一种大型立面自动化喷漆系统的制作方法
1.本实用新型涉及喷漆技术领域,具体涉及一种大型立面自动化喷漆系统。
背景技术:
2.针对船舶、大型储油罐的表面的喷砂除锈、喷漆等作业,目前普遍采用的人工站在高空作业车上进行手工打磨、手工喷砂、手工喷漆,该种作业方式主要有一下弊端:
3.效率低下:由于需要频繁移动高空作业车,而高空作业车在移动时是禁止进行喷砂、喷漆作业的,因此大量的高空作业车移位会需要大量的辅助时间,一重影响工作效率;
4.人工成本高:由于人工作业,无法单人作业,需要配置几个人协同作业,需要安排人做砂粒搬运、供给及油漆调配、搬运、供给等工作,人工成本很高;
5.安全风险大:由于是高空作业,且喷砂工作是重体力的艰难工作,工人在高空作业车的工作篮里面高空作业时,安全风险很大,极易发生坠亡事故;
6.损害环境:传统人工高空作业施工方式,无法配套环保设备,喷砂时产生大量的粉尘和废砂,喷漆时会产生大量的有机废气和过喷漆雾,污染严重,对环境伤害巨大;
7.损害工人身体健康:传统人工高空作业施工方式,由于无法配套环保设备,喷砂时产生大量的粉尘导致工人易患矽肺病,喷漆时产生大量的有机废气能直接伤害工人的神经系统和心血管系统,严重损害工人身体健康。
技术实现要素:
8.本实用新型针对大型立面喷漆提供一种大型立面自动化喷漆系统,自动化作业,工作效率高且能够对喷漆产生的废气和废漆进行无害化处理,不会对人体以及环境产生危害。
9.为实现上述目的,本实用新型采用如下技术方案:
10.一种大型立面自动化喷漆系统,包括agv小车、多轴伸缩臂、机器人喷漆装置、废气收集装置、废气处理装置以及收集管,所述多轴伸缩臂设置在agv小车上,所述废气收集装置设置在多轴伸缩臂上,所述机器人喷漆装置设置在废气收集装置内,所述废气处理装置可拆卸与agv小车连接,所述收集管与废气收集装置和废气处理装置相互连通,所述agv小车用于在平地上移动,所述多轴伸缩臂用于驱动机器人喷漆装置靠近大型立面进行喷涂,所述废气收集装置用于将机器人喷漆装置喷涂产生的废漆和废气进行收集,所述收集管用于将废气收集装置所收集的废气输送至废气处理装置内,所述废气处理装置用于将收集管输送的废气进行无害化处理及排放。
11.作为优选,所述废气收集装置包括集气罩、传感器、封圈、进气口以及过滤网,所述集气罩设置在多轴伸缩臂上且一端开口,所述传感器设置在集气罩开口端的上下两侧,用于感应集气罩与立面之间的距离,所述封圈设置在集气罩的开口端上,所述进气口设置在封圈上,用于防止集气罩内部形成真空,所述过滤网设置在集气罩内且位于收集管与集气罩连接处,用于过滤喷涂产生的废漆。
12.作为优选,所述过滤网为无硅纤维网层。
13.作为优选,所述机器人喷漆装置包括机械手、喷头以及油漆泵罐,所述机械手设置在集气罩内并可在集气罩活动,所述喷头设置在机械手上,所述油漆泵罐设置在废气处理装置上并通过管道与喷头连通。
14.作为优选,所述废气处理装置包括箱体和若干连接管,所述箱体内从与废气收集管连接端开始到箱体尾端依次设置有过滤机构、气孔隔板、废气吸附装置、抽风机构、脱附燃烧机构,所述抽风机构用于提供收集废气的吸附力以及排出经过脱附燃烧机构处理的气体,所述过滤机构用于过滤废气中的颗粒物,所述废气吸附装置用于吸附净化废气中的vocs成分,所述脱附燃烧机构用于提供热气到废气吸附装置内以及对废气进行燃烧催化处理,所述脱附燃烧机构与废气吸附装置之间和脱附燃烧机构与抽风机构之间均通过连接管连通。
15.作为优选,所述过滤机构包括板式过滤器和袋式过滤器,所述板式过滤器与箱体内壁连接,所述袋式过滤器设置在板式过滤器上。
16.作为优选,所述抽风机构包括抽风机和排放管道,所述排放管道一端开口,其开口的一端穿过箱体的上表面向外延伸,用于排放抽风机抽出的气体以及脱附燃烧机构排出的气体,所述抽风机设置在排放管道上。
17.作为优选,所述脱附燃烧机构包括燃烧催化器和吸附风机,所述燃烧催化器通过连接管与废气吸附装置和排放管道连通,用于提供热气给废气吸附装置以及排放处理过的气体,所述吸附风机通过连接管与废气吸附装置连通,用于吸附废气吸附装置内脱附的气体并输送至燃烧催化器内处理。
18.作为优选,还包括移动小车,所述移动小车可拆卸地与agv小车连接,所述箱体设置在移动小车上。
19.与现有技术相比较,本实用新型的有益效果是通过多轴伸缩臂和agv小车,能够对机器人喷漆装置多个轴向进行调节,使其在喷漆效率更高,同时也能使废气收集装置更好的对喷漆产生的废气和废漆进行收集;通过在集气罩上设置传感器,能够精准控制集气罩与立面之间的距离,使得集气罩在收集废气和废漆的效果更好,且还设置进气口,使得集气罩内不会出现真空状态,进一步提高收集效果;通过设置废气处理装置,能够将收集到的废气经过处理后变为无害气体和水分进行排放,实现了环保作业。
附图说明
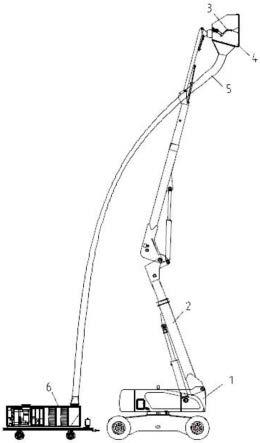
20.图1为本实用新型的整体结构示意图;
21.图2为本实用新型的废气收集装置结构示意图;
22.图3为本实用新型的废气处理装置结构示意图;
23.图4为本实用新型的a局部放大结构示意图。
具体实施方式
24.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
25.需要说明的是,当部件/零件被称为“设置在”另一个部件/零件上,它可以直接设置在另一个部件/零件上或者也可以存在居中的部件/零件。当部件/零件被称为“连接/联接”至另一个部件/零件,它可以是直接连接/联接至另一个部件/零件或者可能同时存在居中部件/零件。本文所使用的术语“连接/联接”可以包括电气和/或机械物理连接/联接。本文所使用的术语“包括/包含”指特征、步骤或部件/零件的存在,但并不排除一个或更多个其它特征、步骤或部件/零件的存在或添加。本文所使用的术语“和/或”包括一个或多个相关所列项目的任意的和所有的组合。
26.除非另有定义,本文所使用的所有的技术和科学术语与属于本技术的技术领域的技术人员通常理解的含义相同。本文中所使用的术语只是为了描述具体实施例的目的,而并不是旨在限制本技术。
27.请参阅图1至图4所示,一种大型立面自动化喷漆系统,包括agv小车1、多轴伸缩臂2、机器人喷漆装置3、废气收集装置4、废气处理装置6以及收集管5,多轴伸缩臂2设置在agv小车1上,废气收集装置4设置在多轴伸缩臂2上,机器人喷漆装置3设置在废气收集装置4内,废气处理装置6可拆卸与agv小车1连接,收集管5与废气收集装置4和废气处理装置6相互连通,agv小车1用于在平地上移动,多轴伸缩臂2用于驱动机器人喷漆装置3靠近大型立面进行喷涂,废气收集装置4用于将机器人喷漆装置3喷涂产生的废漆和废气进行收集,收集管5用于将废气收集装置4所收集的废气输送至废气处理装置6内,废气处理装置6用于将收集管5输送的废气进行无害化处理及排放。
28.在具体工作的时候,agv小车1为移动的动力源,行驶到指定的位置,然后多轴伸缩臂2进行伸展,带动机器人喷漆装置3对大型立面进行喷漆作业,废气收集装置4则对机器人喷漆装置3作业时产生的废气和废漆进行收集并通过收集管5将废气输送到废气处理装置6内,而废气处理装置6则对废气进行无害化处理和排放。
29.废气收集装置4包括集气罩41、传感器42、封圈43、进气口44以及过滤网45,集气罩41设置在多轴伸缩臂2上且一端开口,传感器42设置在集气罩41开口端的上下两侧,用于感应集气罩41与立面之间的距离,封圈43设置在集气罩41的开口端上,进气口44设置在封圈43上,用于防止集气罩41内部形成真空,过滤网45设置在集气罩41内且位于收集管5与集气罩41连接处,用于过滤喷涂产生的废漆,过滤网45为无硅纤维网层。在具体使用的时候,集气罩41通过传感器42感应得到的信息控制好与喷涂立面的距离,防止全封闭或距离间隙过大,从而影响废气的收集,进气口44可以保证集气罩41内不会形成真空,集气罩41收集的废气经过过滤网45进行过滤掉与废气混合的废漆,而后通过收集管5进入到废气处理装置6内进行无害化处理以及排放,集气罩41的负压吸力是由废气处理装置6提供。
30.机器人喷漆装置3包括机械手31、喷头32以及油漆泵罐33,机械手31设置在集气罩41内并可在集气罩41活动,喷头32设置在机械手31上,油漆泵罐33设置在废气处理装置6上并通过管道与喷头32连通。在工作的时候,机械手31驱动喷头在集气罩41内伸展和喷漆,油气泵罐33为泵体和罐体的结合,能够供应油气到喷头32上进行喷漆作业。
31.废气处理装置6包括箱体61以及若干连接管62,箱体61内从与收集管5连接端开始到箱体61尾端依次设置有过滤机构63、气孔隔板64、废气吸附装置65、抽风机构66、脱附燃烧机构67,抽风机构66用于提供收集废气的吸附力以及排出经过脱附燃烧机构67处理的气体,过滤机构63用于过滤废气中的颗粒物,废气吸附装置65用于吸附净化废气中的vocs成
分,脱附燃烧机构67用于提供热气到废气吸附装置65内以及对废气进行燃烧催化处理,脱附燃烧机构67与废气吸附装置65之间和脱附燃烧机构67与抽风机构66之间均通过连接管62连通。
32.在具体工作的时候,抽风机构66提供吸力将废气吸入到箱体61内,废气先经过过滤机构63将颗粒物进行吸附过滤,而后废气进入到废气吸附装置65内进行吸附净化,其废气吸附装置65为公知技术,在此不再过多赘述,脱附燃烧机构67通过连接管62输送100-200摄氏度的热气到废气吸附装置65内,使废气吸附装置65内的vocs成分脱附下来,vocs成分经过另外一条连接管62进入到脱附燃烧机构67内进行燃烧催化为无害的二氧化碳和水,进而通过连接管62输送到抽风机构66上进行排放,实现无害化处理及排放,提高环保。
33.过滤机构63优选为设置两组,过滤机构63包括板式过滤器631和袋式过滤器632,板式过滤器631与箱体61内壁连接,袋式过滤器632设置在板式过滤器631上,双重过滤,提高过滤的效果。
34.抽风机构66包括抽风机661和排放管道662,排放管道662一端开口,其开口的一端穿过箱体61的上表面向外延伸,用于排放抽风机661抽出的气体以及脱附燃烧机构67排出的气体,抽风机661设置在排放管道662上。
35.脱附燃烧机构67包括燃烧催化器671和吸附风机672,燃烧催化器671通过连接管62与废气吸附装置65和排放管道662连通,用于提供热气给废气吸附装置65以及排放处理过的气体,吸附风机672通过连接管62与废气吸附装置65连通,用于吸附废气吸附装置65内脱附的气体并输送至燃烧催化器671内处理。具体工作的时候,连接管62可分为热气管、吸附管和排放管,燃烧催化器671将热量通过热气管输送到废气吸附装置65内,使vocs成分脱附下来,而后吸附风机672通过吸附管将vocs成分吸附并输送到燃烧催化器671内进行燃烧催化,经过燃烧催化的气体通过排放管输送到排放管道662内进行排出。
36.还包括移动小车68,移动小车68可拆卸地与agv小车1连接,箱体61设置在移动小车68上,方便移动,其中agv小车1为现有技术,便不再详细赘述。
37.还公开一种喷漆方法,包括以下步骤:利用agv小车1导航到达指定位置并拖动废气处理装置6跟随移动;再通过多轴伸缩臂2伸展带动机器人喷漆装置3和废气收集装置4靠近需要喷涂的大型立面,多轴伸缩臂2能够多个轴向伸缩,在逐渐靠近大型立面的同时,废气收集装置4上的传感器42实时监测与大型立面之间的距离,使废气收集装置4的集气罩41与大型立面之间的距离控制在5-20mm;机器人喷漆装置3的油漆泵罐33通过导管给喷头32供应油漆,机械手31及多轴伸缩臂2驱动喷头在大型立面上进行喷涂作业;废气处理装置6通过收集管5给予集气罩41一个负压吸力,使其能够将喷头32喷涂是产生的废气和废漆进行收集,而废漆在收集时被过滤网45进行过滤,废气则通过收集管5进入到废气处理装置6内进行无害化处理及排放,基于该喷漆方法,能够大大的提高大型立面的喷漆作业效率,且比较环保。
38.本实用新型通过多轴伸缩臂2和agv小车1,能够对机器人喷漆装置3多个轴向进行调节,使其在喷漆效率更高,同时也能使废气收集装置更好的对喷漆产生的废气和废漆进行收集;通过在集气罩41上设置传感器42,能够精准控制集气罩41与立面之间的距离,使得集气罩41在收集废气和废漆的效果更好,且还设置进气口44,使得集气罩41内不会出现真空状态,进一步提高收集效果;通过设置废气处理装置6,能够将收集到的废气经过处理后
变为无害气体和水分进行排放,实现了环保作业。
39.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1