一种四摆臂超声雾化旋转涂膜装置的制作方法
1.本实用新型涉及一种涂膜装置,特别是涉及一种四摆臂超声雾化旋转涂膜装置。
背景技术:
2.目前,超声雾化设备的功能都是一次涂覆一个种类的薄膜,若要在同一基片上涂覆多个种类的薄膜,则需要不断更换薄膜液体并清洗超声喷头,既增加了工作时间和工序,又使多层喷涂工作变得繁琐。
3.要实现一次喷涂多种液体,并能在圆周上控制喷涂的面积和均匀性,同时控制单位时间内液体的喷涂量,就需要一种多工位、喷头可呈弧形摆动、底部吸盘能够旋转、工作过程全自动控制的超声雾化喷涂设备。
技术实现要素:
4.本实用新型的目的在于提供一种四摆臂超声雾化旋转涂膜装置,本实用新型利用同一种超声装置将一种或最多四种液体同时雾化并自动喷涂在一定尺寸基片表面形成薄膜,喷涂过程中喷头摆臂的摆动角度及液体的喷涂速度可自动控制,实现整个喷涂过程的自动化。
5.本实用新型的目的是通过以下技术方案实现的:
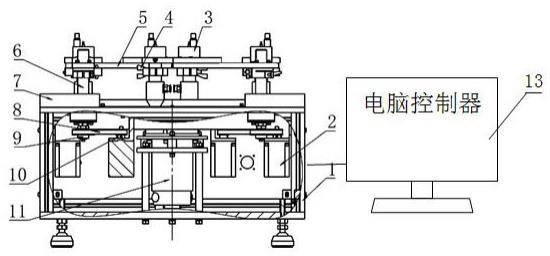
6.一种四摆臂超声雾化旋转涂膜装置,所述装置包括壳体、摆臂电机、雾化喷头、锁紧螺母、摆臂、摆臂轴、固定座、同步带、大同步带轮、小同步带轮、主轴电机、真空吸盘、电脑控制器;摆臂通过摆臂轴固定座固定在壳体上,电脑控制器与四摆臂超声雾化装置通过连接线相连接;大同步带轮与小同步带轮通过同步带与摆臂轴相连接,雾化喷头通过蝶形雾化喷头锁紧螺母将雾化喷头固定在可伸缩摆臂上;摆臂轴通过摆臂固定座将摆臂固定在壳体上;主轴电机固定在壳体内;真空吸盘通过吸盘自带卡槽连接在主轴电机上。
7.所述的一种四摆臂超声雾化旋转涂膜装置,所述摆臂电机通过摆臂电机固定座固定在壳体上部。
8.所述的一种四摆臂超声雾化旋转涂膜装置,所述摆臂轴通过同步带、大同步带轮和小同步带轮与摆臂电机相连。
9.所述的一种四摆臂超声雾化旋转涂膜装置,所述雾化喷头通过蝶形雾化喷头锁紧螺母固定在可伸缩摆臂端部。
10.所述的一种四摆臂超声雾化旋转涂膜装置,所述可伸缩摆臂固定在摆臂轴顶端。
11.所述的一种四摆臂超声雾化旋转涂膜装置,所述主轴电机固定在壳体底部。
12.本实用新型的优点与效果是:
13.1.本实用新型同时喷涂一种或最多四种液体对样品进行涂膜或清洗,喷涂时可以通过调整摆臂长度和角度来控制喷涂面积。配合真空吸盘的旋转,使喷涂后的薄膜更均匀,所有摆臂的摆动角度和液体的喷涂速度都可用电脑进行自动控制。
14.2.本实用新型在设备壳体顶部配置四个雾化喷头摆臂,每个摆臂端配置一个雾化
喷头,四个喷头可单独使用也可同时使用,可进行最多四种薄膜的喷涂,使同一工序中多种类薄膜喷涂工作不再繁琐,提高了工作效率。
15.3.本实用新型喷涂过程中四摆臂可设置一定角度进行摆动,同时配合底部真空吸盘的旋转,提高了喷涂薄膜的均匀性。所有工序的参数通过电脑控制器进行设置并自动控制,实现了多层薄膜喷涂的智能化控制。
附图说明
16.图1为本实用新型整体结构示意图;
17.图2为图1的俯视图。
18.图中部件:壳体1、摆臂电机2、雾化喷头3、锁紧螺母4、摆臂5、摆臂轴6、固定座7、同步带8、大同步带轮9、小同步带轮10、主轴电机11、真空吸盘12、电脑控制器13。
具体实施方式
19.下面结合附图所示实施例对本实用新型进行详细说明。
20.本实用新型四摆臂超声雾化装置,包括电脑控制器、壳体、主轴电机、真空吸盘、摆臂电机、同步带、大同步带轮、小同步带轮、摆臂轴、摆臂固定座、可伸缩摆臂、雾化喷头、蝶形雾化喷头锁紧螺母;主轴电机固定在壳体上,真空吸盘通过吸盘自带卡槽连接在主轴电机上,摆臂电机通过摆臂电机固定座固定在壳体上部,摆臂轴通过同步带、大同步带轮和小同步带轮与摆臂电机相连,雾化喷头固定在可伸缩摆臂上,超声雾化设备通过连接线与电脑控制器相连。
21.摆臂组件:雾化喷头3通过蝶形雾化喷头锁紧螺母4固定在可伸缩摆臂5端部,可伸缩摆臂5固定在摆臂轴6顶端,摆臂轴6通过摆臂轴固定座7固定在壳体1上部与摆臂电机2相连,大同步带轮9和小同步带轮10通过同步带8与摆臂轴相连。
22.壳体组件:真空吸盘12通过吸盘自带卡槽与主轴电机11相连,主轴电机11固定在壳体1底部。
23.控制系统:电脑控制器13控制整个涂膜系统。
24.使用过程:打开电脑控制器13和超声雾化旋转涂膜系统主机的电源,在电脑控制器上设置好可伸缩摆臂5的摆动角度和摆动速度,可伸缩摆臂5的长度,雾化喷头3的液体喷涂速度和流量大小;设置好要运行的摆臂数量及摆臂运行的先后顺序;设置好真空吸盘12的旋转速度及涂膜时间;将基片放置于真空吸盘12上,开启设备的真空泵使基片固定在真空吸盘上;启动设备的运行程序,使设备按所设定的参数进行涂膜,当设备涂膜结束后设备和程序停止运行,四个摆臂将自动恢复到初始位置,真空泵继续工作一段时间再自动停止,防止真空吸盘12上的基片飞片造成样件损坏,至此整个涂膜过程结束。
技术特征:
1.一种四摆臂超声雾化旋转涂膜装置,其特征在于,所述装置包括壳体(1)、摆臂电机(2)、雾化喷头(3)、锁紧螺母(4)、摆臂(5)、摆臂轴(6)、固定座(7)、同步带(8)、大同步带轮(9)、小同步带轮(10)、主轴电机(11)、真空吸盘(12)、电脑控制器(13);摆臂通过摆臂轴固定座固定在壳体上,电脑控制器与四摆臂超声雾化装置通过连接线相连接;大同步带轮(9)与小同步带轮(10)通过同步带(8)与摆臂轴(6)相连接,雾化喷头(3)通过蝶形雾化喷头锁紧螺母(4)将雾化喷头(3)固定在可伸缩摆臂(5)上;摆臂轴(6)通过摆臂固定座(7)将摆臂固定在壳体上;主轴电机(11)固定在壳体(1)内;真空吸盘(12)通过吸盘自带卡槽连接在主轴电机(11)上。2.根据权利要求1所述的一种四摆臂超声雾化旋转涂膜装置,其特征在于,所述摆臂电机(2)通过固定座固定在壳体(1)上部。3.根据权利要求1所述的一种四摆臂超声雾化旋转涂膜装置,其特征在于,所述摆臂轴(6)通过同步带(8)、大同步带轮(9)和小同步带轮(10)与摆臂电机(2)相连。4.根据权利要求1所述的一种四摆臂超声雾化旋转涂膜装置,其特征在于,所述雾化喷头(3)通过蝶形雾化喷头锁紧螺母(4)固定在可伸缩摆臂(5)端部。5.根据权利要求1所述的一种四摆臂超声雾化旋转涂膜装置,其特征在于,所述可伸缩摆臂(5)固定在摆臂轴(6)顶端。6.根据权利要求1所述的一种四摆臂超声雾化旋转涂膜装置,其特征在于,所述主轴电机(11)固定在壳体(1)底部。
技术总结
一种四摆臂超声雾化旋转涂膜装置,涉及一种涂膜装置,摆臂通过摆臂轴固定座固定在壳体上,电脑控制器与四摆臂超声雾化装置通过连接线相连接;大同步带轮(9)与小同步带轮(10)通过同步带(8)与摆臂轴(6)相连接,雾化喷头(3)通过蝶形雾化喷头锁紧螺母(4)将雾化喷头(3)固定在可伸缩摆臂(5)上;摆臂轴(6)通过摆臂固定座(7)将摆臂固定在壳体上;主轴电机(11)固定在壳体(1)内;真空吸盘(12)通过吸盘自带卡槽连接在主轴电机(11)上。喷涂过程中喷头摆臂的摆动角度及液体的喷涂速度可自动控制,实现整个喷涂过程的自动化。整个喷涂过程的自动化。整个喷涂过程的自动化。
技术研发人员:赵闯 关洪魏 周大为
受保护的技术使用者:沈阳科晶自动化设备有限公司
技术研发日:2021.04.19
技术公布日:2021/11/24
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1