一种混合装置的制作方法
1.本发明属于药物溶解技术领域,具体涉及一种将西林瓶内的药物与母液进行摇匀混合从而实现药物完全溶解的混合装置。
背景技术:
2.目前,医院中配置药物的方式主要是通过医护人员手工操作,这种手工配置药物的方式,需要医护人员手动操作注射器进行药物的抽吸,在西林瓶内药物的配置过程中,通常需要先将母液注射入西林瓶中,然后进行多次摇晃以使得西林瓶中粉末状的药物与母液进行摇匀混合,从而实现药物的溶解,然后再利用注射器将溶解后的药液抽吸出来,注射到吊瓶中进行使用或者直接进行打针操作。
3.上述粉末状的药物与母液的混合过程需要医护人员进行手工摇匀,医护人员工作强度高,尤其是在大型医院的医护站,每天需要进行非常多的西林瓶的药物配置;此外有的药物还存在一定的毒性,对医护人员的安全也有着不小的危险。
4.随着技术的发展,市面上也出现了一些摇匀装置,以实现的自动化配药过程,例如中国专利201210322691.8公开的一种用于配药系统中的药液输入摇匀装置,再例如中国专利201820811833.x公开的一种医院中心配药室用配药振荡装置。
5.在同时进行多个西林瓶振动摇匀时,为了使药物混合的充分完全,需要增大振动幅度,现有技术中存在振动摇匀过程中西林瓶脱离的风险,因此,需要进行改进。
技术实现要素:
6.针对现有技术的缺陷,本发明提供了一种混合装置,具有西林瓶的夹持效果好、摇匀稳定性高的优点。
7.为了实现上述目的,本发明提供了一种混合装置,用于自动化配药系统中进行药物的溶解与摇匀,其包括夹头式机械手和振动器,夹头式机械手用于对西林瓶进行定位和夹持,振动器用于驱动夹头式机械手振动,将被夹头式机械手所夹持西林瓶内的药物与母液进行摇匀混合从而实现药物的溶解,振动器具有振动平台,夹头式机械手包括基座和多个夹头,基座设置于振动平台上,在基座上设有多个用于西林瓶穿过的通孔,夹头对应于通孔设置于基座上;夹头包括:用于夹持西林瓶的两个或两个以上的抓手构件;用于进行抓手构件预夹紧的拉伸弹簧;用于驱动抓手构件进行位置切换的执行臂;和用于驱动不同的执行臂进行同步运动的齿轮传动组;抓手构件具有夹持部、连接部和作用部,在抓手构件上设有回转轴,回转轴位于夹持部和连接部之间,作用部设置于夹持部上;拉伸弹簧的一端连接基座,拉伸弹簧的另一端连接连接部;执行臂与抓手构件一一对应,其具有夹紧位置、中间位置和放松位置,执行臂包括
呈“7”形的第一臂和第二臂,执行臂切换至夹紧位置过程中,第一臂正向转动并抵接在夹持部上,驱动夹持部围绕回转轴进行同步的正向转动以夹紧西林瓶,执行臂切换至放松位置过程中,第二臂反向转动并抵接在作用部上,驱动夹持部围绕回转轴进行同步的反向转动以放松西林瓶,执行臂切换至中间位置时,第一臂与夹持部相分离且第二臂与作用部相分离,利用拉伸弹簧,抓手构件对西林瓶进行预夹紧;齿轮传动组包括若干互相啮合的传动齿轮,执行臂设置于不同的传动齿轮上并与传动齿轮同步转动,利用不同的传动齿轮的同步转动,驱动执行臂在夹紧位置、中间位置和放松位置之间进行切换,以执行西林瓶的夹紧、预装和松开操作。
8.作为本发明的另一种具体实施方式,混合装置还包括底基板,振动器进一步包括柔性支架组件和振动电机及其输出组件,振动电机及其输出组件设置于振动平台上,振动电机及其输出组件用于进行振动平台的振动,柔性支架组件包括多个弹簧支架,振动平台通过多个弹簧支架设置于底基板上,其中弹簧支架包括:下定位连接筒,其固定设置于底基板上,下定位连接筒具有开口向上的下连接槽;上定位连接筒,其固定设置于振动平台上,上定位连接筒具有开口向下的上连接槽;振动弹簧,振动弹簧的一端位于上连接槽内,振动弹簧的另一端位于下连接槽内,其中上定位连接筒与下定位连接筒之间不接触。
9.作为本发明的另一种具体实施方式,柔性支架组件还包括多个用于维持振动稳定性的缓冲支架,缓冲支架包括:下定位支架,其固定设置于底基板上;上定位支架,其固定设置于振动平台上;缓冲器,其分别与上定位支架和下定位支架相连接。
10.作为本发明的另一种具体实施方式,基座可拆卸地连接在振动平台上。
11.作为本发明的另一种具体实施方式,作用部至少设有向外凸出的支撑臂和设置于支撑臂上的止挡柱,支撑臂与夹持部固定连接,第二臂设有向内凹陷的弧形槽,第二臂反向转动时,弧形槽转动至与止挡柱相抵接,通过止挡柱带动支撑臂、夹持部进行同步的反向转动以放松西林瓶。
12.作为本发明的另一种具体实施方式,多个夹头呈横纵阵列分布,相邻夹头的齿轮传动组内的传动齿轮互相啮合以进行动力传递。
13.作为本发明的另一种具体实施方式,若干传动齿轮均相同。
14.作为本发明的另一种具体实施方式,夹头包括三个抓手构件,三个抓手构件以通孔的轴线为圆心阵列分布。
15.作为本发明的另一种具体实施方式,夹头式机械手进一步包括位置旋钮和主动齿轮,主动齿轮与其中一个夹头的齿轮传动组内的至少一个传动齿轮相啮合,位置旋钮与主动齿轮之间固定连接以进行同步转动。
16.作为本发明的另一种具体实施方式,夹头式机械手还包括切换旋钮和用于保持主动齿轮角度姿态的两个防反锁定器,两个防反锁定器分别用于正向锁定主动齿轮和反向锁定主动齿轮,切换旋钮用于切换两个防反锁定器的位置,其设置于基座上,防反锁定器包括:
固定块,设置于基座上;防反挡板,防反挡板的一端转动连接在基座上,防反挡板的另一端设有斜齿,斜齿能与主动齿轮相咬合;复位弹簧,复位弹簧的一端连接在固定块上,复位弹簧的另一端连接在防反挡板的中部;通过转动切换旋钮,使切换旋钮与防反挡板之间抵接,从而使斜齿与主动齿轮分离;和,使切换旋钮与防反挡板之间分离,利用复位弹簧,斜齿能与主动齿轮相咬合。
17.本发明具备以下有益效果:本发明通过夹头式机械手对批量的西林瓶进行有效夹持,具有西林瓶夹持效果好的优点,利用振动器进行振动,促进西林瓶内的药物与母液进行摇匀混合从而实现药物的充分溶解,具有西林瓶中药物溶解均匀性好、摇匀稳定性高的优点,同时提高了配药的效率,大大降低了医护人员的劳动强度。
18.下面结合附图对本发明作进一步的详细说明。
附图说明
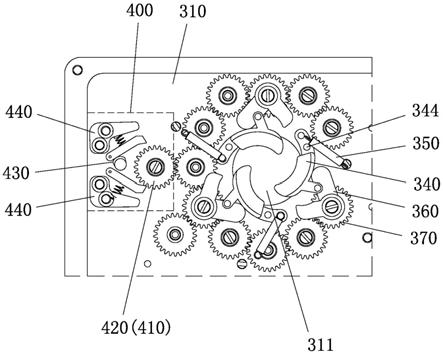
19.图1是本发明实施例1自动化配药系统的结构示意图;图2是本发明实施例1中弹簧支架的结构示意图;图3是本发明实施例1中缓冲支架的结构示意图;图4是本发明实施例1夹头式机械手的结构示意图;图5是本发明实施例1多个夹头的分布示意图;图6是本发明实施例1单个夹头夹紧西林瓶的示意图;图7是本发明实施例1单个夹头放松西林瓶的示意图;图8是本发明实施例1中抓手构件的结构示意图;图9是本发明实施例1中执行臂的结构示意图。
具体实施方式
20.为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附图和具体实施方式对本发明进行进一步的详细描述。需要说明的是,在不冲突的情况下,本技术的实施例及实施例中的特征可以相互组合。
21.在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用其他不同于在此描述的其他方式来实施,因此,本发明的保护范围并不限于下面公开的具体实施例的限制。
22.实施例1本发明提供了一种混合装置,用于自动化配药系统中进行药物的溶解与摇匀,如图1所示,自动化配药系统还包括用于进行夹持及移动分配母液用软管针头的三轴运动装置、用于进行抽吸母液的蠕动泵装置和操作屏装置,本实施例中不再对上述三轴运动装置、蠕动泵装置和操作屏装置等进行展开介绍。
23.混合装置包括底基座100、振动器200和夹头式机械手300,底基座100作为底座进行使用,夹头式机械手300用于对西林瓶进行定位和夹持,振动器200用于驱动夹头式机械
手300振动,将被夹头式机械手300所夹持西林瓶内的药物与母液进行摇匀混合从而实现药物的溶解。
24.如图1-3所示,振动器200包括振动平台210、振动电机及其输出组件220和柔性支架组件230。
25.振动平台210用作支撑夹头式机械手300,并将振动传递给夹头式机械手300;振动平台210通过柔性支架组件230设置在底基座100上,其中柔性支架组件230包括四个弹簧支架231和四个缓冲支架232。
26.其中振动平台210上设有矩形的底壁211,四个弹簧支架231呈矩形状分布在该底壁211的四个角部,如图2所示,底壁211与振动平台210之间可以是固定连接,也可以是浮动连接,本实施例中不进行限定;弹簧支架231包括下定位连接筒2311、上定位连接筒2312和振动弹簧2313;下定位连接筒2311竖直固定设置于底基座100上,其中下定位连接筒2311具有开口向上的下连接槽;上定位连接筒2312竖直固定设置于振动平台210上,其中上定位连接筒2312具有开口向下的上连接槽;振动弹簧2313的一端位于上连接槽内,振动弹簧2313的另一端位于下连接槽内,其中上定位连接筒2312与下定位连接筒2311之间不接触,利用振动弹簧2313,振动平台210能够在支撑于底基座100的同时实现振动。
27.进一步的,为了防止振动弹簧2313发生侧翻,还可以在设有支撑连杆2314,支撑连杆2314的一端连接在下定位连接筒2311上,支撑连杆2314的另一端连接在上定位连接筒2312上,其中支撑连杆例如可以产生小范围的晃动,例如支撑连杆与下定位连接筒2311或上定位连接筒2312之间孔轴间隙配合,以实现振动平台210的立体振动;当然,支撑连杆也可以是固定式连杆,即支撑连杆与下定位连接筒2311和上定位连接筒2312之间固定配合,再通过其他活动配合实现振动平台210的立体振动,例如振动平台210包括活动配合的上振动平台210和下振动平台210的形式,这里不再展开赘述。
28.四个缓冲支架232两两一组位于底壁211的两个侧边上,在其他示例中,可以根据其结构设计进行适应性调整,缓冲支架232用于维持振动稳定性,尤其是可以防止振动开启初期的不规则振动,如图3所示,缓冲支架232包括下定位支架2321、上定位支架2322和缓冲器2323;其中下定位支架2321固定设置于底基座100上,上定位支架2322固定设置于振动平台210上,缓冲器2323分别与上定位支架2322和下定位支架2321相连接,缓冲器2323例如为机械式弹簧缓冲器。
29.本实施例中通过弹簧支架231和缓冲支架232,可以有效实现振动平台210振动的稳定性,有利于摇匀过程。
30.振动电机及其输出组件220设置于振动平台210上,通过振动电机的启动实现振动平台210的振动,振动电机及其输出组件220例如为凸轮式振动机构,本实施例中不对其结构进行限定,其他实现振动的机构亦可。
31.如图4-9所示,夹头式机械手300包括基座310和多个夹头320,基座310设置于振动平台210上,在基座310上设有多个用于西林瓶穿过的通孔311,夹头对应于通孔311设置于
基座310上,为了结构的整洁性,还具有与基座310相配合的上盖330,基座310与上盖33之间互相连接并呈矩形盒状,进而将多个夹头320进行隐藏,如图4-5所示,具体的,基座310可拆卸地连接在振动平台210上,实现夹头式机械手300整体的拆装,以便于上药操作。
32.本实施例中的夹头320包括三个抓手构件340、与抓手构件340一一对应的拉伸弹簧350和执行臂360、与执行臂360对应的齿轮传动组370;三个抓手构件340以通孔311的轴线为圆心阵列分布,三个抓手构件340配合以进行夹持或放松西林瓶,如图8所示,抓手构件340具有夹持部341、连接部342和作用部343,在抓手构件340上设有回转轴344,回转轴344位于夹持部341和连接部342之间,作用部343设置于夹持部341上。
33.其中回转轴344也可以设置于基座310上,相应的,在抓手构件340相应位置设置于回转轴344配合的连接孔345。
34.进一步的,回转轴344靠近连接部342,进而实现更为明显的杠杆效应,即连接部342在较小范围内的转动带动夹持部341在较大范围的转动。
35.拉伸弹簧350用于进行抓手构件340的预夹紧,以实现对西林瓶的预夹紧,其中5-7所示,拉伸弹簧350的一端连接基座310,拉伸弹簧350的另一端与连接部342相连接;执行臂360用于驱动抓手构件340的位置切换,如图9所示,执行臂360包括呈“7”形的第一臂361和第二臂362;具体的,执行臂360具有夹紧位置、中间位置和放松位置,如图6所示,执行臂360切换至夹紧位置过程中,第一臂361正向转动并抵接在夹持部341上,驱动夹持部341围绕回转轴344进行同步的正向转动以夹紧西林瓶,执行臂360切换至放松位置过程中,如图7所示,第二臂362反向转动并抵接在作用部343上,驱动夹持部341围绕回转轴344进行同步的反向转动以放松西林瓶,执行臂360切换至中间位置时,第一臂361与夹持部341相分离且第二臂362与作用部343相分离,此时西林瓶可以顶开抓手构件340以实现上药操作,利用拉伸弹簧350,抓手构件340对西林瓶进行预夹紧;相应的,其中为了便于对西林瓶进行预夹紧,在夹持部341上设有弧形的引导面结构346。
36.其中,本实施例中的作用部343设有向外凸出的支撑臂3431和设置于支撑臂3431上的止挡柱3432,支撑臂3431与夹持部341固定连接,第二臂362设有向内凹陷的弧形槽3621,第二臂362反向转动时,弧形槽3621转动至与止挡柱3432相抵接,通过止挡柱3432带动支撑臂3431、夹持部341进行同步的反向转动以放松西林瓶,如图7所示。
37.齿轮传动组370用于驱动不同的执行臂360进行同步运动,齿轮传动组370包括若干互相啮合的传动齿轮371,若干传动齿轮371均相同,具体为若干传动齿轮371的类型、齿数等规格完全相同,以便于同步传递;执行臂360设置于传动齿轮371上并与传动齿轮371同步转动,利用不同的传动齿轮371的同步转动,驱动执行臂360在夹紧位置、中间位置和放松位置之间进行切换,以执行西林瓶的夹紧、预装和松开操作。
38.本实施例中的多个夹头320呈横纵阵列分布,如图4-5所示处的十六个夹头320呈4x4阵列分布,相邻的夹头320中的齿轮传动组370中的传动齿轮371互相啮合以进行动力传递,如图5所示,其中不同的齿轮传动组370之间可以根据其位置变化适应性调整用于进行配合的传动齿轮371的齿数,这里不再限定不同齿轮传动组370中的传动齿轮371的啮合位
置。
39.在本发明的优选实施例中,为了便于进行西林瓶的批量上药操作还设置了手动操控装置400,如图6-7所示,手动操控装置400包括位置旋钮410、主动齿轮420、切换旋钮430和用于保持主动齿轮420角度姿态的两个防反锁定器440;主动齿轮420与其中一个夹头320的齿轮传动组370内的一个传动齿轮371相啮合,位置旋钮410与主动齿轮420之间固定连接以进行同步转动。
40.两个防反锁定器440分别用于正向锁定主动齿轮420和反向锁定主动齿轮420,切换旋钮430用于切换两个防反锁定器440的位置,其设置于基座310上,防反锁定器440包括固定块441、防反挡板442和复位弹簧443;如图5所示,固定块441设置于基座310上,防反挡板442的一端转动连接在基座310上,防反挡板442的另一端设有斜齿444,斜齿444能与主动齿轮420相咬合;复位弹簧443的一端连接在固定块441上,复位弹簧443的另一端连接在防反挡板442的中部;通过转动切换旋钮430,使切换旋钮430与防反挡板442之间抵接,从而使斜齿444与主动齿轮420分离;和,使切换旋钮430与防反挡板442之间分离,利用复位弹簧443,斜齿444能与主动齿轮420相咬合,如图5-6所示。
41.本实施例中所提供的混合装置,可以进行西林瓶的批量上药,上药效率高,通过夹头式机械手300对批量的西林瓶进行有效夹持,利用振动器200进行振动,促进西林瓶内的药物与母液进行摇匀混合从而实现药物的充分溶解。
42.虽然本发明以较佳实施例揭露如上,但并非用以限定本发明实施的范围。任何本领域的普通技术人员,在不脱离本发明的发明范围内,当可作些许的改进,即凡是依照本发明所做的同等改进,应为本发明的范围所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1