一种智能调平的便携式工作台
1.本实用新型涉及一种智能调平的便携式工作台,尤其涉及对平衡精度要求较高且有垂直升降需求的实验工作台构建与应用。
背景技术:
2.随着科学技术的发展,高精度的实验仪器对于实验环境的要求随着提升,精密、可调节、稳定的工作台对于实验的顺利完成至关重要,如果实验工作台达不到要求,会造成实验误差,测得的数据可靠性低。
3.目前常见的小型手动升降台螺杆多为手动调节,通过控制左右两侧铰链结构的松紧程度来控制升降,但是当较重的仪器设备放置在上面板时,多铰支点以及上面板悬空会导致重心偏移,上面板不能保持水平,此时整个升降台处于不稳定平衡状态,外界稍微施加外力,整个升降台又会发生变形。此外,手动调整升降台的操作还存在着较为麻烦,不容易调平,工作台的可调节高度普遍不高,不能适应各种高度的实验需要。
4.现有工作台具有较高水平精度的,多为室内大型工作台,不易携带和移动,但是有一些实验需要在移动工作台完成测量,甚至有一些实验需要在室外进行,同时需要对工作台进行调平。
5.现有的工作台多需要进行人工手动调平和手动进行升降,调平和升降过程中会产生一些误差,而且当重量较重的仪器放置在工作台上时,升降台会出现局部变形,需要增大刚度或者其他措施进行重新配准调平。
技术实现要素:
6.本专利所要解决的技术问题是针对背景技术的不足提供了一种智能调平的便携式工作台,为平衡精度要求较高且有垂直升降需求的仪器提供一种稳定且可以智能调平、可调节高度范围较大的实验工作台。
7.本专利为解决上述技术问题采用以下技术方案:
8.一种智能调平的便携式工作台,包括三脚支撑架、调平板、下支撑板、测距装置、上支撑板、智能控制器;
9.所述调平板分为上调平板与下调平板,所述上调平板通过三个调平装置与下调平板连接;所述三脚支撑架包括三个可调节长短的伸缩支撑腿,所述三个伸缩支撑腿铰接在下调平板的底面,且每个伸缩支撑腿旁分别设有对伸缩支撑腿的张开极限位置限制的限位部;所述下支撑板设于上调平板上表面的中间位置,所述下支撑板上设有水准泡,所述上支撑板底面四个角通过4个电动推杆与下支撑板连接,所述测距装置包括4个激光测距仪,所述4个激光测距仪分别设于4个电动推杆旁,所述4个激光测距仪处于同一水平高度,且各个激光测距仪的激光口对准上支撑板的底面,所述智能控制器设于下支撑板上,所述4个激光测距仪、4个电动推杆均通过数据线与智能控制器连接。
10.所述调平装置包括调平螺丝、调节螺母和限位螺母,所述上调平板上设有三个螺
孔,下调平板上设有三个通孔,上调平板上的三个螺孔与下调平板上的三个通孔一一对应,所述调平螺丝依次穿过上调平板螺孔、调节螺母、下调平板通孔和限位螺母。
11.所述伸缩支撑腿包括固定支撑腿与设于固定支撑腿内的伸缩支撑脚,所述固定支撑腿的侧壁上设置有至少一个螺孔,每个螺孔配合安装有高度调节螺丝,且高度调节螺丝的顶部穿过螺孔与伸缩支撑脚的外壁相抵。
12.所述上调平板上设有4个水准泡。
13.所述智能控制器包括控制器外壳、距离判别模块、按键模块、电源、单片机,所述距离判别模块和按键模块设于控制器外壳的前壁面上,所述单片机、电源设于控制器外壳内,且单片机与电源连接,所述距离判别模块通过数据线分别与4个激光测距仪相连,所述单片机通过数据线分别与距离判别模块、按键模块、4个电动推杆连接。
14.所述的电源为可拆卸充电锂电池。
15.所述下支撑板通过连接螺丝与上调平板活动连接。
16.本专利采用以上技术方案与现有技术相比,具有以下技术效果:
17.1、三脚支撑架的结构比较稳固,自由调节每个支撑腿的长短,可以适应各种不同的地形条件,甚至可以室外使用,且可以调节的高度范围较大,适应各种不同的实验需求,为实验设备提供良好的工作环境。
18.2、三脚支撑架与调平板有两步调平方式,且调平过程都比较方便,易于操作,四个电动推杆可以分别伸缩,进行局部微调,提高调平精度,为平衡精度要求较高的仪器提供了更高的水平精度。
19.3、智能控制器提供一种自动化控制方式,在输入升降高度后,根据激光测距仪的数据调整每个电动推杆的高度,进而实现智能化的平衡升降。
20.4、对于支撑板上放置的重量较重的仪器,影响到局部平衡时,通过调节、调平螺丝、手动或者自动调节电动推杆可以实现再次平衡,减少了仪器掉落的风险,增加了工作台的稳定性。
附图说明
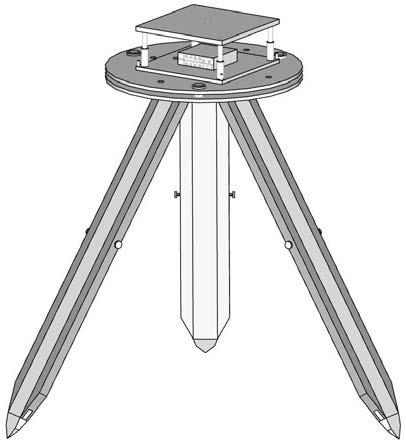
21.图1是一种智能调平的便携式工作台三维示意图;
22.图2是一种智能调平的便携式工作台正视图;
23.图3是一种智能调平的便携式工作台俯视图;
24.图4是一种智能调平的便携式工作台的局部正视图;
25.图5是一种智能调平的便携式工作台中下支撑板的俯视图;
26.图6为一种智能调平的便携式工作台中上下调平板连接方式示意图;
27.图中,(1
‑
1、1
‑
2、1
‑
3)为固定支撑腿;(2
‑
1、2
‑
2、2
‑
3、2
‑
4、2
‑
5、2
‑
6)为高度调节螺丝;(3
‑
1、3
‑
2、3
‑
3)为伸缩支撑脚;4为下调平板;5为上调平板;(6
‑
1、6
‑
2、6
‑
3)为调平螺丝;7为下支撑板;8为上支撑板;(9
‑
1、9
‑
2、9
‑
3、9
‑
4)为电动推杆;(10
‑
1、10
‑
2、10
‑
3、10
‑
4)为激光测距仪;11为智能控制器;(13
‑
1、13
‑
2、13
‑
3、13
‑
4)为辅助水准泡;14为主水准泡;15为显示界面;16为输入窗口;17为选择窗口;18为调节螺母;19为限位螺母。
具体实施方式
28.下面结合附图对本专利的技术方案做进一步的详细说明:
29.一种智能调平的便携式工作台,如图1
‑
6所示,包括固定支撑腿(1
‑
1、1
‑
2、1
‑
3)与设于固定支撑腿内的伸缩支撑脚(3
‑
1、3
‑
2、3
‑
3),固定支撑腿(1
‑
1、1
‑
2、1
‑
3)旁分别设有对伸缩支撑腿的张开极限位置限制的限位部,限制其张开的角度;高度调节螺丝(2
‑
1、2
‑
2、2
‑
3、2
‑
4、2
‑
5、2
‑
6)分别安装在支撑腿(1
‑
1、1
‑
2、1
‑
3)上的螺孔内,高度调节螺丝的顶部穿过螺孔与伸缩支撑脚的外壁相抵,通过调节高度调节螺丝(2
‑
1、2
‑
2、2
‑
3、2
‑
4、2
‑
5、2
‑
6)调节伸缩支撑脚(3
‑
1、3
‑
2、3
‑
3)从固定支撑腿内伸出的长度,从而快速调整位于下支撑板7上的主水准泡14初步位于中心,这是第一步初步调平,初步调平后可以将固定支撑腿(1
‑
1、1
‑
2、1
‑
3)固定不再移动,伸缩支撑脚(3
‑
1、3
‑
2、3
‑
3)材质为防滑材质。
30.下调平板4位于三脚支撑架上方,与三脚支撑架相连,位于上调平板5的下方,下调平板4与上调平板5通过三个调平装置连接,每个调平装置均包括调平螺丝、调节螺母和限位螺母,上调平板上设有三个螺孔,下调平板上设有三个通孔,上调平板上的三个螺孔与下调平板上的三个通孔一一对应,每个调平螺丝依次穿过上调平板螺孔、调节螺母、下调平板通孔和限位螺母,通过旋转3个调平螺丝(6
‑
1、6
‑
2、6
‑
3),可以局部微调上调平板5的平衡精度,使得镶嵌在位于下支撑板7上的主水准泡14完全位于中心;当需要进行精度较高的调平时,上调平板5上还有辅助水准泡(13
‑
1、13
‑
2、13
‑
3、13
‑
4),在进行第二步调平时,可以通过主水准泡14与辅助水准泡(13
‑
1、13
‑
2、13
‑
3、13
‑
4)都进行调平判断,提高调平精度;
31.工作台分为下支撑板7、上支撑板8、升降装置、测距装置、上支撑板、智能控制器11。下支撑板通过连接螺丝与上调平板相连,所述连接螺丝设于上调平板(或下支撑板)上,所述连接螺丝相对位置的下支撑板(或上调平板)上设有螺纹孔,连接螺丝伸入螺纹孔内,如果有需要,可以旋转连接螺丝将工作台拆卸下来;下支撑板7与上支撑板8通过升降装置相连,上支撑板8材质为刚性材质,用于安放piv激光器设备等对水平精度要求较高的仪器;升降装置包括4个电动推杆(9
‑
1、9
‑
2、9
‑
3、9
‑
4),位于支撑板的4个角,保证上支撑板的稳定;测距装置包括分别位于4个电动推杆(9
‑
1、9
‑
2、9
‑
3、9
‑
4)旁的4个激光测距仪(10
‑
1、10
‑
2、10
‑
3、10
‑
4),激光测距仪(10
‑
1、10
‑
2、10
‑
3、10
‑
4)的高度完全相同,且各个激光测距仪的激光口对准上支撑板的底面,可以测量上支撑板8上升或者下降的距离。
32.所述智能控制器11包括控制器外壳、距离判别模块、按键模块、电源与单片机,所述单片机和电源设于控制器外壳内,所述电源为至少一个可拆卸充电锂电池,所述距离判别模块通过数据线分别与4个激光测距仪相连,所述单片机通过数据线与距离判别模块、按键模块、4个电动推杆连接。所述距离判别模块和按键模块设于控制器外壳的前壁面上,按键模块包括输入窗口16(数字键)、选择窗口17(确定键、上升键、下降键),距离判别模块自带有显示屏,显示屏上划分有4个用于显示距离的显示界面15,激光测距仪(10
‑
1、10
‑
2、10
‑
3、10
‑
4)所测得的距离可以在显示界面15上显示;当启动自动调平方式时,在输入窗口16输入一个需要的上升或者下降的高度,智能控制器11会控制4个电动推杆(9
‑
1、9
‑
2、9
‑
3、9
‑
4)进行升降,根据4个激光测距仪(10
‑
1、10
‑
2、10
‑
3、10
‑
4)返回的距离,智能控制器11可以进行判断后,进行局部调整,保证电动推杆(9
‑
1、9
‑
2、9
‑
3、9
‑
4)都升降了一样的高度,此外,当上支撑板8上所置放的仪器影响到工作台的水平后,智能控制器会判断激光测距仪(10
‑
1、10
‑
2、10
‑
3、10
‑
4)测得的距离不同,控制电动推杆(9
‑
1、9
‑
2、9
‑
3、9
‑
4)进行局部调整后实现
再次智能调平。
33.其中,距离判别模块的主要组成为显示屏和逻辑数字芯片,通过数据线与四个激光测距仪相连,接收激光测距仪测得的距离,进行逻辑判别后将指令输入给单片机,按键模块主要是接收信息后将指令输入给单片机,单片机与电动推杆通过数据线相连,发送指令给电动推杆后,驱动4个电动推杆的升降。
34.下面叙述上述智能调平的便携式工作台的使用方法:
35.首先对调平板进行调平,先张开三个伸缩支撑腿,根据工作台需要的高度范围内,控制三个伸缩支撑脚的高度,使得工作台处于大概水平位置;然后在根据位于下支撑板上的主水准泡,通过支撑腿上的高度调节螺丝细微调整每个伸缩支撑脚的高度,使得主水准泡的基本上位于中心,这是第一步初步调平,之后旋紧高度调节螺丝,支撑腿与支撑脚不再移动。
36.然后调整连接两块调平板的三个调平螺丝,可以控制上调平板的三个部分的高度,实现局部微调,本专利在上调平板上提供4个辅助水准泡以保证水平精度,进行上调平板的局部微调,使得主水准泡与4个辅助水准泡都位于中心,就可以保证上调平板与位于其之上的工作台处于水平状态。
37.将仪器放置在工作台(上支撑板)上,工作台的升降操作如下:自动调平模式,在按键模块输入一个需要的上升或者下降的高度,并选择上升或者下降,然后电动推杆进行升降,根据激光测距仪返回的距离,智能控制器可以进行判断后,进行局部调整,保证电动推杆都升降了一样的高度,此外,当上支撑板上所置放的仪器影响到工作台的水平后,智能控制器会判断激光测距仪测得的距离不同,控制电动推杆进行局部调整后实现再次智能调平。
38.当需要在不同高度进行多次测量时,根据需要的高度在输入窗口输入一个升降数值,电动推杆会进行升降,同时激光测距仪会测得一个距离,当距离数值与输入的升降数值不一样时,智能控制器对每个电动推杆进行判断后进行调整:
39.1、若距离为输入的值,则停止升降
40.2、若距离比输入的值大,则下降
41.3、若距离比输入的值小,则上升
42.最终控制每个电动推杆都上升或者下降了同一高度。
43.当上支撑板上所置放的仪器影响到工作台的水平或者引起支撑板的局部变形时,智能控制器进行上述的判断后,控制电动推杆进行局部升降,保持再次水平。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1