一种石英晶体的点胶定位控制方法及系统与流程
本公开涉及点胶控制,具体涉及一种石英晶体的点胶定位控制方法及系统。
背景技术:
1、点胶是石英晶体谐振器生产中一道非常重要的工艺流程,导电胶将以石英晶片的形式固定于基座上,现有加工技术对石英晶体谐振器的点胶是由点胶设备完成的,在点胶设备工作过程中,难免出现点胶定位不准确,导致点胶质量不合格的问题,需要对点胶设备控制参数进行严格把控。
2、目前,现有技术中存在由于对点胶设备的运动数据分析不够全面、详细,进而导致不能及时对点胶设备进行控制调整,点胶定位控制精度不足,以至于点胶效果不佳的技术问题。
技术实现思路
1、本公开提供了一种石英晶体的点胶定位控制方法及系统,用以解决现有技术中存在的由于对点胶设备的运动数据分析不够全面、详细,进而导致不能及时对点胶设备进行控制调整,点胶定位控制精度不足,以至于点胶效果不佳的技术问题。
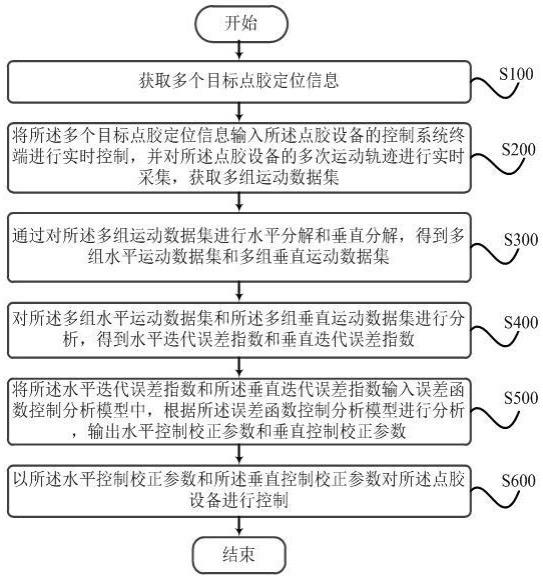
2、根据本公开的第一方面,提供了一种石英晶体的点胶定位控制方法,包括:获取多个目标点胶定位信息;将所述多个目标点胶定位信息输入所述点胶设备的控制系统终端进行实时控制,并对所述点胶设备的多次运动轨迹进行实时采集,获取多组运动数据集;通过对所述多组运动数据集进行水平分解和垂直分解,得到多组水平运动数据集和多组垂直运动数据集;对所述多组水平运动数据集和所述多组垂直运动数据集进行分析,得到水平迭代误差指数和垂直迭代误差指数;将所述水平迭代误差指数和所述垂直迭代误差指数输入误差函数控制分析模型中,根据所述误差函数控制分析模型进行分析,输出水平控制校正参数和垂直控制校正参数;以所述水平控制校正参数和所述垂直控制校正参数对所述点胶设备进行控制。
3、根据本公开的第二方面,提供了一种石英晶体的点胶定位控制系统,包括:目标信息获取模块,所述目标信息获取模块用于获取多个目标点胶定位信息;运动数据实时采集模块,所述运动数据实时采集模块用于将所述多个目标点胶定位信息输入所述点胶设备的控制系统终端进行实时控制,并对所述点胶设备的多次运动轨迹进行实时采集,获取多组运动数据集;运动数据分解模块,所述运动数据分解模块用于通过对所述多组运动数据集进行水平分解和垂直分解,得到多组水平运动数据集和多组垂直运动数据集;误差指数获取模块,所述误差指数获取模块用于对所述多组水平运动数据集和所述多组垂直运动数据集进行分析,得到水平迭代误差指数和垂直迭代误差指数;控制校正参数获取模块,所述控制校正参数获取模块用于将所述水平迭代误差指数和所述垂直迭代误差指数输入误差函数控制分析模型中,根据所述误差函数控制分析模型进行分析,输出水平控制校正参数和垂直控制校正参数;点胶设备模块,所述点胶设备控制模块用于以所述水平控制校正参数和所述垂直控制校正参数对所述点胶设备进行控制。
4、根据本公开采用的一种石英晶体的点胶定位控制方法,本公开通过对点胶设备的多组运动数据集进行水平和垂直分解,多分别对多组水平运动数据集和多组垂直运动数据集进行分析,得到水平迭代误差指数和垂直迭代误差指数,将水平迭代误差指数和所述垂直迭代误差指数输入误差函数控制分析模型中,输出水平控制校正参数和垂直控制校正参数用于对点胶设备进行控制。通过从水平和垂直两个分量进行误差分析以及控制参数校正,从而达到提升控制精度,保证点胶质量的技术效果。
5、应当理解,本部分所描述的内容并非旨在标识本公开的实施例的关键或重要特征,也不用于限制本公开的范围。本公开的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种石英晶体的点胶定位控制方法,其特征在于,所述方法应用于石英晶体的点胶定位控制系统,所述系统与点胶设备通信连接,所述方法包括:
2.如权利要求1所述的方法,其特征在于,所述方法还包括:
3.如权利要求1所述的方法,其特征在于,所述方法还包括:
4.如权利要求3所述的方法,其特征在于,所述水平迭代误差函数为:
5.如权利要求3所述的方法,其特征在于,所述垂直迭代误差函数为:
6.如权利要求1所述的方法,其特征在于,所述系统还与重力加速度传感器通信连接,方法包括:
7.如权利要求6所述的方法,其特征在于,所述方法还包括:
8.一种石英晶体的点胶定位控制系统,其特征在于,所述系统与点胶设备通信连接,所述系统包括:
技术总结
本公开提供了一种石英晶体的点胶定位控制方法及系统,涉及点胶控制技术领域,该方法包括:获取多个目标点胶定位信息;获取多组运动数据集;得到多组水平运动数据集和多组垂直运动数据集;得到水平迭代误差指数和垂直迭代误差指数;通过误差函数控制分析模型,输出水平控制校正参数和垂直控制校正参数;以所述水平控制校正参数和所述垂直控制校正参数对所述点胶设备进行控制,解决了现有技术中存在的由于对点胶设备的运动数据分析不够全面、详细,进而导致不能及时对点胶设备进行控制调整,点胶定位控制精度不足,以至于点胶效果不佳的技术问题,达到提升对点胶设备的控制精度,提高点胶质量的技术效果。
技术研发人员:相军,王阳阳
受保护的技术使用者:日照皓诚电子科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!