一种可变气门正时相位角度的计算方法与流程
1.本发明属于汽车动力系统控制的技术领域。更具体地,本发明涉及一种可变气门正时相位角度的计算方法。
背景技术:
2.随着科技的发展,人们对汽车的动力性能以及低排放有了更高的要求。本发明可变气门正时技术使用的是相位和速度双闭环调节,通过调节相位角度,从而调节进排气气门的打开关闭时刻,进而达到提高动力性能和增加燃油充分性的效果。然而这项技术成功的关键一点是相位角度的计算,不仅对相位角度的精确度要求很高,而且对相位角度的样本量要求也很高。
3.现有技术的存在的问题和缺陷是:
4.传统相位角度计算仅仅依靠凸轮轴信号的边沿计算的,由于凸轮轴信号盘齿数较少,最常见有3齿、4齿和6齿信号盘,即使上升沿和下降沿均计算相位角,凸轮轴转动一圈,相位角度的样本量最多12个。然而相位闭环对相位角度的样本量要求较高,故传统的通过边沿计算相位角度根本不满足要求。
技术实现要素:
5.本发明提供一种可变气门正时相位角度的计算方法,其目的是增加样本数量,提高计算的精度。
6.为了实现上述目的,本发明采取的技术方案为:
7.本发明的可变气门正时相位角度的计算方法,包括以下步骤:
8.步骤1、开始;
9.步骤2、初始化芯片和变量;
10.步骤3、判断:凸轮轴是否中断;如果是,则进行下一步骤;如果否,则进入步骤6;
11.步骤4、判断:是否为凸轮轴第二齿;如果是,则进行下一步骤;如果否,则返回步骤3;
12.步骤5、计算出凸轮轴第二齿的边沿相位角度;将霍尔计步和曲轴计数清零;
13.步骤6、判断:曲轴是否中断;如果是,则进行下一步骤;如果否,则进入步骤8;
14.步骤7、曲轴计数;然后进入步骤10;
15.步骤8、判断:霍尔是否中断;如果是,则进行下一步骤;如果否,则返回步骤3;
16.步骤9、霍尔计步;然后进行下一步骤;
17.步骤10、根据减速器的特性,计算出计步法相位角度;然后返回步骤3。
18.所述的相位角度的计算方法应用于电动可变气门正时闭环控制系统,所述的控制系统实时获取曲轴信号、凸轮轴信号以及霍尔信号。
19.所述的曲轴信号由设在汽车发动机曲轴上的曲轴传感器采集。
20.所述的控制系统包括电机,所述的霍尔信号由设在电机上的霍尔信号传感器采
集。
21.所述的凸轮轴信号由与设在减速器相连接的凸轮轴上的凸轮轴传感器采集;所述的减速器与电机主轴连接。
22.在所述的步骤4中,当识别到非第二齿时,其相位角度为:边沿相位角度+fa+fb;所述的fa为霍尔步数;所述的fb为曲轴个数。
23.所述的fa和fb是根据设有evvt控制器的控制系统进行计算得出;所述的evvt控制器为电动可变气门正时控制器。
24.所述的evvt控制器实时采集曲轴凸轮轴信号和霍尔信号,通过霍尔信号实时计算电机实际转速,通过曲轴凸轮轴信号和霍尔信号计算当前实际相位角度。
25.所述的控制系统通过调节凸轮轴的正时角度来调整进气量、排气量和气门开闭时间。
26.本发明采用上述技术方案,不仅大幅增加了样本数量,提高可变气门正时相位角度的计算精度,而且实时性好,有利于相位闭环算法的实现,更有利于相位的稳定性。
附图说明
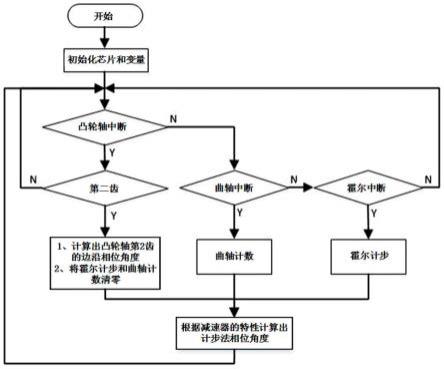
27.图1为本发明的计算方法的流程示意图。
具体实施方式
28.下面对照附图,通过对实施例的描述,对本发明的具体实施方式作进一步详细的说明,以帮助本领域的技术人员对本发明的发明构思、技术方案有更完整、准确和深入的理解。
29.如图1所示本发明的计算方法的流程,是本发明提供的可变气门正时相位角度的计算方法。本发明推出的是一种新的相位角度计算方法,其基于边沿相位角的计步法,应用在闭环控制系统的相位闭环反馈控制。
30.为了解决现有技术存在的问题并克服其缺陷,实现增加样本数量,提高计算的精度的发明目的,本发明采取的技术方案为:
31.如图1所示,本发明的可变气门正时相位角度的计算方法,包括以下步骤:
32.步骤1、开始;
33.步骤2、初始化芯片和变量;
34.步骤3、判断:凸轮轴是否中断;如果是,则进行下一步骤;如果否,则进入步骤6;
35.步骤4、判断:是否为凸轮轴第二齿;如果是,则进行下一步骤;如果否,则返回步骤3;
36.步骤5、计算出凸轮轴第二齿的边沿相位角度;将霍尔计步和曲轴计数清零;
37.步骤6、判断:曲轴是否中断;如果是,则进行下一步骤;如果否,则进入步骤8;
38.步骤7、曲轴计数;然后进入步骤10;
39.步骤8、判断:霍尔是否中断;如果是,则进行下一步骤;如果否,则返回步骤3;
40.步骤9、霍尔计步;然后进行下一步骤;
41.步骤10、根据减速器的特性,计算出计步法相位角度;然后返回步骤3。
42.其计算的结果,反馈给控制系统中,实现控制系统的闭环控制。
43.采用这种计步法,不仅可以增加样本量,还可以提高精确度,而且实时性好,有利于相位闭环算法的实现,更有利于相位的稳定性。
44.所述的相位角度的计算方法应用于电动可变气门正时闭环控制系统,所述的控制系统实时获取曲轴信号、凸轮轴信号以及霍尔信号。
45.本发明是采用基于边沿相位角的计步法计算相位角度的,控制系统的单片机实时捕获曲轴信号、凸轮轴信号以及霍尔信号。
46.捕获到曲轴信号并记录曲轴个数,捕获霍尔信号并记录霍尔步数,捕获凸轮轴信号并进行凸轮轴齿的识别和分类。
47.由此可见,凸轮轴转一圈,会用边沿相位角度更新一次计步法相位角度的;没有达到一圈时,都是通过计步法计算相位角度的。
48.而计步法计算相位角度的周期是根据系统需求决定的,相位角度的样本量会随着发动机转速的变化而变化,当发动机转速较低时,以曲轴60缺2齿凸轮轴6齿为例,凸轮轴转一圈样本量可高达120个,比单纯边沿计算相位角的样本大扩大了10倍。
49.所述的曲轴信号由设在汽车发动机曲轴上的曲轴传感器采集。
50.所述的控制系统包括电机,所述的霍尔信号由设在电机上的霍尔信号传感器采集。
51.所述的凸轮轴信号由与设在减速器相连接的凸轮轴上的凸轮轴传感器采集;所述的减速器与电机主轴连接。
52.系统识别到凸轮轴第二齿时,相位角度等于边沿相位角度;计算出边沿相位角度同时,将曲轴计数和霍尔计步清零;
53.在所述的步骤4中,当识别到非第二齿时,其相位角度为:边沿相位角度+fa+fb;所述的fa为霍尔步数;所述的fb为曲轴个数。
54.所述的fa和fb是根据设有evvt控制器的控制系统进行计算得出;所述的evvt控制器为电动可变气门正时控制器。
55.识别到非第2齿时,相位角度为:边沿相位角度+fa(霍尔步数)+fb(曲轴个数),fa和fb是根据整套evvt系统进行计算得来。
56.evvt控制器实时采集曲轴凸轮轴信号以及电机霍尔信号,快速并精确的跟随目标相位角度。电动vvt根本不受发动机转速限制,解决了液压vvt低转速、低温无法调相,以及调相缓慢和精度低的问题。
57.所述的evvt控制器实时采集曲轴、凸轮轴信号和霍尔信号,通过霍尔信号实时计算电机实际转速,通过曲轴凸轮轴信号和霍尔信号计算当前实际相位角度。
58.所述的控制系统通过调节凸轮轴的正时角度来调整进气量、排气量和气门开闭时间。
59.与电机的霍尔信号传感器反馈的实际相位进行比较,形成相位闭环,并且与凸轮轴速度一起计算出电机目标速度。
60.上面结合附图对本发明进行了示例性描述,显然本发明具体实现并不受上述方式的限制,只要采用了本发明的方法构思和技术方案进行的各种非实质性的改进,或未经改进将本发明的构思和技术方案直接应用于其它场合的,均在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1