半导体器件表面瑕疵异物检测处理方法及其系统与流程
本发明涉及半导体检测,特别涉及一种半导体器件表面瑕疵异物检测处理方法及其系统。
背景技术:
1、电子元器件和光学元件在生产组装的过程中,通常需要对电子元器件和光学元件进行表面外观检测。表面外观检测通常是检测电子元器件的表面和光学元件的表面是否有瑕疵、脏污、划痕、裂纹、破损、灰尘、指纹、水印、wire bond异常和die bond异常等表面外观问题。当电子元器件的表面和光学元件的表面被检查到灰尘时,还需要对具有灰尘的电子元器件的表面和具有灰尘的光学元件的表面进行清洁。现有的灰尘清除装置通常采用湿法清洗方法或吹气清洁方法实现对电子元器件的表面和光学元件的表面进行清洁。
2、现有方法是当物品表面出现附着异物时,通常采用以下几种方法处理:粘除、清洗、擦除、吹气清除、吸附清除,存在缺陷:对附着力强的异物除不去,对物品表面存在损伤,易产生二次污染。
技术实现思路
1、本发明要解决的技术问题是提供一种半导体器件表面瑕疵异物检测处理方法及其系统,旨在解决现有方法对器件表面存在损伤,易产生二次污染的技术问题。
2、为解决上述技术问题,本发明第一方面提出了一种半导体器件表面瑕疵异物检测处理方法,该方法包括:
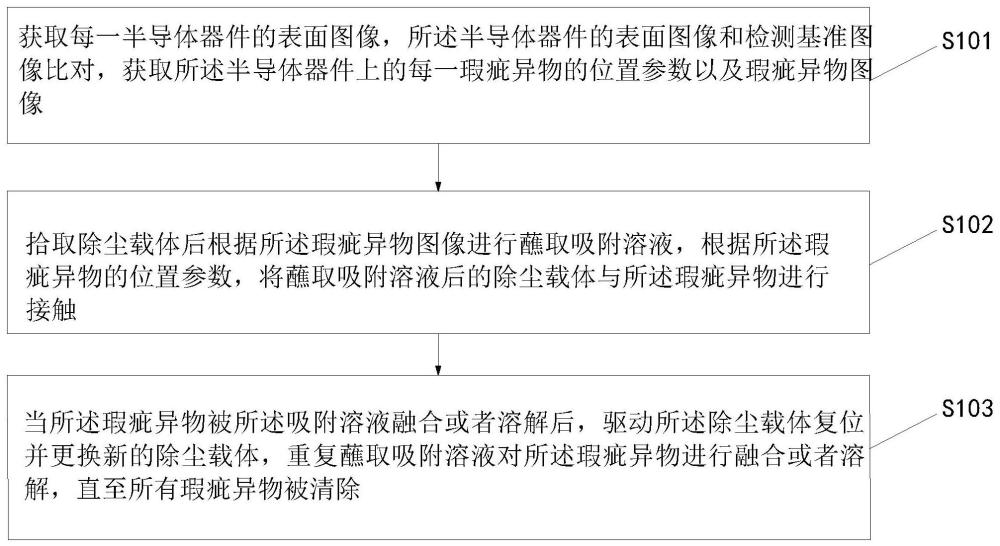
3、获取每一半导体器件的表面图像,所述半导体器件的表面图像和检测基准图像比对,获取所述半导体器件上的每一瑕疵异物的位置参数以及瑕疵异物图像;
4、拾取除尘载体后根据所述瑕疵异物图像进行蘸取吸附溶液,根据所述瑕疵异物的位置参数,将蘸取吸附溶液后的除尘载体与所述瑕疵异物进行接触;
5、当所述瑕疵异物被所述吸附溶液融合或者溶解后,驱动所述除尘载体复位并更换新的除尘载体,重复蘸取吸附溶液对所述瑕疵异物进行融合或者溶解,直至所有瑕疵异物被清除。
6、进一步的,所述半导体器件的表面图像和检测基准图像比对,获取所述半导体器件上的每一瑕疵异物的位置参数以及瑕疵异物图像具体包括:
7、对所述半导体器件的表面图像进行灰度化处理以及二值化处理得到对应的黑白图像,利用连通区域提取算法从所述黑白图像分别得到表面图像中的器件有效区域;
8、分别获取所述半导体器件的表面图像和检测基准图像的灰度直方图,根据各自灰度直方图中的最大值计算两个最大值的差值;将所述差值与所述器件有效区域内的每个像素的灰度值相加后得到比较值;
9、将所述比较值与所述检测基准图像对应位置的灰度值作对比,所述比较值与所述灰度值大于预设阈值的标记为瑕疵点像素;根据所述瑕疵点像素计算出每个瑕疵的连通区域面积大小,得到瑕疵异物图像。
10、具体的,所述分别获取所述半导体器件的表面图像和检测基准图像的灰度直方图,根据各自灰度直方图中的最大值计算两个最大值的差值;将所述差值与所述器件有效区域内的每个像素的灰度值相加后得到比较值包括:
11、计算获得所述半导体器件的表面图像的各个像素的灰度值形成的集合(假设为集合m)中的最大值(mmax),与检测基准图像的各个像素的灰度值形成的集合(假设为集合n)中的最大值(nmax),两者的差值(d=mmax–nmax);
12、将所述器件有效区域内的每个像素的灰度值(mi)加上d得到比较值m’i。
13、具体的,所述将所述比较值与所述检测基准图像对应位置的灰度值作对比,所述比较值与所述灰度值大于预设阈值的标记为瑕疵点像素;根据所述瑕疵点像素计算出每个瑕疵的连通区域面积大小,得到瑕疵异物图像包括:
14、将比较值m’i与所述检测基准图像对应位置的灰度值(ni)作比较,若差异(s=∣m’i–ni∣)大于预设阈值,则mi所代表的半导体器件的器件有效区域内的那个像素被标记为瑕疵点像素;
15、根据瑕疵点像素计算出每个瑕疵的连通区域面积大小,得到瑕疵异物图像。
16、进一步的,所述获取每一半导体器件的表面图像的步骤之前,所述方法包括:
17、设立xyz基准坐标系,多个所述半导体器件放置在一产品放置台,每一所述半导体器件在所述产品放置台上的位置为xsi,ysi,zsi;多个所述除尘载体放置在一载体放置台,每一所述除尘载体在所述载体放置台上的位置为xci,yci,zci;其中i是大于1的自然数。
18、进一步的,所述获取每一半导体器件的表面图像具体包括:
19、根据每一所述半导体器件在所述产品放置台上的位置为xsi,ysi,zsi,通过一ccd摄像头三轴移动模组达到每一所述半导体器件的正上方采集每一半导体器件的表面图像。
20、可选的,所述ccd摄像头三轴移动模组上还设置有测距传感器,将ccd摄像头下降到预设高度后采集所述半导体器件的表面图像。
21、进一步的,所述拾取除尘载体后根据所述瑕疵异物图像进行蘸取吸附溶液包括;
22、根据每一所述除尘载体在所述载体放置台上的位置为xci,yci,zci,通过除尘载体三轴移动模组从所述载体放置台上拾取除尘载体,并将所述除尘载体移送到容器位置xv,yv,zv,并将所述除尘载体向下移动蘸取吸附溶液。
23、具体的,所述除尘载体向下移动蘸取吸附溶液包括:
24、根据所述瑕疵异物图像中每个瑕疵的连通区域面积大小,计算所述除尘载体在所述容器内的下降高度以及停留时间。
25、具体的,所述将蘸取吸附溶液后的除尘载体与所述瑕疵异物进行接触包括:
26、根据所述瑕疵异物图像中每个瑕疵的连通区域面积大小,计算所述除尘载体的下降高度以及所述除尘载体末端的吸附溶液与所述瑕疵异物的接触时间。
27、本发明第二方面提出了一种半导体器件表面瑕疵异物检测处理系统,包括:
28、ccd摄像头三轴移动模组,用于移动到产品放置台上获取每一半导体器件的表面图像;
29、除尘载体三轴移动模组,用于从载体放置台上拾取除尘载体后根据所述瑕疵异物图像进行蘸取吸附溶液,根据所述瑕疵异物的位置参数,将蘸取吸附溶液后的除尘载体与所述瑕疵异物进行接触;当所述瑕疵异物被所述吸附溶液融合或者溶解后,驱动所述除尘载体复位并更换新的除尘载体,重复蘸取吸附溶液对所述瑕疵异物进行融合或者溶解,直至所有瑕疵异物被清除。
30、处理控制终端,用于接收所述半导体器件的表面图像并与检测基准图像比对,获取所述半导体器件上的每一瑕疵异物的位置参数以及瑕疵异物图像;并向所述ccd摄像头三轴移动模组、除尘载体三轴移动模组下发执行指令。
31、本发明技术方案的有益效果:
32、本发明实施例的半导体器件表面瑕疵异物检测处理方法及其系统,采用图像识别方式,快速识别半导体器件表面的瑕疵异物,计算每一瑕疵异物的位置信息、瑕疵异物图像,然后拾取除尘载体浸入装有特制化学液体(以下简称吸附溶液)的容器内蘸取吸附溶液,然后除尘载体在离开此容器内吸附溶液,在除尘载体的表面吸附溶液受重力与自身的张紧力作用形成水滴状,同时此水滴状吸附溶液紧密附着在除尘载体上。除尘载体将水滴状的吸附溶液与物品表面需要清除的瑕疵异物接触,待异物溶解到吸附溶液里后,除尘载体带着水滴状的吸附溶液离开物品表面,此时异物已经溶解在液体内一起带走,本技术采用溶解的方式,溶解后利用溶解液内部分子的张力将异物带走,既能清除物品表面异物,还能避免物品表面损伤或二次污染。
- 还没有人留言评论。精彩留言会获得点赞!