一种风能或潮流能发电机组俯仰与偏航力矩的在线间接测量系统及方法
1.本发明属于新能源发电装备领域,具体涉及一种风能或潮流能发电机组俯仰与偏航力矩的在线间接测量系统及方法。
背景技术:
2.作为新兴的可再生能源装备,风能发电装备已经实现了大规模应用,潮流能发电装备已经完成了从原理验证到工业化样机的发展阶段。目前,装备运行可靠性和成本成为风能、潮流能发电行业发展的瓶颈问题。其中,机组俯仰力矩和偏航力矩等非对称载荷的在线测量技术是一项关键技术。
3.非对称载荷在线测量的准确性会影响机组实时运行状态监测以及机组主动载荷控制,关系到整机运行的安全性和可靠性;同时,非对称载荷测量的准确性也会间接影响机组设计过程中的安全裕量问题,从而影响设计和运维成本。
4.对于风能或潮流能发电装备,现有技术多采用直接测量方法,例如安装应变片或光纤光栅传感器等,进行载荷测量。例如,中国专利《一种海上风电机组载荷测试装置及方法》,公开号cn113250915a,其特征在于,将多个应变片传感器分别布置在风电机组的叶根、叶中、主轴、塔筒等位置,各应变片传感器通过数据采集器与工控机相连接,工控机获取各传感器的应力统计平均值,计算得到不同位置处载荷;中国专利《一种基于fbg的风机叶片载荷测量方法及应用》,公开号cn112665766a,其特征在于,在风电机组的每个叶片上设置对应的光纤光栅传感器组,测量传感器组输出波长变化值,通过计算得到叶片实时载荷。此类直接测量方法存在以下缺点:在机组的旋转部件如叶片、主轴等位置安装传感器,安装、供电、电缆走线、信号传输等的实现难度大;被测部件的高刚度影响传感器的准确性。对于潮流能发电装备,由于水下环境的复杂性,其非对称载荷的直接测量面临更大的难题,且水流和泥沙冲击会使传感器寿命降低。
5.本发明提出一种基于间接测量的系统及方法进行风能或潮流能发电机组俯仰与偏航力矩在线测量,降低实施难度,提高测量的可靠性和可推广性。
技术实现要素:
6.为了解决背景技术中的问题,本发明提供了一种能对风能或潮流能发电机组俯仰力矩与偏航力矩进行在线间接测量、可靠性高、成本低的系统。该测量系统的测量方法能够实时获取风能或潮流能发电机组的俯仰力矩与偏航力矩,实现难度小。
7.本发明采用的技术方案如下:
8.一、一种风能或潮流能发电机组俯仰与偏航力矩的在线间接测量系统
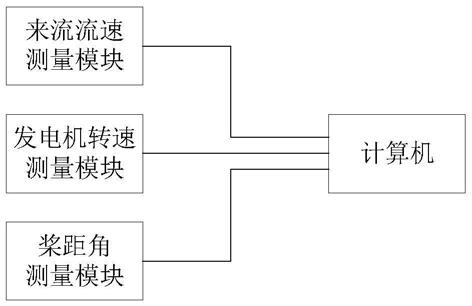
9.包括来流流速测量模块、发电机转速测量模块、桨距角测量模块和计算机;来流流速测量模块用于测量发电机组叶轮中心处的流速,发电机转速测量模块用于测量发电机组的发电机转速,桨距角测量模块用于测量发电机组各叶片的桨距角;来流流速测量模块、发
电机转速测量模块和桨距角测量模块均通过通信线缆与计算机实现串口通信连接,分别将流速信号、转速信号和桨距角信号传输至计算机。
10.所述计算机根据接收到的流速信号、转速信号和桨距角信号在线计算风能或潮流能发电机组的俯仰力矩和偏航力矩,并将流速信号、转速信号、桨距角信号、俯仰力矩和偏航力矩进行实时显示和存储。
11.对于风能发电机组:所述来流流速测量模块采用测风仪,固定于发电机组机舱外的顶部;所述发电机转速测量模块安装于发电机组机舱内的齿轮箱高速轴处;所述桨距角测量模块布置于发电机组叶轮轮毂内部的变桨装置处。
12.对于潮流能发电机组:所述来流流速测量模块采用流速流向仪,布置于发电机组叶轮中心点沿潮流方向正前方的位置处;所述发电机转速测量模块安装于发电机组机舱内的齿轮箱高速轴处;所述桨距角测量模块布置于发电机组叶轮轮毂内部的变桨装置处。
13.二、采用上述系统的风能或潮流能发电机组俯仰与偏航力矩的在线间接测量方法,包括以下步骤:
14.步骤1)根据三维建模软件构建发电机组的叶片三维模型,通过三维仿真分析,得到叶片受力等效作用点的位置坐标,并计算叶片受力等效作用点与叶轮中心的距离;
15.如图4所示,根据叶片的翼型、质量分布等特征,通过三维仿真分析,得到叶片的受力等效作用点位置坐标,计算叶片受力等效作用点与叶轮中心的距离;
16.步骤2)来流流速测量模块、发电机转速测量模块、桨距角测量模块分别将测量得到的流速信号、转速信号、桨距角信号传输至计算机;
17.步骤3)计算机将接收到的流速信号、转速信号、桨距角信号进行滤波处理,去除噪声干扰;根据步骤1)中仿真得到的叶片受力等效作用点和叶轮中心的距离,以及滤波后得到的叶轮中心处流速、发电机转速和各叶片的桨距角数据,实时计算得到风能或潮流能发电机组的俯仰力矩和偏航力矩;
18.步骤4)计算机将步骤2)中实测得到的流速、发电机转速和各叶片的桨距角数据,以及步骤3)中计算得到的俯仰力矩和偏航力矩,通过监控界面进行实时显示,并全部存储。
19.所述步骤3)具体为:
20.3.1)对发电机转速ω进行积分运算,与各叶片初始方位角θi'相加,得到各叶片的当前方位角θi,其中i=1,2,
…
,n,n为叶片总数,具体公式为:
[0021][0022]
其中,t为时间。
[0023]
3.2)根据叶轮中心处流速vs、各叶片当前方位角θi和叶片受力等效作用点与叶轮中心的距离rc,基于流剪切公式计算每个叶片在受力等效作用点处的流速vi,具体为:
[0024][0025]
其中,vi为受力等效作用点处的流速,zh为受力等效作用点距离地面(风能发电机组)或海床平面(潮流能发电机组)的高度,zs为叶轮中心距离地面或海床平面的高度,vs为叶轮中心的流速,α为剪切系数;
[0026]
在已知叶片受力等效作用点与叶轮中心的距离、叶轮中心距离地面的高度、各叶
片当前方位角θi的情况下,通过三角变换得到受力等效作用点距离地面的高度zh。
[0027]
3.3)根据发电机转速ω和叶轮中心处流速vs,计算得到叶尖速比λ,具体公式为:
[0028][0029]
其中,r为叶尖与叶轮中心处的距离;
[0030]
根据叶尖速比λ和桨距角测量模块测得的各叶片桨距角βi,通过叶素-动量理论计算得到叶轮推力系数c
t
;根据叶轮推力系数c
t
和叶轮中心处流速vs,计算叶轮推力t,具体计算公式为:
[0031][0032]
式中,ρ为空气密度(风能发电机组)或海水密度(潮流能发电机组),s为叶轮扫掠面积;
[0033]
3.4)计算每个叶片的非轴向力矩m
yi
,具体计算公式为:
[0034][0035]
3.5)将所有叶片的非轴向力矩m
yi
沿俯仰方向和偏航方向分解并分别求和,得到叶轮的俯仰力矩m
tilt
和偏航力矩m
yaw
,具体计算公式为:
[0036][0037]
所述步骤3.1)中,以叶轮轮毂为原点构建二维坐标系,其中,x轴和y轴均位于叶轮旋转平面上,x轴为叶轮旋转平面上的水平轴,y轴为叶轮旋转平面上的竖直轴;叶片的方位角为叶片相对于x轴的旋转角。
[0038]
本发明的有益效果是:
[0039]
1、使用间接测量方法进行俯仰与偏航力矩的在线测量,避免直接测量方法难度大、成本高、可靠性低的问题,来流流速、发电机转速和桨距角的测量模块可靠性高,系统易于构建,方法易于实现。
[0040]
2、实现可靠的俯仰与偏航力矩在线测量和实时反馈,为机组实时运行状态监测以及机组主动载荷控制提供关键数据,提高整机运行的安全性和可靠性。
[0041]
3、记录机组运行全周期的俯仰与偏航力矩数据,为机组优化设计过程提供可靠数据参考,避免由于缺乏机组俯仰与偏航力矩实测数据导致的冗余设计,降低机组设计成本。
附图说明
[0042]
图1为本发明系统的结构示意图。
[0043]
图2为本发明方法的流程示意图。
[0044]
图3为本发明系统在风电机组上的一种实施例的布置位置图。
[0045]
图4为本发明发电机组叶片三维模型结构示意图。
[0046]
图5为本发明系统在潮流能发电机组上的一种实施例的布置位置图。
[0047]
图中:1、来流流速测量模块,2、发电机转速测量模块,3、桨距角测量模块,4、计算机,5、通信线缆,6、风电机组机舱,7、风电机组轮毂,8、潮流能发电机组机舱,9、潮流能发电机组轮毂。
具体实施方式
[0048]
下面结合附图及具体实施例对本发明作进一步详细说明,但并不将本发明局限于以下具体实施方式。
[0049]
实施例一
[0050]
参照图1和图3,本实施例提供了一种风电机组俯仰与偏航力矩的在线间接测量系统,包括来流流速测量模块1、发电机转速测量模块2、桨距角测量模块3和计算机4。其中,所述来流流速测量模块1用于测量风电机组叶轮中心处的风速;所述发电机转速测量模块2用于测量机组的发电机转速;所述桨距角测量模块3用于测量机组各叶片的桨距角;所述计算机4用于接收流速信号、转速信号和桨距角信号,通过在线实时计算处理,得到风电机组的俯仰力矩和偏航力矩,并将测量和计算数据实时显示和存储。
[0051]
所述来流流速测量模块1使用测风仪,其布置于风电机组外部,固定在机舱顶部。
[0052]
所述发电机转速测量模块2布置于机组机舱6内部的齿轮箱高速轴处;所述桨距角测量模块3布置于机组轮毂7内部的变桨装置处。发电机转速测量模块2和桨距角测量模块3的布置位置均位于机组内部,且相对保持静止,安装难度小,测量可靠性高。
[0053]
所述来流流速测量模块1、发电机转速测量模块2和桨距角测量模块3均通过通信线缆5与计算机4实现串口通信连接,分别将流速信号、转速信号和桨距角信号传输至计算机4。
[0054]
参照图2,本实施例提供了一种风电机组俯仰与偏航力矩的在线间接测量方法,采用了上述的风电机组俯仰与偏航力矩的在线间接测量系统,其步骤如下:
[0055]
步骤1)根据风电机组叶片设计参数,在计算机4的三维建模软件ansys workbench中,建立风电机组的叶片三维模型,如图4所示,根据叶片的翼型、质量分布等特征,通过三维仿真分析,得到叶片的受力等效作用点位置坐标,计算叶片受力等效作用点与叶轮中心的距离;
[0056]
步骤2)来流流速测量模块1、发电机转速测量模块2、桨距角测量模块3分别与计算机4建立串口通信连接,在机组实际运行过程中,分别对叶轮中心处的风速、发电机转速和各叶片的桨距角进行实时测量,并将风速信号、转速信号、桨距角信号传输至计算机4;
[0057]
步骤3)计算机4接收步骤2)中各模块传输的风速信号、转速信号、桨距角信号并进行滤波处理,去除噪声干扰;根据步骤1中仿真得到的叶片受力等效作用点和叶轮中心的距离,以及滤波后得到的风速、发电机转速和各叶片的桨距角数据,实时计算得到风电机组的俯仰力矩和偏航力矩;
[0058]
所述俯仰力矩和偏航力矩的计算过程如下:
[0059]
3.1)对发电机转速测量模块1测得的发电机转速ω进行积分运算,与各叶片初始方位角θ
i0
相加,得到各叶片的当前方位角θi;本实施例的风电机组为三叶片设计,i的取值范围为{1,2,3};
[0060][0061]
以轮毂为原点构建二维坐标系,x轴,y轴位于叶轮旋转平面上,x轴为叶轮旋转平面上的水平轴,y轴为叶轮旋转平面上的竖直轴。叶片的方位角为叶片相对于x轴的旋转角。
[0062]
3.2)根据来流流速测量模块2测得的叶轮中心处风速vs,以及各叶片当前方位角θi和叶片受力等效作用点与叶轮中心的距离rc,计算各叶片等效作用点处的风速vi,计算方法基于流剪切公式:
[0063][0064]
式中,zh为待求位置离地面的高度,vi为待求位置的风速,zs为叶轮中心离地面的高度,vs为叶轮中心风速,α为剪切系数;待求位置为待求叶片的受力等效作用点;
[0065]
在叶片受力等效作用点与叶轮中心的距离、叶轮中心距离地面的高度、各叶片当前方位角θi已知的情况下,通过三角变换可以得到受力等效作用点距离地面的高度zh。
[0066]
3.3)根据发电机转速ω和叶轮中心处风速vs,计算得到叶尖速比λ,具体公式为:
[0067][0068]
其中,r为叶尖与叶轮中心处的距离。
[0069]
根据叶尖速比λ和桨距角测量模块3测得的各叶片桨距角βi,通过叶素-动量理论计算得到叶轮推力系数c
t
;根据推力系数c
t
和叶轮中心处风速vs,计算叶轮推力t,计算公式为:
[0070][0071]
式中,ρ为空气密度,s为叶轮扫掠面积;
[0072]
3.4)计算叶片i的非轴向力矩m
yi
,计算公式为:
[0073][0074]
3.5)将三只叶片的非轴向力矩m
yi
沿俯仰方向和偏航方向分解并分别求和,得到叶轮的俯仰力矩m
tilt
和偏航力矩m
yaw
,计算公式为:
[0075][0076]
步骤4)计算机4将步骤2)中实测得到的风速、发电机转速和各叶片的桨距角数据,以及步骤3中计算得到的俯仰力矩和偏航力矩,通过监控界面进行实时显示,并全部存储。
[0077]
实施例二
[0078]
参照图1、图2和图5,本实施例提供了一种潮流能发电机组俯仰与偏航力矩的在线间接测量系统及方法。
[0079]
本实施例提供的一种潮流能发电机组俯仰与偏航力矩的在线间接测量系统与实
施例一中的基本相同,所不同的是:所述来流流速测量模块1用于测量潮流能发电机组叶轮中心处的潮流流速;所述来流流速测量模块1使用流速流向仪,其布置于潮流能发电机组叶轮中心点沿潮流方向正前方的适当距离处。
[0080]
本实施例提供的一种潮流能发电机组俯仰与偏航力矩的在线间接测量方法与实施例一中的基本相同,所不同的是:建立潮流能发电机组的叶片三维模型进行仿真分析;读取、计算、显示、存储的风速更换为潮流流速;计算过程中,zh为待求位置离海床平面的高度,zs为叶轮中心离海床平面的高度,ρ为海水密度。
[0081]
以上仅描述了本发明的基本原理和优选实施方式,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1