一种用于透明产品识别分拣的油泥压印系统的制作方法
本发明涉及流水线自动化分拣,尤其涉及一种用于透明产品识别分拣的油泥压印系统。
背景技术:
1、在工业自动化领域中,经常要对流水线上的产品进行识别并分拣,如将正面朝上的产品和反面朝上的产品进行分开,传统的识别分拣的方法主要有以下三种:
2、其一为采用3d视觉相机或线扫式相机技术来实现,通过多台相机拍照识别,如专利cn109903323b,用于透明物体识别的训练方法、装置、存储介质及终端,该专利涉及图像处理领域,使用多台相机,一台相机获取rgb图像,一台相机获取深度图像,使用rgb图像和深度图像对于一一对应起来训练。该专利主要是通过软件算法的方式识别透明产品。
3、其二为通过改变外部环境的方法识别透明件,如专利cn104180772a,一种视觉检测装置,该专利使用了一件一面为透明面一面为粗糙面的平板,光源位于透明平板的粗糙面一侧并照向粗糙面,相机位于平板透明面的一侧,根据此方法可以识别透明平板的轮廓。该专利只能识别产品轮廓,不能识别其平板中间的特征,如凹槽,凸台,无法区分产品正反面。
4、以上两种传统的识别分拣的方法存在以下缺陷:
5、1)3d视觉相机或线扫式相机方式,利用多台相机进行拍照识别,一台获取rgb图像,一台获取深度图像,将其图像一一对应起来训练学习,用于识别透明产品,该方法主要通过软件算法的方式来实现透明产品的识别,其方法配置要求高,操作复杂,成本高昂,不适用于工业应用,不适用于中低端行业的产品。
6、2)控制外部环境来识别透明件的方法,通过控制光源,屏蔽外部光源,使用垂直/横向极化度图像的垂直/横向极化度的分布来识别透明体,其方法一般过于复杂,不利于工业应用,往往使用这种方式,只能获得产品轮廓信息,无法区分其产品细节特征,也无法区分正反面。
技术实现思路
1、针对现有技术的不足,本发明提供了一种用于透明产品识别分拣的油泥压印系统,以克服现有技术中的不足。
2、为实现以上目的,本发明通过以下技术方案予以实现:
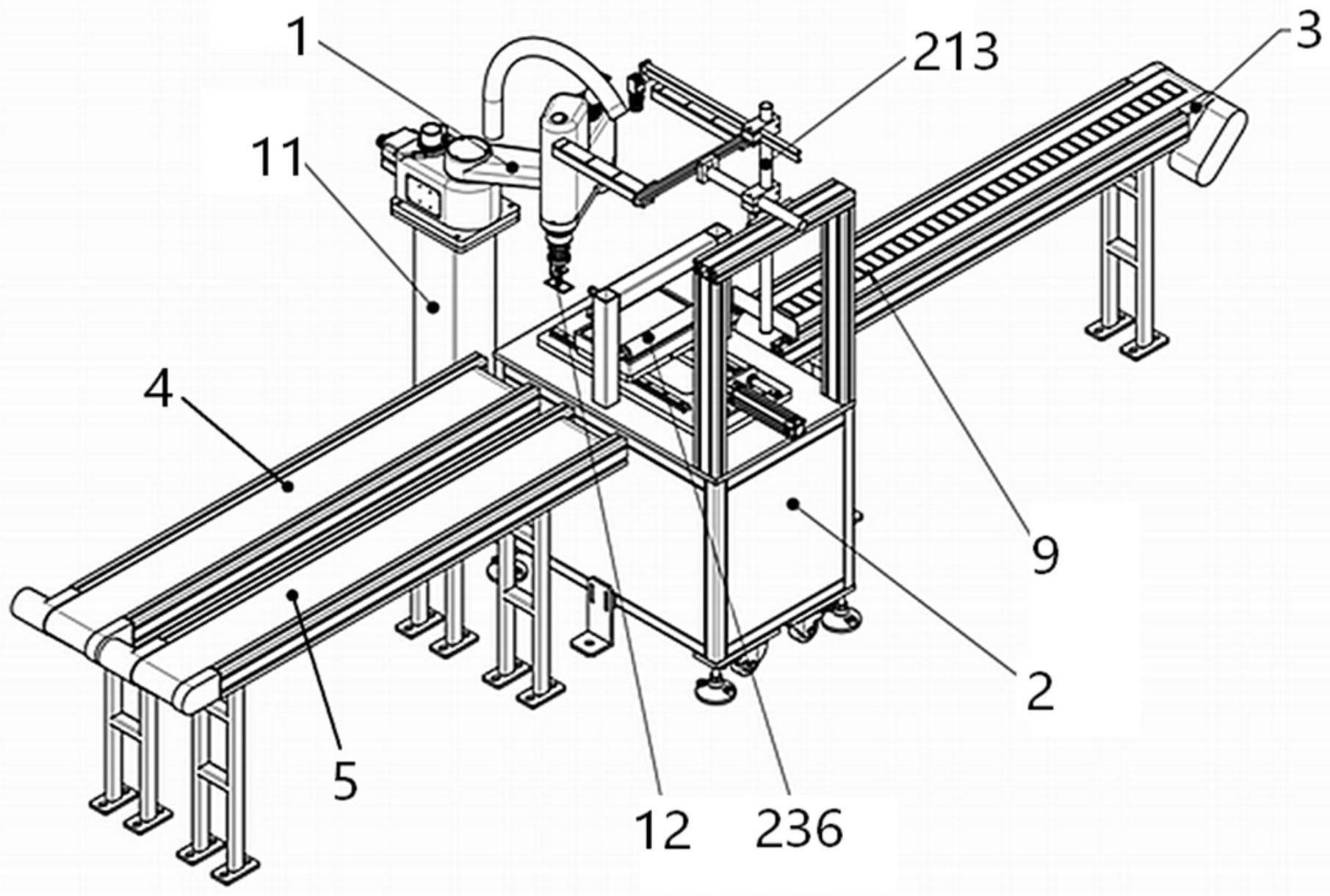
3、一种用于透明产品识别分拣的油泥压印系统,包括面对面设置的控制机器人、油泥压印台,以及设置在油泥压印台一侧的第一输送带、设置在油泥压印台另一侧的第二输送带和第三输送带;
4、所述控制机器人的关节臂上设置有可拆卸式抓取治具;
5、所述油泥压印台上设置有光源机构、成像机构和油泥处理机构;
6、所述光源机构包括有朝向油泥压印台台面的光源;
7、所述成像机构包括有朝向油泥压印台台面的视觉相机;
8、所述油泥处理机构,其包括一底板,底板上设置有线轨,线轨上设置有与其滑动配合的滑板,滑板上设置有油泥框;所述油泥处理机构还包括有一压辊安装架,该压辊安装架上安装有一压辊;所述油泥处理机构还包括有一气缸,该气缸的输出端连接所述滑板。
9、进一步的,所述光源机构包括固定竖立在油泥压印台上的支撑支架,支撑支架上设置有一安装块、安装块上竖向安装有第一十字架,第一十字架上通过第一连杆横向安装有一对光源安装板,光源安装板上安装所述光源。
10、进一步的,所述成像机构包括连接在第一十字架上的成像支架,成像支架横向设置,成像支架末端安装所述视觉相机。
11、优选的,所述线轨前端设置前限位块,线轨后端设置后限位块。
12、优选的,所述压辊安装架固定在油泥压印台的台面上,且该压辊安装架横架在所述底板上。
13、优选的,所述气缸固定在油泥压印台的台面上。
14、优选的,所述视觉相机与控制机器人电性连接;所述气缸与控制机器人电性连接。
15、优选的,所述控制机器人安装在机器人底座上。
16、优选的,所述第二输送带和第三输送带并排设置。
17、相比于现有技术,本发明的有益效果为:
18、1)本案的一种用于透明产品识别分拣的油泥压印系统,利用油泥的可塑性,将产品在油泥上压印出特征印记图案,再使用视觉相机进行拍照识别,即可识别出产品的正反面,利于产品在自动化流水线上识别和分拣,自动化程度高,效率高。
19、2)本案的一种用于透明产品识别分拣的油泥压印系统,使用油泥的可塑性来反映产品特征,成本低,解决2d视觉相机无法识别或不易识别透明件产品的缺陷,也解决传统方法识别透明产品时需要购买昂贵相机的高成本问题。
20、为了能更清晰的理解本发明,以下将结合附图说明阐述本发明较佳的实施方式。
技术特征:
1.一种用于透明产品识别分拣的油泥压印系统,其特征在于:
2.根据权利要求1所述的一种用于透明产品识别分拣的油泥压印系统,其特征在于:所述光源机构包括固定竖立在油泥压印台(2)上的支撑支架(211),支撑支架(211)上设置有一安装块(212)、安装块(212)上竖向安装有第一十字架(213),第一十字架(213)上通过第一连杆横向安装有一对光源安装板(214),光源安装板(214)上安装所述光源。
3.根据权利要求2所述的一种用于透明产品识别分拣的油泥压印系统,其特征在于:所述成像机构包括连接在第一十字架(213)上的成像支架(221),成像支架(221)横向设置,成像支架(221)末端安装所述视觉相机(222)。
4.根据权利要求1所述的一种用于透明产品识别分拣的油泥压印系统,其特征在于:所述线轨(232)前端设置前限位块,线轨(232)后端设置后限位块。
5.根据权利要求1所述的一种用于透明产品识别分拣的油泥压印系统,其特征在于:所述压辊安装架(235)固定在油泥压印台(2)的台面上,且该压辊安装架(235)横架在所述底板(231)上。
6.根据权利要求1所述的一种用于透明产品识别分拣的油泥压印系统,其特征在于:所述气缸(237)固定在油泥压印台(2)的台面上。
7.根据权利要求1所述的一种用于透明产品识别分拣的油泥压印系统,其特征在于:所述视觉相机(222)与控制机器人(1)电性连接;所述气缸(237)与控制机器人(1)电性连接。
8.根据权利要求1所述的一种用于透明产品识别分拣的油泥压印系统,其特征在于:所述控制机器人(1)安装在机器人底座(11)上。
9.根据权利要求1所述的一种用于透明产品识别分拣的油泥压印系统,其特征在于:所述第二输送带(4)和第三输送带(5)并排设置。
技术总结
一种用于透明产品识别分拣的油泥压印系统,包括面对面设置的控制机器人、油泥压印台,以及分别设置在油泥压印台两侧的第一输送带、第二输送带和第三输送带。控制机器人上设置有抓取治具。油泥压印台上设置有光源机构、成像机构和油泥处理机构。光源机构包括光源,成像机构包括视觉相机。油泥处理机构包括一底板,底板上设置有线轨,线轨上设置有滑板,滑板上设置有油泥框;油泥处理机构还包括有一压辊和一气缸,气缸的输出端连接滑板。本案的油泥压印系统,利用油泥的可塑性,将产品在油泥上压印出特征印记图案,再使用视觉相机进行拍照识别,即可识别出产品的正反面,利于产品在自动化流水线上识别和分拣,自动化程度高,效率高。
技术研发人员:叶志军,许焕彬
受保护的技术使用者:伯朗特机器人股份有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!