一种基于SMA的水下摄像头清理装置
本发明属于水下摄像头清洁,涉及一种基于sma的水下摄像头清理装置。
背景技术:
1、近年来,摄像头在水下机器人领域应用非常广泛。水下机器人需要下潜至数百米甚至上千米,摄像头的应用极大地延长了人眼的观察距离,它可以在复杂的水下环境下代替人工进行长时间观察,能够看到水下场景的实际发生的一切情况,并记录下水下的真实情况。然而,由于水下机器人工作环境苛刻,使得摄像头在水下工作时,往往受浮游生物的附着、泥沙附着的影响,出现摄像头镜头模糊甚至视野被遮挡的情况,导致无法获得清晰的影像。
2、传统的摄像头清理装置多采用动密封的方式,其通过旋转关节控制刷头臂,从而带动刷头对摄像头的镜头表面进行清洁,然而由于水下机器人工作在海水和江水中,水介质中的氯离子、微生物等产生的腐蚀作用以及硬质杂质如泥沙等产生的磨损,均会影响机械臂旋转关节处的密封性,使装置内部进水,导致电机损坏,清理装置失效。同时,由于传统的摄像头清理装置的刷头清洁力度是无法控制的,对于顽固的脏污,单一力度的清洁效果不佳。
技术实现思路
1、本发明的目的在于提出一种基于sma的水下摄像头清理装置,该装置采用sma丝作为清理装置的驱动单元,因而具有密封性好以及清洁效果好等优点。
2、本发明为了实现上述目的,采用如下技术方案:
3、一种基于sma的水下摄像头清理装置,包括:
4、控制单元、sma丝驱动单元以及胶条;
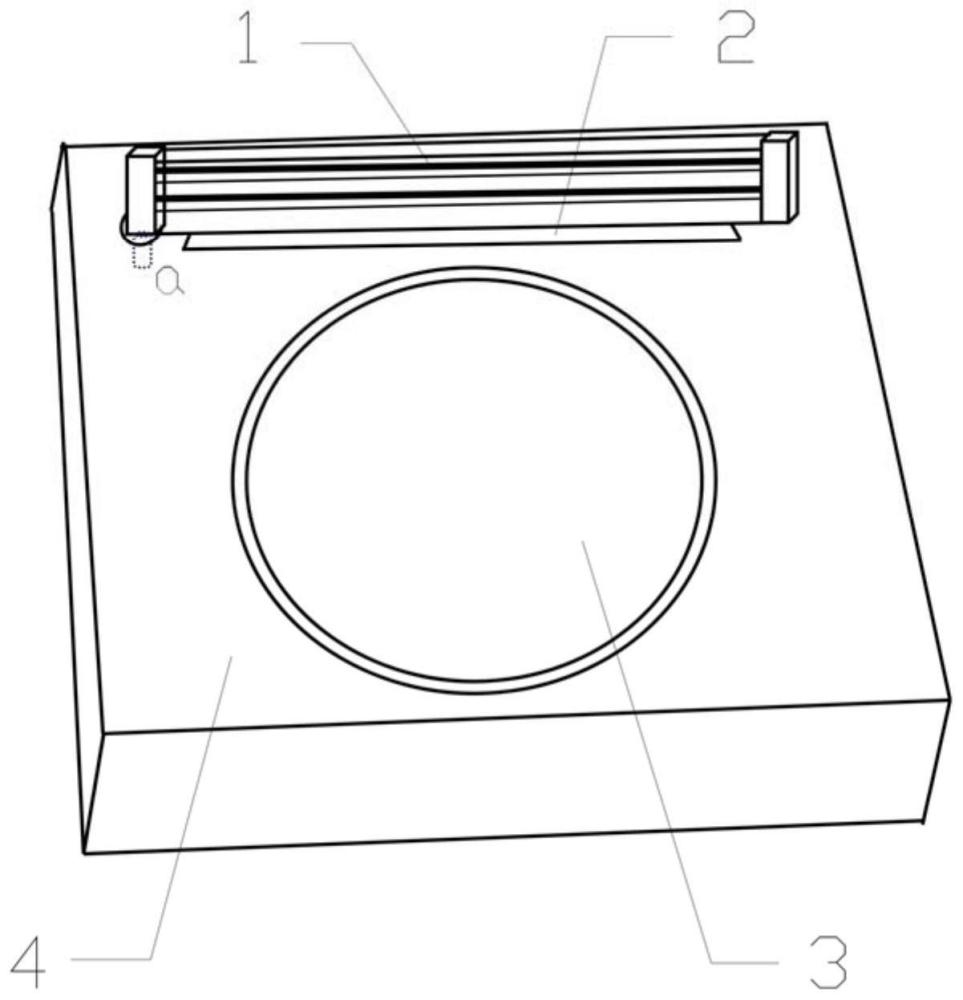
5、控制单元位于摄像头的控制箱内;sma丝驱动单元位于控制箱的外部,且设置于摄像头的一侧,胶条安装于sma丝驱动单元上且用于对摄像头表面进行清理;
6、控制单元与sma丝驱动单元相连,摄像头与控制单元相连;sma丝驱动单元的一端插入控制箱内,且sma丝驱动单元的插入端与控制箱之间为密封设置。
7、优选地,控制单元包括主控芯片以及sma丝驱动模块;
8、其中,sma丝驱动模块与sma丝驱动单元相连,且用于驱动sma丝驱动单元动作。
9、优选地,sma丝驱动单元有一组或两组;
10、当设置两组sma丝驱动单元时,两组sma丝驱动单元分别位于摄像头的一组相对侧,且两组sma丝驱动单元在控制箱上的插入端位于控制箱上的一组对角位置。
11、优选地,sma丝驱动单元为长条形,其包括pcb板、sma丝、高弹丝以及结构填充层;
12、其中,pcb板有两个,且为相对设置;
13、sma丝位于两个pcb板之间,pcb板用于为sma丝通电以及固定sma丝;高弹丝设置于两个pcb板之间,且用于实现sma丝驱动单元的恢复;
14、结构填充层用于对pcb板、sma丝以及高弹丝组成的整体进行封装。
15、优选地,结构填充层采用pdms填充层。
16、优选地,pcb板上引出有导线,用于将sma丝接入到控制单元上。
17、优选地,每个pcb板处均设置一个固定板;
18、其中,高弹丝的一端连接于一个固定板上,高弹丝的另一端连接于另一个固定板上。
19、优选地,sma丝在两个pcb板之间经过多次缠绕形成多列平行排布结构;
20、其中,任意相邻两列sma丝之间的结构填充层区域上,沿sma丝的长度方向均布置有多个贯穿该相邻两列sma丝之间的结构填充层区域的网孔结构。
21、优选地,两个pcb板中,有一个pcb板的端部设有延长部;
22、其中,该pcb板的延长部作为sma丝驱动单元的插入端插入控制箱内;在sma丝驱动单元的插入端与控制箱之间通过pdms进行密封设置。
23、优选地,高弹丝有多根,且在每列sma丝处均设置一根高弹丝;
24、在每列sma丝处安装的一根高弹丝,与对应的sma丝之间相互平行且间隔开。
25、本发明具有如下优点:
26、如上所述,本发明述及了一种基于sma的水下摄像头清理装置。该装置包括控制单元、sma丝驱动单元以及胶条,其中,控制单元位于摄像头的控制箱内。其中,sma驱动单元采用形状记忆合金(shape memory alloys,sma),利用sma丝通电受热弯曲的性质,通过对电信号的控制实现对sma弯曲程度的控制,本发明通过控制电信号的大小改变sma丝驱动单元的弯曲力度与角度,从而控制胶条的清洁力度与角度,因而能够很好地带动胶条清理水下摄像头的表面,同时省去了传统摄像头清理装置复杂的机械控制,明显降低了成本。另外,由于本发明所提装置中的sma丝驱动单元与控制箱之间采用静密封的方式,密封效果更好,避免了传统的摄像头清理装置由于长时间使用因动密封效果下降所导致的进水,保护了摄像头以及控制箱的内部电路。本发明设计结构简单、应用性强、且清理效果好。
技术特征:
1.一种基于sma的水下摄像头清理装置,其特征在于,
2.根据权利要求1所述的基于sma的水下摄像头清理装置,其特征在于,
3.根据权利要求1所述的基于sma的水下摄像头清理装置,其特征在于,
4.根据权利要求1所述的基于sma的水下摄像头清理装置,其特征在于,
5.根据权利要求4所述的基于sma的水下摄像头清理装置,其特征在于,
6.根据权利要求4所述的基于sma的水下摄像头清理装置,其特征在于,
7.根据权利要求4所述的基于sma的水下摄像头清理装置,其特征在于,
8.根据权利要求4所述的基于sma的水下摄像头清理装置,其特征在于,
9.根据权利要求4所述的基于sma的水下摄像头清理装置,其特征在于,
10.根据权利要求9所述的基于sma的水下摄像头清理装置,其特征在于,
技术总结
本发明属于水下摄像头清洁技术领域,具体公开了一种基于SMA的水下摄像头清理装置,其包括控制单元、SMA丝驱动单元以及胶条,其中,控制单元位于摄像头的控制箱内。其中,SMA驱动单元采用形状记忆合金,利用SMA丝通电受热弯曲的性质,通过对电信号的控制实现对SMA弯曲程度的控制,本发明通过控制电信号的大小改变SMA弯曲力度与角度,从而控制胶条的清洁力度与角度,进而很好地带动胶条清理水下摄像头的表面。同时,由于本发明装置中的SMA丝驱动单元与控制箱之间采用静密封的方式,密封效果更好,避免了传统的摄像头清理装置由于长时间使用因动密封效果下降所导致的进水,保护了摄像头和内部电路。本发明设计结构简单、应用性强、效果好、成本低。
技术研发人员:李俊漾,温琦,杨华,胡奇强,高立波,海振银,徐爽,李辽,黄利晓
受保护的技术使用者:中国海洋大学
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!