一种基于机器视觉的大豆育种除杂装置
1.本技术涉及机器视觉技术领域,尤其涉及一种基于机器视觉的大豆育种除杂装置。
背景技术:
2.大豆种子在育种前需要筛选掉夹杂在种子中的石子和豆梗,以及某些损坏的大豆种子。
3.在现有技术中,可通过筛选技术筛除掉石子和豆梗,可是对于某些坏损的的大豆种子却基本无法通过一般的筛除方法筛除掉,通常需要经验判断进行检测。
4.但是,如果要通过人工的方式筛选出某些坏损的的大豆种子,工作量将会过于庞大,降低工作效率,最终降低经济效益。
技术实现要素:
5.本技术提供了一种基于机器视觉的大豆育种除杂装置,能够解决大豆育种除杂装置无法筛选出某些坏损大豆种子的问题。
6.本技术的技术方案是一种基于机器视觉的大豆育种除杂装置,包括:基板和第一电机,以及均为水平设置的承重杆、第一弹簧、连接杆,以及第二电机和视觉件;
7.所述基板的主要延伸面上设置有相对的第一端侧和第二端侧;
8.所述第一电机设置在所述基板的第一端侧;
9.所述承重杆的一端的侧视呈倒圆弧状,以及所述承重杆的另一端通过所述第一弹簧与所述连接杆的一端呈水平弹性连接;
10.所述连接杆的另一端与所述第二电机的输出端呈螺纹连接;
11.所述视觉件与所述连接杆连接;
12.当所述第一电机启动,所述第一电机驱动所述基板围绕预设水平轴向从呈竖直设置的状态开始转动;在转动过程中,所述基板的第二端侧不断地挤压所述承重杆的倒圆弧端,承重杆被推动向靠近所述第二电机一侧移动,直至所述基板转动至呈水平设置的状态,所述视觉件处于所述基板的上方,用于对平铺在基板上的大豆种子进行检测;
13.当所述基板呈水平设置的状态,所述承重杆的倒圆弧端被第一弹簧弹出至滑动到所述基板的第二段侧的底端;
14.当所述第二电机启动,所述第二电机带动所述连接杆转动,间接带动所述承重杆和视觉件转动并且在水平方向上不断远离所述基板,直至所述承重杆与所述基板失去接触。
15.可选地,所述装置还包括:平铺板、第二弹簧和第三电机;
16.所述平铺板与所述基板平行设置;
17.所述平铺板的边沿处向靠近所述基板的一侧延伸出若干个滑杆;
18.若干个所述第二弹簧设置在所述基板和平铺板之间并且若干个所述第二弹簧和
滑杆的设置方向均垂直于所述基板主要延伸面的设置方向;
19.以及,当所述基板转动至呈水平设置时,所述平铺板位于所述基板的上方;
20.所述第三电机设置在所述基板上靠近第一端侧处;
21.以及,所述平铺板设置有向靠近所述基板的第一端侧的一侧延伸的延伸杆,所述延伸杆的自由端被构成为半球状;
22.以及,所述第三电机的输出端连接有圆杆状的挤压杆;
23.当所述基板呈水平设置的状态,启动所述第三电机,所述第一电机驱动所述挤压杆以圆环状的轨迹转动并且在转动过程中所述挤压杆的杆身可通过挤压所述延伸杆的半球端,间接带动所述平铺板向靠近所述基板一侧移动,直至所述挤压杆与延伸杆失去接触。
24.可选地,所述平铺板中一个远离所述基板的主要延伸面上凹陷有若干个用盛装大豆种子的铺陈区。
25.可选地,所述连接杆靠近所述承重杆的一端内水平凹陷有空槽;
26.所述第一弹簧的一端与所述空槽的内壁水平连接;
27.所述承重杆远离所述基板的一端与第一弹簧的另一端连接并且嵌设在所述空槽内,以及与所述空槽的内壁滑动连接。
28.可选地,所述装置还包括:支撑杆;
29.所述支撑杆呈直角弯折状;
30.所述支撑杆的一端与连接杆的杆身连接,以及支撑杆的另一端与所述视觉件连接。
31.可选地,所述装置还包括:壳体,以及设置在所述壳体内的筛种结构和与所述壳体的侧壁连接的固定结构;
32.所述壳体的顶端开设有物料口;
33.所述筛种结构用于对大豆种子进行预处理筛选,得到的预处理大豆种子被运送至所述基板上;
34.所述筛种结构包括:筛种筒和筛种盘;
35.所述筛种筒的设置形状在竖直方向依次包括:四棱柱段、倒棱台段和圆筒段;
36.所述筛种筒的四棱柱段的筒身上开设有可供所述筛种盘贯穿的贯穿孔;
37.所述筛种筒的四棱柱段的内侧壁上水平设置有可供所述筛种盘固定板槽;
38.当所述筛种盘贯穿所述壳体后,通过所述贯穿孔插入所述固定板槽。
39.可选地,所述筛种结构还包括:和抖动结构;
40.所述抖动结构包括:依次连接的第一转轴、活动杆、第二转轴、转盘和第四电机;
41.所述第一转轴呈水平设置并且与所述筛种筒的倒棱台段的外侧壁活动连接;
42.所述活动杆的一端与所述第一转轴转动连接,以及所述活动杆的另一端与所述第二转轴转动连接;
43.所述第一转轴与第二转轴互相平行;
44.所述第二转轴与所述转盘固定连接;
45.所述第四电机可驱动所述转盘以圆环状的轨迹转动,依次带动第二转轴、活动杆和第一转轴移动,间接带动筛种筒和筛种盘在竖直方向上反复移动。
46.可选地,所述装置还包括:固定结构;
47.所述固定结构包括:第一固定件、第二固定件和第三固定件;
48.所述第一固定件被构成为槽口方向朝向所述筛种筒的竖直设置的滑道;
49.以及,所述筛种筒的四棱柱段的外侧壁上设置有滑轮;
50.当所述筛种筒在竖直方向上反复移动时,所述滑轮可在所述滑道内滑动;
51.所述第二固定件包括:横杆、第三弹簧和插杆;
52.所述横杆呈水平设置并且与所述壳体的内侧壁固定连接;
53.所述第三弹簧套设在所述插杆的外部;
54.所述插杆呈竖直设置,以及一端贯穿所述横杆并且与所述横杆在竖直方向上滑动连接,以及另一端贯穿所述筛种筒的倒棱台段;
55.当所述筛种筒在竖直方向上反复移动时,所述第三弹簧用于缓冲所述筛种筒的移动速度,以及当所述筛种筒向下移动至最大路程后,所述横杆用于为所述筛种筒提供支撑;
56.所述第三固定件包括:竖杆、阻隔块、拉伸块和第四弹簧;
57.所述竖杆贯穿所述阻隔块并且可相对所述阻隔块在竖直方向上移动;
58.所述阻隔块设置在所述壳体的外壁;
59.所述拉伸块设置在所述竖杆贯穿所述阻隔块后的下端侧;
60.所述第四弹簧套设在所述竖杆的外部,以及一端与所述阻隔块的底端固定连接,以及另一端与所述拉伸块的顶端固定连接;
61.以及,所述筛种盘在靠近所述贯穿孔并且位于所述壳体外部的端侧上开设有垂插孔;
62.当将所述筛种盘插入所述固定板槽前,竖直向上拉动所述竖杆,所述拉伸块压缩所述第四弹簧;
63.将所述筛种盘插入所述固定板槽,松开所述竖杆,所述竖杆被所述第四弹簧推动贯穿所述垂插孔。
64.有益效果:
65.本技术通过设置可配合的基板、承重杆、第一弹簧、连接杆和第二电机,可以实现大豆种子检测前后的流转;以及通过设置视觉件,可以通过视觉件基于机器视觉对大豆种子进行损坏方向的检查处理。由于机器的自动检测使大豆种子的检测面更加广,检测效果更加好,检测效率也大幅度提高。
66.综上所述,本技术能够解决能够解决大豆育种除杂装置无法筛选出某些坏损大豆种子的问题。
附图说明
67.为了更清楚地说明本技术的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,对于本领域普通技术人员而言,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
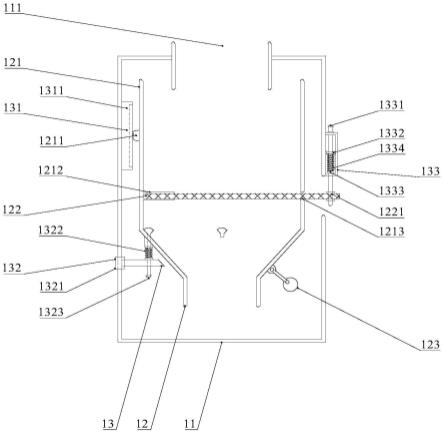
68.图1为本技术实施例中一种基于机器视觉的大豆育种除杂装置中预处理装置的侧视图;
69.图2为本技术实施例中一种基于机器视觉的大豆育种除杂装置中预处理装置的俯视图;
70.图3为本技术实施例中预处理装置中抖动结构的结构示意图;
71.图4为本技术实施例中一种基于机器视觉的大豆育种除杂装置中检测结构的侧视图;
72.图5为图4中a部分的局部示意图;
73.图6为本技术实施例中一种基于机器视觉的大豆育种除杂装置中检测结构当平铺结构与视觉结构均处于工作状态时的俯视图;
74.图7为本技术实施例中一种基于机器视觉的大豆育种除杂装置中检测结构当视觉结构转动后的俯视图;
75.图8为本技术实施例中一种基于机器视觉的大豆育种除杂装置中检测结构当平铺结构转动后的俯视图;
76.图9为本技术实施例中检测结构中平铺结构转动后的侧视图;
77.其中,1-预处理结构;11-壳体;111-物料口;12-筛种结构;121-筛种筒;1211-滑轮;1212-固定板槽;1213-贯穿孔;122-筛种盘;123-抖动结构;1231-第一转轴;1232-活动杆;1233-第二转轴;1234-转盘;1235-第四电机;13-固定结构;131-第一固定件;1311-滑道;132-第二固定件;1321-横杆;1322-第三弹簧;1323-插杆;133-第二固定件;1331-竖杆;1332-阻隔块;1333-拉伸块;1334-第四弹簧;2-检测结构;21-平铺结构;211-基板;212-平铺板;2121-铺陈区;2122-滑杆;2123-延伸杆;213-第二弹簧;214-第一电机;215-第三电机;2151-挤压杆;22-视觉结构;221-承重杆;222-第一弹簧;223-连接杆;2231-空槽;224-第二电机;225-支撑杆;226-视觉件。
具体实施方式
78.下面将详细地对实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下实施例中描述的实施方式并不代表与本技术相一致的所有实施方式。仅是与权利要求书中所详述的、本技术的一些方面相一致的系统和方法的示例。
79.本技术提供了一种基于机器视觉的大豆育种除杂装置,包括:预处理结构1和检测结构2。
80.预处理结构1用于对大豆种子进行预处理除杂,包括:壳体11、筛种结构12和固定结构13。
81.如图1所示,图1为本技术实施例中一种基于机器视觉的大豆育种除杂装置中预处理装置的侧视图,壳体11的顶端开设有一个物料口111。
82.筛种结构12设置在壳体11内,用于对大豆种子进行预处理筛选,得到的预处理大豆种子被运送至基板211上,包括:筛种筒121、筛种盘122和抖动结构123。
83.筛种筒121的设置形状被构成为在竖直方向依次包括:四棱柱段、倒棱台段和圆筒段。筛种筒121的四棱柱段的外侧壁上设置有可沿着竖直方向滑动的滑轮1211。
84.筛种筒的四棱柱段的内侧壁上水平设置有可供筛种盘122固定板槽1212。
85.筛种筒121的四棱柱段的筒身上开设有可供筛种盘122贯穿的横向的贯穿孔1213。
86.当筛种盘122贯穿壳体11后,通过贯穿孔1213插入固定板槽1212。
87.如图2所示,图2为本技术实施例中一种基于机器视觉的大豆育种除杂装置中预处
理装置的俯视图,筛种盘122为镂空设置,用于将大豆种子中不符合标准的大豆种子和杂志去除并且通过空隙落至筛种盘122的下方。
88.如图3所示,图3为本技术实施例中预处理装置中抖动结构的结构示意图,抖动结构123用于使筛种筒121和筛种盘122在竖直方向上反复移动,使筛种盘122抖动,包括:依次连接的第一转轴1231、活动杆1232、第二转轴1233、转盘1234和第四电机1235。
89.第一转轴1231呈水平设置并且与筛种筒121的倒棱台段的外侧壁活动连接。
90.活动杆1232的一端与第一转轴1231转动连接,以及活动杆1232的另一端与第二转轴1233转动连接。
91.第一转轴1231与第二转轴1233互相平行。
92.第二转轴1233与转盘1234固定连接。
93.第四电机1235可驱动转盘1234以圆环状的轨迹转动,依次带动第二转轴1233、活动杆1232和第一转轴1231移动,间接带动筛种筒121和筛种盘122在竖直方向上反复移动。
94.固定结构13包括:第一固定件131、第二固定件132和第三固定件133。
95.第一固定件131被构成为槽口方向朝向筛种筒121的竖直设置的滑道1311。当筛种筒121在竖直方向上反复移动时,滑轮1211可在滑道1311内滑动。
96.第二固定件132包括:横杆1321、第三弹簧1322和插杆1323。
97.横杆1321呈水平设置并且与壳体11的内侧壁固定连接。
98.第三弹簧1322套设在插杆1323的外部。
99.插杆1323呈竖直设置,以及一端贯穿横杆1321并且与横杆1321在竖直方向上滑动连接,以及另一端贯穿筛种筒121的倒棱台段。
100.当筛种筒121在竖直方向上反复移动时,第三弹簧1322用于缓冲筛种筒121的移动速度,以及当筛种筒121向下移动至最大路程后,横杆1321用于为筛种筒121提供支撑。
101.第三固定件133包括:竖杆1331、阻隔块1332、拉伸块1333和第四弹簧1334。
102.竖杆1331贯穿阻隔块1332并且可相对阻隔块1332在竖直方向上移动。
103.阻隔块1332设置在壳体11的外壁。
104.拉伸块1333设置在竖杆1331贯穿阻隔块1332后的下端侧。
105.第四弹簧1334套设在竖杆1331的外部,以及一端与阻隔块1332的底端固定连接,以及另一端与拉伸块1333的顶端固定连接。
106.以及,筛种盘122在靠近贯穿孔1213并且位于壳体11外部的端侧上开设有一个垂插孔。
107.当将筛种盘122插入固定板槽1212前,竖直向上拉动竖杆1331,拉伸块1333压缩第四弹簧1334。
108.将筛种盘122插入固定板槽1212,松开竖杆1331,竖杆1331被第四弹簧1334推动后贯穿垂插孔。
109.检测结构2用于对预处理大豆种子进行检测。
110.如图4和图5所示,图4为本技术实施例中一种基于机器视觉的大豆育种除杂装置中检测结构的侧视图,图5为图4中a部分的局部示意图,检测结构2包括:平铺结构21和视觉结构22。
111.如图6、图7、图8和图9所示,图6为本技术实施例中一种基于机器视觉的大豆育种
除杂装置中检测结构当平铺结构与视觉结构均处于工作状态时的俯视图,图7为本技术实施例中一种基于机器视觉的大豆育种除杂装置中检测结构当视觉结构转动后的俯视图,图8为本技术实施例中一种基于机器视觉的大豆育种除杂装置中检测结构当平铺结构转动后的俯视图,图9为本技术实施例中检测结构中平铺结构转动后的侧视图,平铺结构21用于平铺预处理大豆种子,包括:基板211、平铺板212、第二弹簧213、第一电机214和第三电机215。
112.基板211的主要延伸面上设置有相对的第一端侧和第二端侧。
113.平铺板212与基板211平行设置。平铺板212中一个远离基板211的主要延伸面上凹陷有若干个用盛装大豆种子的铺陈区2121。平铺板212的边沿处向靠近基板211的一侧延伸出若干个滑杆2122。平铺板212设置有向靠近基板211的第一端侧的一侧延伸的延伸杆2123,延伸杆2123的自由端被构成为半球状。
114.若干个第二弹簧213设置在基板211和平铺板212之间并且若干个第二弹簧213和滑杆2122的设置方向均垂直于基板211主要延伸面的设置方向。当基板211转动至呈水平设置时,平铺板212位于基板211的上方。
115.第一电机214设置在基板211的第一端侧。
116.第三电机215设置在基板211上靠近第一端侧处。第三电机215的输出端连接有圆杆状的挤压杆2151。
117.具体地,第一电机214的输出端与圆弧状的包围框固定连接,包围框与基板211的第一端侧转动连接。在实际应用中,基板211可相对于包围框自由地活动。包围框的边沿可卡住基板211的底侧,因此,当第一电机214转动时,可通过包围框带动基板211转动。
118.视觉结构22用于通过视频装置对大豆种子进行检测,包括:承重杆221、第一弹簧222、连接杆223、第二电机224、支撑杆225和视觉件226。
119.承重杆221靠近基板211的一端的侧视呈倒圆弧状。承重杆221远离基板211的一端与第一弹簧222的另一端连接并且嵌设在空槽2231内,以及与空槽2231的内壁滑动连接。
120.连接杆223的另一端与第二电机224的输出端呈螺纹连接。连接杆223靠近承重杆221的一端内水平凹陷有空槽2231。第一弹簧222的一端与空槽2231的内壁水平连接。
121.支撑杆225呈直角弯折状。支撑杆225的一端与连接杆223的杆身连接,以及支撑杆225的另一端与视觉件226连接。
122.视觉件226与连接杆223连接。
123.工作原理:
124.(一)平铺结构21的翻转:
125.包围框最初处于初始位置,此时包围框与基板211不产生力的作用。
126.当第一电机214启动,第一电机214通过包围框推动基板211围绕预设水平轴向从呈竖直设置的状态开始转动。基板211转动在转动过程中,基板211的第二端侧不断地挤压承重杆221的倒圆弧端,承重杆221被推动向靠近第二电机224一侧移动,直至基板211转动至呈水平设置的状态。
127.当基板211呈水平设置的状态,承重杆221的倒圆弧端被第一弹簧222弹出至滑动到基板211的第二段侧的底端。
128.第一电机214再次启动,将包围框转回初始位置。
129.此时,将预处理大豆种子倒在平铺板212上,启动第三电机215,第三电机215驱动
挤压杆2151以圆环状的轨迹转动并且在转动过程中挤压杆2151的杆身可通过挤压延伸杆2123的半球端,间接带动平铺板212向靠近基板211一侧移动,直至挤压杆2151与延伸杆2123失去接触。循环数次此步骤,直至预处理大豆种子平铺在平铺板212上。
130.(二)视觉结构22的检测和移动:
131.当基板211呈水平设置的状态,视觉件226处于基板211的上方,用于对平铺在基板211上的大豆种子进行检测。
132.视觉件226连接有控制器,当视觉件226检测到某个2121铺陈区上的大豆种子不合格时,传送信号至控制器,控制器通过显示设备显示不合格大豆种子所在区域,然后可挑选出不合格大豆种子。
133.可再次启动第三电机215,使平铺在平铺板212上的大豆种子翻转,然后再次检测。
134.检测次数可根据需要设定。
135.当检测完毕后,启动第二电机224,当第二电机224启动,第二电机224带动连接杆223转动,由于第二电机224与连接杆223为螺纹连接,所以当第二电机224转动,必然带动承重杆221和视觉件226转动并且在水平方向上不断远离基板211,直至承重杆221与基板211失去接触。
136.此时由于包围框已经转回初始位置,所以基板211通过自由落体从水平设置的状态转动至竖直设置的状态。检测完后的大豆种子从平铺板212上脱落。
137.大豆种子从平铺板212上脱落后,重复步骤(一),直至完成所有预处理大豆种子的检测。
138.以上对本技术的实施例进行了详细说明,但内容仅为本技术的较佳实施例,不能被认为用于限定本技术的实施范围。凡依本技术范围所作的均等变化与改进等,均应仍属于本技术的专利涵盖范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1