一种吊车搭载机器人的高空喷涂装置的制作方法
1.本实用新型涉及高空喷涂设备领域,具体涉及一种吊车搭载机器人的高空喷涂装置。
背景技术:
2.高大建筑物的表面涂料喷涂都是由人工操作实现的,劳动强度高,效率低,危险性大,安全事故时有发生,是现实工程建设中的一个难题,用高空喷涂设备对高大建筑物的表面进行涂料喷涂是一个必然趋势。
3.为了解决上述问题,亟需发明一种吊车搭载机器人的高空喷涂装置。
技术实现要素:
4.本实用新型的目的在于提供一种吊车搭载机器人的高空喷涂装置,有效的解决了高大建筑物喷涂问题。
5.为达到上述目的,本实用新型采用的技术方案如下:
6.一种吊车搭载机器人的高空喷涂装置,其特征在于:包括吊车、喷涂机器人、喷涂机、涂料罐和喷枪;
7.所述喷涂机器人通过连接销设置在吊车的吊车伸缩臂前端,所述喷涂机通过输料管连接喷枪,并且喷涂机将涂料罐内的涂料输送到喷枪进行喷涂;
8.所述喷涂机器人包括机械臂、载物平台和载物平台调平组件,所述载物平台调平组件控制调节载物平台处于水平状态。
9.进一步的,所述载物平台调平组件包括平台连接吊梁、电控箱、电动推杆、水平传感器、旋转轴和吊耳。
10.进一步的,所述吊车伸缩臂前端通过连接销连接吊耳;
11.所述平台连接吊梁通过旋转轴连接载物平台,并且平台连接吊梁与载物平台之间能够相对转动,所述电动推杆的前后端均通过销轴将载物平台和平台连接吊梁连接在一起;
12.所述水平传感器安装在载物平台的上平面上,并且水平传感器通过线缆连接电控箱,所述水平传感器检测载物平台是否处于水平状态;
13.所述喷枪安装在机械臂的前端;
14.所述电控箱安装在载物平台内部。
15.进一步的,所述电控箱包括调平控制系统和机器人操作系统,所述调平控制系统进行控制调节载物平台处于水平状态,所述机器人操作系统控制机械臂前端的喷枪运动到合适的喷涂位置。
16.进一步的,所述吊车和喷涂机器人操纵控制是各自独立的,并且吊车采用液压控制,所述喷涂机器人采用电气控制。
17.进一步的,所述电控箱采用有线控制的方式进行控制机械臂。
18.进一步的,所述电控箱通过电源线连接地面上的电源,并且所述电控箱采用无线遥控的方式与地面控制装置之间进行信号传输,在地面实施无线遥控控制。
19.进一步的,所述吊耳可以在平台连接吊梁的水平梁上左右移动。
20.进一步的,所述吊车和喷涂机器人的控制集成在一起,通过协调继成控制设备的运行。
21.与现有技术相比,本实用新型具有以下有益效果:
22.1、本实用新型提供的吊车搭载机器人的高空喷涂装置,可用连接销将喷涂机器人与吊车连接起来形成一个整体,形成一个自动化程度很高的高空喷涂装备;调整(改变)喷涂机器人的连接吊梁上吊耳的位置,可与多种规格、型号的吊车连接;借用吊车的功能,实现高空喷涂装备的位置运动功能,使得机器人的结构更加简捷;运输方便,使用操作灵活,机动性强,大大降低制作与使用成本。
23.2、本实用新型提供的吊车搭载机器人的高空喷涂装置;将机械臂安装在一个能自动调平的载物平台上,载物平台与平台连接吊梁采用铰链连接,电动推杆用销轴安装在载物平台与平台链接吊梁之间,形成一个喷涂机器人,电动推杆伸缩时可使载物平台与连接吊梁之间产生旋转(俯仰)运动。
24.将该机器人用销轴连接在吊车的伸缩臂(主臂)的前端(连接附臂)的销轴座上,与吊车形成一个整体。由吊车实现载物平台的位置需求(上下、左右、前后)运动,将搭载机械臂的载物平台送达指定位置,机器人(机械臂)的末端携带喷枪,在控制系统的操纵下,带动喷枪按预定的轨迹运动,实现对高大建筑物预定位置的喷涂。
25.本实用新型提供的吊车搭载机器人的高空喷涂装置,在载物平台上设置有水平传感器,可以实时检测载物平台是否处于水平位置,并通过载物平台调平组件(电动推杆的伸缩)调节载物平台始终处于水平位置。
26.显然,根据本实用新型的上述内容,按照本领域的普通技术知识和惯用手段,在不脱离本实用新型上述基本技术思想前提下,还可以做出其它多种形式的修改、替换或变更。
27.以下通过具体实施方式,对本实用新型的上述内容再作进一步的详细说明;但不应将此理解为本实用新型上述主题的范围仅限于以下的实例;凡基于本实用新型的构思所实现的技术均属于本实用新型的范围。
附图说明
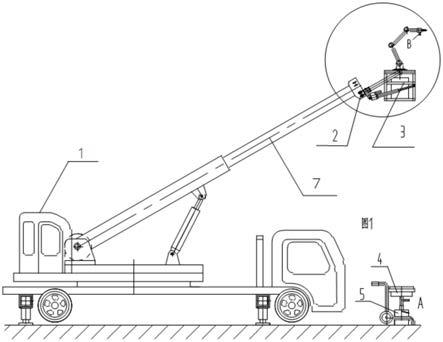
28.图1为本实用新型一种吊车搭载机器人的高空喷涂机器人结构示意图;
29.图2为本实用新型一种吊车搭载机器人的高空喷涂机器人喷涂机器人结构示意图图;
30.图3为本实用新型一种吊车搭载机器人的高空喷涂机器人平台连接吊梁处于水平状态的示意图;
31.图中:
[0032]1‑
吊车;2
‑
连接销;3
‑
喷涂机器人;4
‑
喷涂机;5
‑
涂料罐;7
‑
吊伸缩臂车;301
‑
机械臂;302
‑
载物平台;303
‑
平台连接吊梁;304
‑
电控箱;305
‑
电动推杆;306
‑
水平传感器;307
‑
旋转轴;308
‑
喷枪,309
‑
销轴;30301
‑
吊耳。
具体实施方式
[0033]
为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图,对本实用新型作进一步详细说明。
[0034]
如图1~3所示,本实用新型一种吊车搭载机器人的高空喷涂机器人,由吊车1;连接销2;喷涂机器人3;喷涂机4;涂料罐5、喷枪308等组成;
[0035]
用连接销2将喷涂机器人3与吊车1的吊车伸缩臂7上的附臂连接座连接起来,形成一个整体,在将涂料罐5放置在喷涂机4的下方,将吸料管插入涂料罐里边的涂料液中,用输料管(未画出)将喷涂机涂料出口a与喷枪涂料进口b连接起来并紧固。
[0036]
图2为喷涂机器人的结构示意图,由机械臂301、载物平台302、平台连接吊梁303、电控箱304、电动推杆305、水平传感器306、旋转轴307等组成。
[0037]
用旋转轴307将载物平台302、平台连接吊梁303连接在一起,连接处形成一个转动铰链,再将电动推杆305用销轴309连接在载物平台302、平台连接吊梁303之间,将电控箱304安装在载物平台302内,机械臂301、水平传感器306安装在载物平台302的上平面上,喷枪308等安装在机械臂301的末端,构成一个喷涂机器人3。
[0038]
连接吊梁303上的吊耳30301是可以在吊梁上左右移动的,可以通过调整位置来适应不同型号吊车的不同尺寸的连接需要,增大适用范围。
[0039]
机器人3与吊车1操纵控制是各自独立的,(也可以协调继成控制),通常情况下,吊车是液压控制,机器人是电气控制的;
[0040]
电控箱304与机械臂301之间的控制采用有线控制的方式,电控箱与地面之间除了电源线外的控制均采用无线遥控的方式控制;
[0041]
工作时,将搭载了喷涂机器人的吊车开到工作场所指定位置,启动液压工作系统,控制吊车的吊车吊臂将喷涂机器人3举送到指定位置,完成上下、左右、前后位置的运动,吊车的吊臂上下(升降)运动时,载物平台302将随之产生倾斜,安装在载物平台302是的水平传感器306检测到倾斜信息后,向电控箱中的调平控制系统发出信号,调平控制系统在接到平台倾斜程度的信号后,经分析、计算后给电动推杆305发出运动指令,控制电动推杆305伸缩,调整载物平台302始终处于水平状态;所述调平控制系统和机器人操作系统之间线缆连接。
[0042]
吊车1与喷涂机器人3在机器人操作系统和吊车操作系统的控制下协同工作,调整好机械臂301及喷枪308的工作位置,开启喷涂机后,在机器人控制系统的操控下,机械臂带动喷枪按预定的轨迹对建筑物进行喷涂工作。
[0043]
待这一个区域喷涂完毕后,通过吊车改变载物平台的位置,将机械臂及喷头带到下一个工作位置,并对这个区域进行喷涂,循环往复,直至整个工作区间完成喷涂工作为止。
[0044]
由于机器人的线缆数量较多,工作位置较高,工作区间跨度大,为防止线缆折叠、缠绕、信号衰减等问题的出现,将喷涂机器人与电控箱采用有线连接,电控箱放在载物平台内部,电控箱与地面间采用无线遥控控制。
[0045]
当然,本实用新型还可有其它多种实施方式,在不背离本实用新型精神及其实质的情况下,熟悉本领域的技术人员可根据本实用新型作出各种相应的改变和变形,但这些相应的改变和变形都应属于本实用新型所附的权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1