机器人移动到清洗作业的区域;②设置激光器参数,控制升降机构调整激光发射头的位置,启动激光;③通过检测摄像头判断是否达到清洗效果,是则进入步骤④,否则关闭激光,再跳转到步骤②;④通过导航摄像头进行移动清洗;⑤清洗完成,关闭激光,回收爬壁机器人。本发明适用于对大型设备如风力发电机塔筒、储油罐和船舰等表面清洗维护的作业任务,实现高效率、高质量以及节能环保的清洗维护目标。
技术研发人员:王曦照,何昊键,许杰,刘海星,杨春勇
受保护的技术使用者:中南民族大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!